
一种VSC-HVDC控制系统的PI参数整定方法
2015-05-05 05:58杨晓楠陈红坤胡文燕杨睿茜
现代电力 2015年4期
杨晓楠,陈红坤,缪 芸,王 岭,胡文燕,杨睿茜
(武汉大学电气工程学院,湖北武汉 430072)
一种VSC-HVDC控制系统的PI参数整定方法
杨晓楠,陈红坤,缪 芸,王 岭,胡文燕,杨睿茜
(武汉大学电气工程学院,湖北武汉 430072)
由于VSC-HVDC大多采用的是直接电流控制策略,其采用的电流内环和电压、功率外环控制均通过PI调节器进行串联校正。因此采用合适的方法设计PI调节器的参数,对于控制系统的性能起着至关重要的作用。本文提出一种参数整定方法,综合考虑控制系统的稳态误差、上升时间、抗干扰性能3个指标,将电流内环、功率外环、直流电压外环分别设计为典型的I型环节,典型的一阶环节和典型的II型环节,使得控制系统具有良好的稳态和动态性能,最后在PSCAD/EMTDC中仿真验证所建立模型的有效性。
VSC-HVDC;控制系统;PI调节器;电流内环;外环
0 引 言
20世纪70年代,随着电力电子技术的突飞猛进的发展, HVDC 技术得到广泛应用。目前高压直流(HVDC)输电技术主要有两种形式,即传统的HVDC技术和基于VSC技术的HVDC技术。传统HVDC技术本身存在以下的缺点:工作在有源逆变状态,容易换相失败,无功消耗大,输出电压、输出电流谐波含量高等。VSC-HVDC采用全控型器件并结合脉冲宽度调制技术,因此没有无功补偿和换相失败问题,可以为无源系统供电,可独立调节有功功率和无功功率,谐波水平低等。随着可关断器件容量的不断提升及性能的不断改进,VSC-HVDC将拥有广阔的发展应用场景[1-3]。
但是VSC-HVDC的运行性能是和换流器的控制策略好坏紧密联系的,而控制策略的优良最终又是和控制参数息息相关的。因此合适的控制参数对于控制策略的实现具有很重要的作用,目前专门针对VSC-HVDC控制系统PI参数整定的文献较少。文献[4]采用模最优和对称最优的方法整定控制系统的PI参数,其公式简单明了,但是如果系统调试时性能不够满意,不能明确调整参数的方向,灵活性较差。
1 直接电流控制
直接电流控制是大功率换流器,包括轻型直流输电系统广泛采用的控制方式。它有内环控制和外环控制两部分。其两端换流站的控制系统结构对称,其模型主要由内环电流控制器、外环电压、功率控制器、锁相同步环节和触发脉冲生成环节等几个部分组成。VSC-HVDC换流站的直接电流控制模型如图1所示。
电流内环控制用来快速跟踪由外环控制器提供的参考电流,同时产生换流器交流侧预期输出波形信号的信息。外环控制有定直流电压、定交流电压、定有功功率、定无功功率、定频率控制5种基本策略,用来跟踪给定的参考信号。锁相环节输出的相位信号用于提供电压矢量定向控制和触发脉冲生成所需的基准相位。触发脉冲生成环节是根据PWM原理,利用电流环输出的参考电压和同步相位信号产生换流器各桥臂的触发脉冲[1-2]。
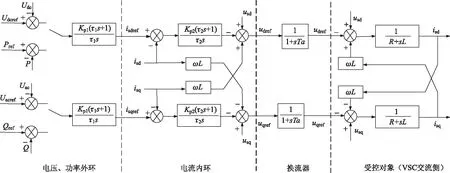
图1 VSC-HVDC换流站的直接电流控制模型
2 控制系统设计
电流内环控制设计目标是:稳态误差为零,且具有快速响应能力。外环控制设计目标除了保证稳态误差为零和一定的响应速度,还需着重考虑其抗干扰能力。本文外环控制器设计以直流电压外环控制器和无功功率外环控制器为例。
2.1 电流内环控制器设计
2.1.1 电流内环控制器模型
如图1所示,为了消除d、q轴之间的电流耦合和电网电压扰动,通过引入d、q轴电压耦合补偿项,同时对电网扰动电压采取前馈补偿,实现d、q轴电流的独立解耦控制的同时还提高了系统的动态性能,解耦后的电流内环控制框图如图2所示。

图2 解耦后的电流内环控制器框图
其中代表PI调节器的传递函数如式(1)所示,其中Kp、Ti分别为比例系数和积分时间常数。
(1)
理想情况下只考虑PWM换流器有Ta的延时,即为一阶惯性环节,其传递函数如式(2)所示,其中Ta=Tswitch/2,Tswitch为换流器的开关周期。
(2)
受控对象即VSC交流侧模型的传递函数如式(3),其中τ=L/R。R为VSC功率损耗的等效电阻,L为联结变压器和换流电抗器的等效电感。
(3)
最终电流内环控制的开环传递函数:
(4)
式中:K=Kp/RTi。
2.1.2 电流内环控制器参数设计
由式(4)传递函数的形式可知,由于采用了PI调节器,电流内环控制阶跃响应的稳态误差为零。电流内环要求具有快速响应能力,因此按照将电流内环整定为典型I型环节进行PI调节器的设计。首先零、极点相消,即Ti=τ(Ta<τ),消去时间常数较大的极点,增加内环的速度性,此时式(4)对应的闭环传递函数形式:
(5)
与典型I型系统传递函数的一般形式相比:
(6)
式中:ωn为系统的无阻尼自然频率;ξ为系统的阻尼比;得到参数K、Ta与标准形式中阻尼比ξ之间的关系如式(7):
(7)
再根据典型I型系统的性能指标与参数间已知的解析关系[5],选择合适的阻尼比,最终得到电流内环PI调节器的比例系数Kp和时间常数Ti分别为
Kp=Rτ/4ξ2Ta,Ti=τ
(8)
2.2 无功功率外环控制器设计
2.2.1 无功功率外环控制器模型
无功功率测量值与无功功率指令值的偏差经PI调节,可转为无功电流的参考量,图3所示的即为无功功率控制器。
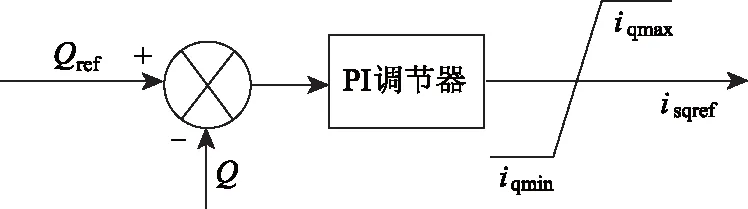
图3 外环无功功率控制器模型
加入外环的控制框图结构如图4所示。

图4 加入外环的控制框图
PI调节器的传递函数如下,同式(1)。将式子(7)带入式子(5),得到参数整定后电流内环的闭环传递函数为
(9)
为了外环参数的整定的简便性,用一个一阶惯性环节等效上述的电流内环闭环传递函数。等效的原则是等效前后的阶跃响应误差相等即
(10)
进行拉普拉斯变换即
(11)
其中二者阶跃响应的误差是
(12)
将式(12)带入式(11)
(13)
得到
Teq=4ξ2Ta
(14)
式中:Teq为一阶惯性环节的等效时间常数[4]。电流内环控制器的闭环传递函数(8)最终简化为式(15):
(15)
usd、usq为系统电压通用量Us在d-q同步旋转坐标轴上的投影。当电网电压向量定向d轴即usq=0时,有
(16)
由式(16)可知,其比例系数即为系统的传递函数,所以系统的传递函数为
(17)
加入无功功率功率外环后整个控制的开环传递函数为
(18)
式中:K=3UsdKp/2Ti
2.2.2 无功功率外环控制器参数设计
由式(18)的传递函数形式可知,无功功率外环在阶跃响应的稳态误差为零。按照将功率外环整定为典型一阶环节进行PI调节器的设计。首先零、极点相消,即Ti=Teq,式(19)对应的闭环传递函数为
(19)
按照实际系统对于速度的要求选择t,其中t=2.2T(T=1/K),考虑随后串联一阶惯性环节造成的延时,增加20%的时间裕度,即
t=2.2T(1+20%)
(20)
得到功率外环PI调节器的比例系数Kp和时间常数Ti分别为
(21)
由于功率外环控制对抗干扰能力有一定的要求,因此可以串联一个一阶惯性环节增加系统的抗干扰能力,在不改变剪切频率的同时增加系统的高频段衰减速度,从而增加系统的抗干扰能力。
由于有功功率外环控制器的系统传递函数同无功功率外环控制器是相同的,故式(21)的PI参数对有功功率外环控制器也是适用的。
2.3 直流电压外环控制器
2.3.1 直流电压外环控制器模型
采用定直流电压控制模式的换流站可以用于平衡直流系统有功功率和保持直流侧电压稳定,直流两侧的有功功率不平衡将引起直流电压的波动,通过直流侧电容的充、放电直至直流电压稳定在设定值。图5所示定直流电压控制器,直流电压和直流电压指令偏差经PI调节后作为有功电流的参考量。
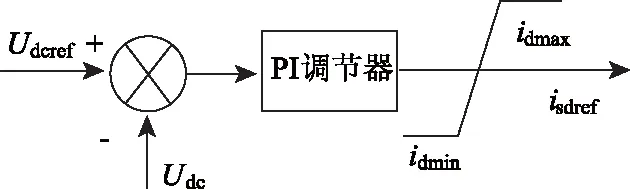
图5 外环定直流电压控制器模型
加入直流电压外环的控制结构和无功功率外环的区别在于系统传递函数的不同,二者的PI调节器传递函数和内环控制器传递函数均是相同的,如式(1)、(15)所示。当忽略开关动作及线路电阻与变流器上的功率损耗,根据瞬时功率理论可以得出以下关系式:
(22)
同时考虑到:
(23)
(24)
得到
(25)
m为换流器的调制度,将idc2以扰动量处理,得到加入直流电压外环的系统传递函数为
(26)
加入直流电压外环后整个控制的开环传递函数
(27)

2.3.2 直流电压外环控制器参数设计

(28)
除了上述的外环和内环控制器,VSC-HVDC的控制系统模型还需PSCAD/EMTDC模型库中的锁相同步环节和触发脉冲生成环节模型。
3 VSC-HVDC控制系统的校验
VSC-HVDC的参数设置为L=18.7mH,R=1.37Ω,基准频率f=50Hz,换流器开关频率f1=1 650Hz,换流器出口交流线电压ud=62.5kV,直流电压Udc=140kV,直流电容C=500μF,换流器的调制度m=0.95,则Ta=3.03×10-4。
3.1 分环节校验
在阶跃输入的条件下,分别对电流内环、功率外环、直流电压外环使用PI调节器前后的响应进行校验。
3.1.1 电流内环控制校验
考虑到电流内环要求动态响应快,选择阻尼比ξ=0.6,得到Kp=4.29,Ti=0.014。校正前后电流内环控制系统阶跃响应的比较如图6所示。由图可知,电流内环控制系统稳态误差为0,超调量为9.5%,上升时间tr=3.3Ta=0.009 9s。校正前系统存在稳态误差和上升时间长等问题,校正后系统无稳态误差,上升时间合理。
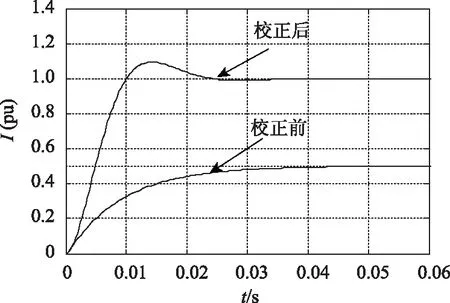
图6 校正前后电流内环阶跃响应比较
3.1.2 功率外环控制校验
选择t=0.012s,得到Kp=0.013,Ti=4.36×10-3。串联的一阶校正环节选为230/(s+230)[6]。校正前后功率外环控制系统阶跃响应的比较如图7所示。由图可知,功率外环控制系统稳态误差为0,其超调量为15%,上升时间tr=0.011s。校正前功率外环系统存在2%的稳态误差,上升时间过短,校正后系统稳态误差为0,上升时间合理。
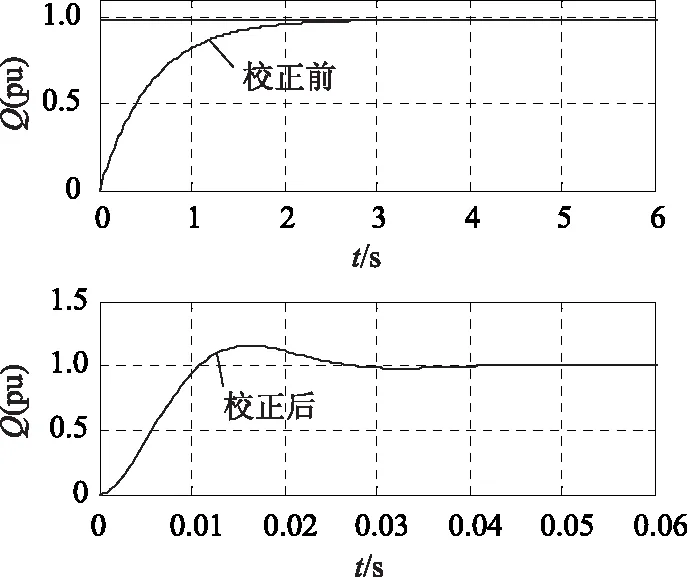
图7 校正前后功率外环阶跃响应比较
3.1.3 直流电压外环控制校验
综合典型II型系统动态响应性能和抗干扰性能,中频宽h=5是个很好的选择[7],得到Kp=0.136,Ti=0.022。校正前后直流电压外环控制系统阶跃响应的比较如图8所示。由图可知,直流电压外环控制系统稳态误差为0,超调量为37.6%,上升时间tr=0.015s。校正前直流电压外环系统的上升时间为0.000 3s,上升时间太短,调节时间较长,校正后上升时间合理,超调量较小。
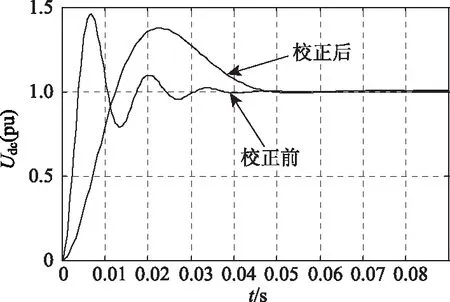
图8 校正前后直流电压外环阶跃响应比较
3.2 VSC-HVDC控制系统整体校验
在PSCAD/EMTDC中建立VSC-HVDC,参数设置如前所示。两端均为有源系统,整流侧VSC换流站采用定有功功率和定无功功率的控制策略,而逆变侧VSC换流站采用定直流电压和定无功功率的控制策略。
3.2.1 有功功率阶跃变化
从图9可以看出,当有功功率参考值在2s减小20MW时,受端和送端的实际有功功率都能迅速减小20MW以保持功率的平衡,同时直流电流变小以保持直流电压的恒定。PI调节器能迅速跟踪参考值的变化。
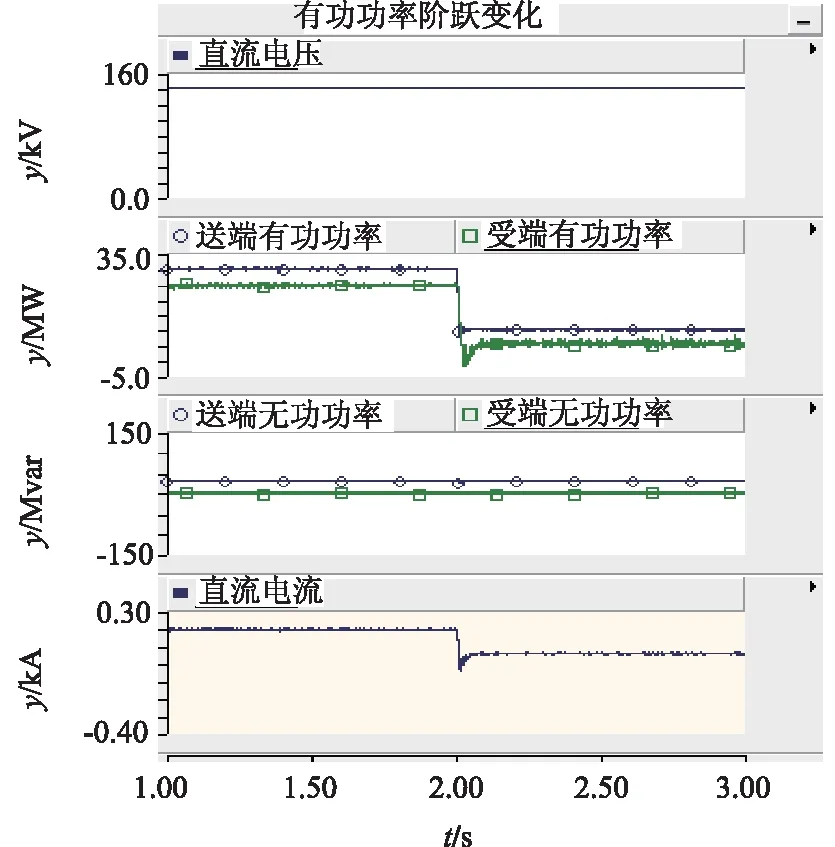
图9 有功功率阶跃变化仿真结果
3.2.2 无功功率阶跃变化
由图10可知,当送端的无功功率参考值在2s时减少20MW,而受端的无功功率在3s时减少20MW,两侧的实际无功功率值均能迅速跟踪变化参考值的变化。但是一端无功的变化对该端有功以及另一端的有功、无功均无影响,说明可以实现两端换流站的独立控制和每一侧有功、无功的解耦控制。
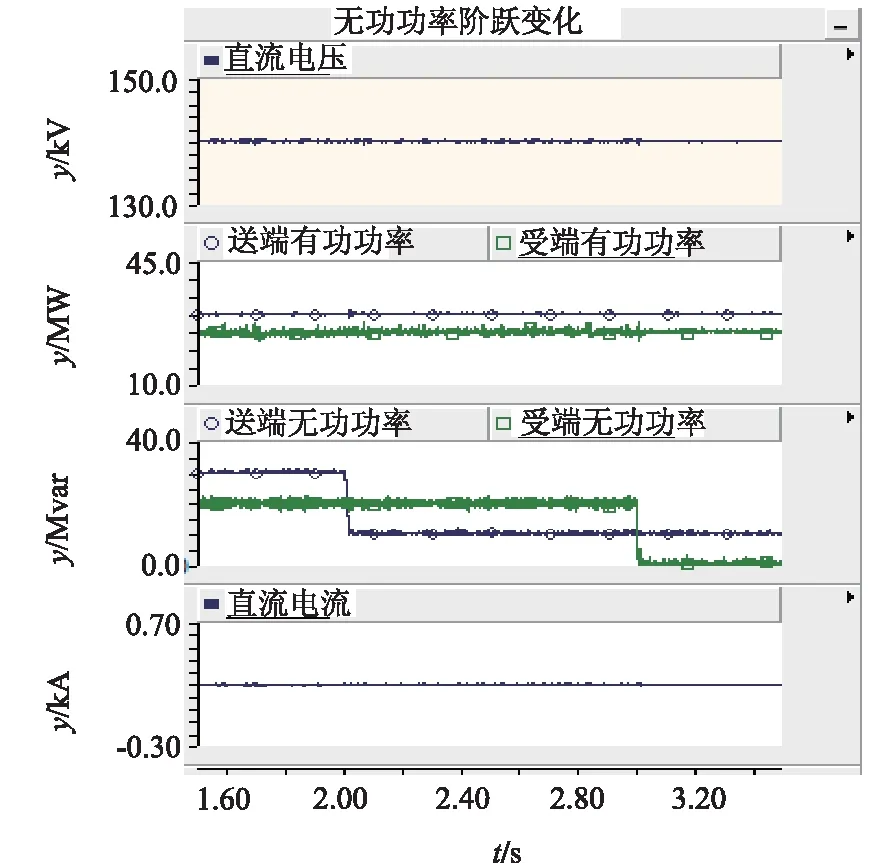
图10 无功功率阶跃变化时仿真结果
3.2.3 直流电压阶跃变化
由图11可知,当直流电压参考值在2s减小30kV时,实际的直流电压能迅速跟踪变化,同时直流电流增大以保证有功功率的恒定。直流电压的减小除了对受端的有功产生一个极小的扰动外,对受端的无功以及送端的有功、无功均无影响。
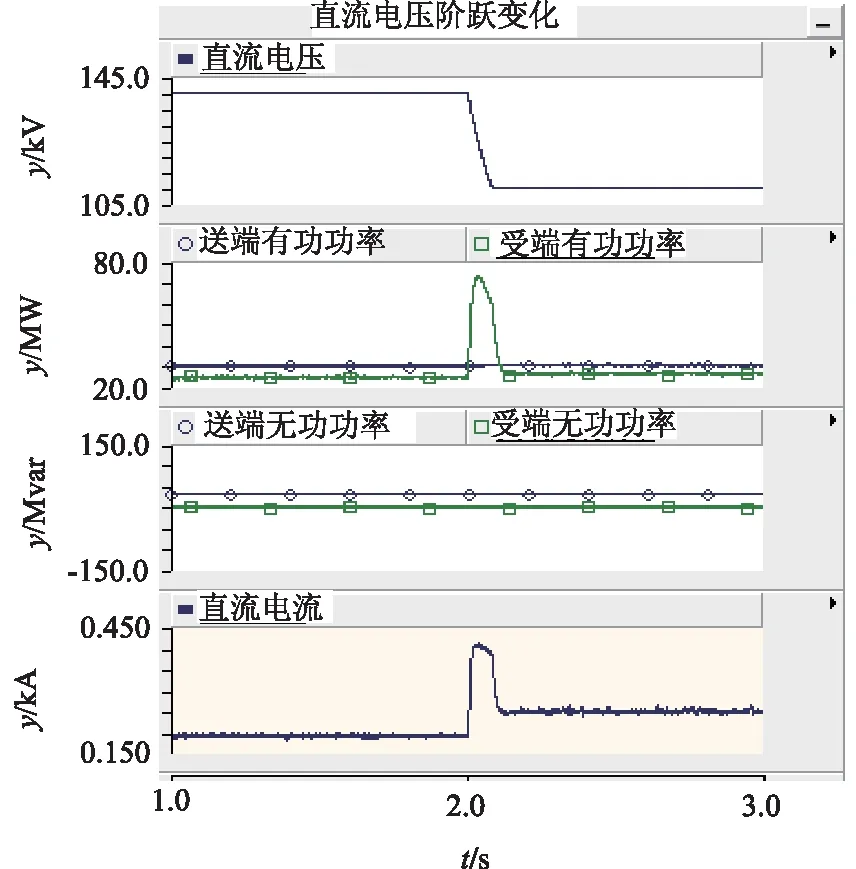
图11 直流电压阶跃变化时仿真结果
3.2.4 三相短路故障仿真
为了验证控制器的抗干扰性能,在受端换流站的交流侧输出设置三相接地短路故障。故障发生在2s,持续时间0.05s。三相短路故障时的仿真结果如图12所示。由图可知,当受端换流站的交流侧电压发生三相短路变为0时,只是对受端换流站的有功功率、无功功率、直流电压产生扰动,故障消除时,都能在0.1s~0.15s快速恢复正常运行;故障对送端的有功功率、无功功率没有明显的影响。
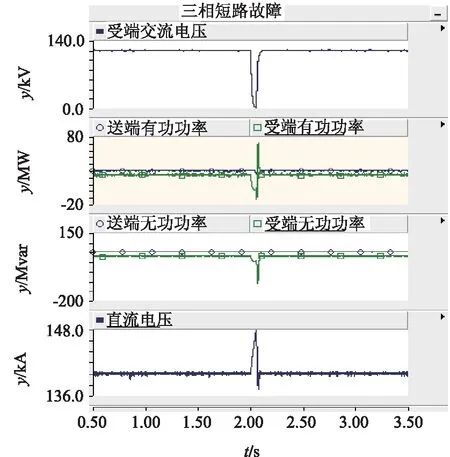
图12 三相短路故障仿真结果
4 结束语
本文针对VSC-HVDC的直接电流控制提出了一种参数整定方法,直接电流控制包括内环控制和外环控制,电流内环控制目标是:稳态误差为零,且具有快速响应能力,整定为典型的I型环节可满足要求。外环控制目标除了保证稳态误差为零和一定的响应速度,还需着重考虑其抗干扰能力。当控制系统性能要求改变时,通过选择合适的阻尼比ξ,时间t和中频带宽h就可相应地改变各环的性能以满足系统控制要求,具有较强的灵活性。
对比校正前后每个环节的阶跃响应并在PSCAD/EMTDC中仿真验证可知,依照该参数整定方法,内环、外环的实际值均可以快速、准确、稳定地跟踪参考值的变化,整个VSC-HVDC控制系统具有良好的稳态和动态性能。
[1] 徐政,屠卿瑞,管敏渊等. 柔性直流输电系统[M]. 北京:机械工业出版社, 2012.
[2] 文俊. 轻型高压直流输电——一种新一代的HVDC技术[J]. 电网技术, 2003, 27(l): 47-51.
[3] 汤广福. 基于电压源换流器的高压直流输电技术[M]. 北京:中国电力出版社, 2009.
[4] Chandra. Understanding of tuning techniques of converter controllers for VSC-HVDC [J]. Nordic Workshop on Power and Industrial Electronics, 2008.
[5] 陈伯时. 电力拖动自动控制系统[M]. 北京:机械工业出版社,2003:60-71.
[6] 冯双磊. 基于PSCAD_EMTDC的双馈式变速恒频风电机组动态模型仿真[J]. 电网技术, 2007, 31(17):30-35.
[7] 邹伯敏. 自动控制理论[M]. 北京:机械工业出版社,2007:62-87.
(责任编辑:林海文)
A Method of PI Parameters Tuning for VSC-HVDC Control System
YANG Xiaonan, CHEN Hongkun, MIAO Yun, WANG Ling, HU Wenyan, YANG Ruixi
(School of Electrical Engineering Wuhan University, Wuhan 430072, China)
High voltage direct current technology based on voltage source converter (VSC-HVDC) has such advantages as no commutation failure and no reactive power compensation. Because direct current control strategy is generally applied in VSC-HVDC, PI regulator is used for series correction in the inner current loop control, outer power and voltage loop controls. Therefore, it plays a vital role for improving control system performance if appropriate method would be utilized to design PI controller parameters. A kind of parameter tuning method is presented in this paper by considering such indexes as the steady-state error, the rising time, the anti-disturbance performance of the control system performance, by which the inner current loop, outer power and DC voltage loop are designed as classic I type link, classic first-order link and classic II type link respectively to ensure the control system having good steady-state and dynamic performance. In the end, the validity of VSC-HVDC system model is verified by PSCAD / EMTDC simulation.
VSC-HVDC; control system; PI regulator; inner current loop; outer loop
1007-2322(2015)04-0068-06
A
TM721.1
2014-07-31
杨晓楠(1991—),男,硕士研究生,研究方向为电力系统运行与控制,E-mail:944468831@qq.com;
陈红坤(1967—),男,教授,博士生导师,研究方向为电力系统运行与控制等, E-mail: chkinsz@163.com。
猜你喜欢
园林科技(2021年2期)2022-01-19
石油沥青(2021年1期)2021-01-11
电子制作(2019年11期)2019-07-04
中医眼耳鼻喉杂志(2019年2期)2019-04-13
中国微创外科杂志(2018年9期)2018-10-09
筑路机械与施工机械化(2018年1期)2018-03-06
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
