地铁车辆牵引仿真计算
2015-05-04 11:13:39胡彩凤吴能峰杨北辉
铁道机车车辆 2015年6期
何 晔, 胡彩凤 , 吴能峰, 杨北辉
(1 广州地铁集团有限公司, 广东广州 660431;2 深圳市英威腾交通技术有限公司, 广东深圳 518055)
地铁车辆牵引仿真计算
何 晔1, 胡彩凤2, 吴能峰2, 杨北辉2
(1 广州地铁集团有限公司, 广东广州 660431;2 深圳市英威腾交通技术有限公司, 广东深圳 518055)
介绍了地铁车辆仿真系统的建模和计算过程,建立了列车牵引、电制动特性模型和仿真计算模型,以基本动力性能要求和列车运行能力要求为输入,仿真得到列车牵引、电制动特性曲线,并对典型区间及实际线路进行模拟运行,通过对比分析仿真和实际运行数据,为地铁牵引系统国产化研制提供参考。
地铁车辆; 牵引、电制动特性; 仿真计算
城市轨道交通车辆牵引计算是确认牵引质量、运行速度、运行时分以及能量消耗等运营指标的重要手段,同时,也是校验新型机车牵引、电制动特性和列车通过能力的有效方法。
轨道车辆牵引计算系统要求能够根据线路纵断面条件及列车编组情况,计算列车的运行时分及各项运行指标,以评价牵引系统的性能和线路条件或编组情况变化后所产生的效果。
1 车辆动力性能要求[1]
1.1 基本牵引、电制动性能要求
在额定负载(AW2),半磨耗轮径(φ805 mm),额定电压(1 500 V)情况下:列车平均起动加速度不小于1.0 m/s2(0~35 km/h),最大运行速度80 km/h,平均加速度不小于0.6 m/s2(0~80 km/h),计算用牵引黏着系数0.16~0.18;常用制动平均减速度1.0 m/s2(80 km/h~0),计算用制动黏着系数0.14~0.16,电制动与气制动转折点尽可能低,一般应小于6 km/h(可调整),网压大于等于1 500 V时,速度从80 km/h开始到列车电制动与气制动的转折点速度,电制动能单独满足制动要求;冲击极限限制0.75 m/s3。
1.2 故障运行能力和救援能力要求
故障运行能力:(1)当一辆动车不能工作时,在AW2状态下可以保证列车运行一个往返;(2)当两辆动车不能工作时,在AW3状态下,列车可在35‰坡道上起动行驶到最近车站。
救援能力:(1)一列空载列车牵引一列超载AW3无动力故障列车能在35‰坡道上起动;(2)当一列AW0列车救援另一列AW0无动力故障列车时,能以不低于45 km/h的速度运行返厂。
2 牵引计算模型建立
2.1 牵引、电制动特性模型[2]
牵引、电制动特性模型是以电机参数为基础,以满足车辆基本动力性能为目标,根据传动比和轮径值将机车特性曲线转换成电机特性曲线,通过建立计算模型,得到不同工况下能够满足车辆基本牵引、电制动特性的特性曲线。
已知列车的牵引质量M(包括旋转质量),启动加速度a0,齿轮传动比i0,轮径D,启动阻力Rq(根据牵规取5 N/kN),电机总数m,齿轮系统传动效率ηG,计算启动牵引力Fst和电机启动转矩Tst。
(1)
(2)
牵引电动机在进行机车牵引时,一般要经历以下几个阶段:恒磁通、恒功率、恒电压和自然特性阶段。
(1) 启动阶段采用恒磁通启动方法,在励磁电流iq一定的情况下,电机的转矩与转矩电流iq成正比,此时转矩电流仅仅是转差频率fq的函数,因此已知启动转矩,即可算出启动转差频率。
(3)
根据T型等效电路对式(3)进行近似推导,得式(4)和式(5):
(4)
(5)
(6)
(7)
由此可见,只要通过闭环系统使fs保持不变,当励磁电流不变(即恒磁通)时,转矩电流为恒定值,电机保持恒转矩运行。实际上,从式(5)可知,当转差频率恒定时,要求E1/f1=常数,在频率f1较高时,因r1≤(X1+X'2),可以忽略定子阻抗压降,E1≈U1,所以只要保持U1/f1=常数即可。但在刚启动频率较低时,r1较大,需要进行定子阻抗压降补偿。启动点的转差率s=1,故在启动点,由启动转矩确定的转差频率叠加上补偿电压对应的频率即为定子启动频率。
(2) 恒转矩阶段:转差频率恒定,保持U1/f1=常数,逐渐提高定子频率,电机输出恒转矩。

(8)
(9)
(10)
2.2 仿真计算模型[4]
仿真计算是根据牵引、电制动特性结果以及线路条件,计算满足列车运行时分要求的过程。包括牵引质量计算、阻力计算、牵引、制动力计算、运动学计算、电压电流计算、能耗计算、运行控制等。
牵引质量计算是通过输入的列车和各个工况(AW0~AW3)的载客质量,以及编组情况、旋转系数等参数,计算列车实际的牵引计算质量。
列车的运行阻力包括:基本阻力W'0,启动阻力W'q,坡道附加阻力W'i,曲线附加阻力W'r,隧道附加阻力W's,坡道阻力W'j,其中基本阻力按戴维斯公式计算,其他阻力计算按照牵规中的规定进行取值。
牵引、制动力计算根据式(1)求得轮周力,通过冲击极限限制和黏着校核之后,根据式(2)转换成电机输出转矩,然后进入电机牵引、电制动特性计算模块,求得电机实际输出,再转换成实际作用的轮周力。冲击极限限制:
F为当前给定牵引或制动力,Ft为冲击极限限制输出力,αt,αt-1分别为当前加速度和Δt时间前的加速度,αL为加/减速度冲击极限限制。
运动学计算:地铁车辆编组一般较短,所以将列车简化成单一质点进行计算所产生的误差是可以接受的。通过牵引、制动力计算得到当前轮周力Ff,以一定时间步长Δt进行迭代求得当前列车运行的加速度at、速度vt、距离st,在运行过程中,速度受到线路区间限速的限制。
(11)
(12)
电压、电流计算包括牵引电机定子端电压U1和电流I1,直流侧等效电流IDC。U1和I1的计算在电机计算模型中,根据电机控制策略和T型等效电路计算。电机输出力矩通过齿轮传动比和轮径转换成对应轮周力为Fe,列车运行速度v,齿轮箱传动效率ηG、电机效率ηm、变流器效率ηv,则列车运行的电气总功率为:
(13)
若网压为UDC,变流器个数mv,则直流侧等效电流IDC为:
(14)
牵引能耗Et为:
(15)


图1 站间计算流程图
3 牵引、电制动特性曲线确定
各工况列车计算质量如表1所示,启动阻力取5 N/kN,编组为4M2T

表1 列车计算质量
3.1 牵引特性曲线
满足AW2工况下:起动加速度1.05 m/s2、平均加速度0.68 m/s2、最大运行速度80 km/h,最大牵引功率

图2 区间计算流程图
280 kW,计算得AW3~AW03种工况下牵引特性曲线如图3所示。其中AW3下的恒转矩区0~34 km/h,牵引力427.1 kN,恒功区间34~54 km/h,自然特性区54~80 km/h;AW2下的恒转矩区为0-39 km/h,牵引力381.1 kN,恒功区间39~54 km/h,自然特性区54~80 km/h;AW0下的恒转矩为0~55 km/h,牵引力265.9 kN,自然特性区为55~80 km/h。列车牵引运行时,在不超过粘着限制和冲击极限限制的前提下,电机按照此牵引特性曲线出力。

图3 牵引特性曲线
3.2 制动特性曲线
在满足最大制动减速度-1.1 m/s2,最大制动功率530 kW条件下计算得到AW3~AW03种工况下的制动力曲线如图4所示。图中显示:AW3载荷时从80 km/h制动,由于最大制动功率限制,电机进行恒功制动至速度74.5 km/h才进入恒转矩制动,最大制动力417.7 kN;AW2和AW0工况下,电机从80 km/h进入制动即可以当前载荷下要求的最大制动力进行制动,分别为371.9 kN和259.6 kN;电制动和机械制动的转换点设置在5 km/h(该值根据要求可变动)。列车制动运行时,在满足黏着限制和冲击极限限制的前提下,电机按照此制动曲线出力。
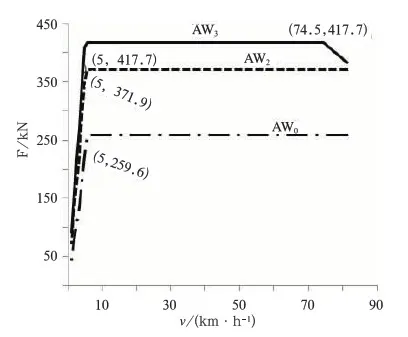
图4 制动特性曲线
4 牵引仿真计算
4.1 典型区间运行
典型区间:理想平直轨道。
图5所示为AW2工况下典型区间仿真运行和广州地铁公司试验线路段运行的“牵引、制动力~时间”、“加速度~时间”与“速度~时间”曲线。仿真计算输入:轮径840 mm(新轮),牵引黏着系数0.17,制动黏着系数0.16,冲击极限限制0.75,电制动与空气制动转换点取5,启动阻力5 N/kN。计算结果如表2所示。

表2 计算结果与实际结果列表

图5 典型区间运行曲线
由图5的曲线可见,启动的时候,实际运行的加速度比仿真加速度滞后1~2 s。产生此误差的原因主要包括以下几个方面:
(1)气制动缓解时间(只有牵引系统给定牵引力达到一定值时,空气制动控制单元EMU才发送气制动缓解指令,列车才能正式启动牵引),大约0.5 s。(2)滤波延迟时间(防止脉冲冲击),大约0.5 s。(3)加减速冲击极限限制(保证乘坐舒适度):仿真计算取值0.75 m/s3,实际控制系统取值0.5 m/s3。由此产生的时间差约为0.7 s。这3个时间累计约有1.7 s左右,这个时间差即是导致实际控制系统加速度滞后于仿真系统计算加速度的时长。
当前的仿真系统未考虑第(1)和第(2)点;第(3)点只需要在计算的时候修改“冲击极限限制”的输入值即可。
计算结果表明:忽略理想平直轨道阻力、黏着状况等线路条件与实际试验线路之间的差异,以及系统反应时间及滤波延时的误差等因素,仿真结果和实际运行结果可认为是一致的。
实际上,这个时间差在整条线路仿真计算的时候是可以忽略不计的。但是,为了使仿真系统尽可能模拟实际运行情况,后续改进应考虑将实际系统的特性(系统反应时间、滤波时间等)加入到仿真模型中。
4.2 实际线路仿真
对广州地铁8号线万盛围—同福西进行仿真,分别进行节时和节能模式的模拟运行。
仿真条件:①GZL8线路参数(坡度、海拔、限速、停站时间等,见图6);② 基本动力性能要求(见1.1节);③ 节能模式要求满足线路旅行速度不低于35 km/h。
仿真结果:数据见表3,其中S表示运行距离,T表示旅行时间,v表示旅行速度,Id表示直流侧等效电流,i1表示电机电流,E表示能耗。

图6 GZL8(万盛围-同福西)线路参数

站台节时模式节能模式S/mT/sv/(km·h-1)Id/AI1/AE/(kW·h)T/sv/(km·h-1)Id/AI1/AE/(kW·h)万胜围00000000000琶洲1828131.350.1388.4103.432.8151.443.5258.683.618.9新港东99489.340.1476.2127.629.399.436.0297.6102.413.6磨碟沙1568.6120.147.0438.8111.539.8136.441.4258.287.415.5赤岗77186.432.1467.0134.724.492.430.0303.3112.010.6客村1483.312243.8412.3109.732.6145.736.6226.980.013.7鹭江1242.4106.642.0450.1118.930.6121.436.8281.193.515.4中大1692.6125.448.6405.0104.845.9165.236.9258.182.132.9晓港1191.4102.841.7421.0116.730.0114.837.4299.097.121.2跃进村669.794.725.5543.5144.426.499.824.2343.6120.011.7昌岗中路84288.434.3478.1132.725.395.931.6320.6111.716.7沙园1052.199.838.0490.9126.932.3111.534.0254.195.711.2凤凰新村833.986.734.6503.8134.227.293.932.0321.4110.812.0同福西80487.433.1493.3134.627.394.930.5306.5111.012.9
(1) 运行里程:14 973 m
(2) 运行时间(含停站时间):节时模式1 340.8 s、节能模式1 522.6 s
(3) 旅行速度:节时模式40.2 km/h、节能模式35.4 km/h
(4) 单位能耗:节时模式26.97 kW·h/km、节能模式13.77 kW·h/km
(5) 直流侧等效电流:节时模式453.0 A、节能模式281.4 A
(6) 电机等效电流:节时模式121.1 A、节能模式96.6 A
节时模式的牵引力、速度、加速度与距离的关系和直流输入功率、输入电流、电机电流与时间的关系曲线如图7、图8所示。
4.3 救援能力校验
(1) 一辆动车故障,AW2载荷,运行一个往返结果:运行里程29 946 m、运行时间(包括停车和往返时间)2 969 s、旅行速度36.3 km/h。

图7 直流功率、直流电流、电机电流—运行时间(节时模式)
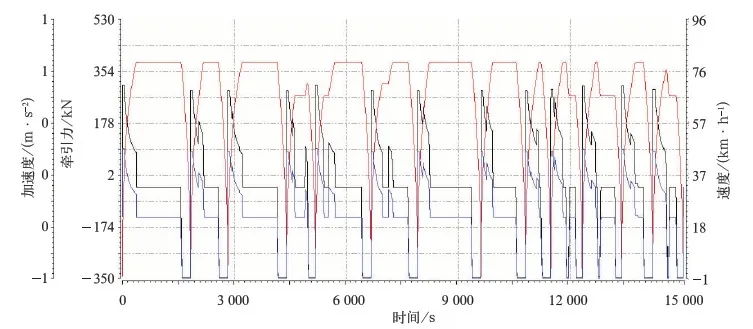
图8 牵引力、速度、加速度—运行距离(节时模式)
(2) 两辆动车故障,AW3载荷,35‰坡度启动结果:启动牵引力212.4 kN、启动阻力151.5 kN、牵引质量386.5 t、剩余加速度0.158 m/s2,可以正常启动。
(3) 一列AW0牵引一列AW3无动力车,35‰坡度启动结果:启动牵引力442.7 kN、启动阻力245.2 kN、牵引质量625.4 t、剩余加速度0.316 m/s2,可以正常启动。
(4) 一列AW0牵引一列AW0无动力车返厂结果:运行距离:14 973 m、运行时间(中途不停车):762.2 s、最大加速度0.52 m/s2、平均加速度0.46 m/s2、旅行速度70.7 km/h。
5 结束语
通过对牵引电机控制和地铁车辆运行进行建模,得到牵引、制动特性曲线,并以此为基础,对典型区间和广州地铁8号线进行了仿真计算,计算结果和实际运行结果基本吻合,说明所建模型有效,其计算结果对牵引系统国产化研制具有一定的参考价值。
[1] 张 宇.深圳地铁1号线(续建)车辆牵引仿真计算[J].电力机车与城规车辆,2008,31(5):12-15.
[2] 李 伟,韩 力,李 辉.逆变器供电异步牵引电动机电磁设计与特性计算[J]. 微特电机,2006,(4):14-47.
[3] 李益丰,高培庆,谷细凤.逆变器供电的异步牵引电机特性曲线的计算[J]. 机车电传动,1997,(6):8-11.
[4] 谢宏诚,乌正康,谢维达.城市轨道车辆牵引仿真计算[J].电力机车与城轨车辆,2005,28(5):20-22.
Simulation Calculations of Metro Tractions
HEYe1,HUCaifeng2,WUNengfeng2,YANGBeihui2
(1 Guangzhou Metro Croup Co.,Ltd., Guangzhou 660431 Guangdong, China;2 Shenzhen INVT Transportation Systems Co.Ltd., Shenzhen 518055 Guangdong, China)
The paper introduces the modeling and simulation calculation of metro tractions, a traction & electric braking model and a simulation calculation model were established. The tractions characteristic curve and the brake characteristic curve were obtained by setting the dynamic performance requirements and the train running capacity requirements as input. It provides reference for localization of metro vehicle traction system, by comparing the results of simulation and the real running parameter.
metro vehicle; traction & brake characteristic; simulation calculation
1008-7842 (2015) 06-0063-06
男,教授级高级工程师(
2015-07-02)
U239.5
A
10.3969/j.issn.1008-7842.2015.06.17
猜你喜欢
昆明医科大学学报(2021年12期)2021-12-30 07:00:16
英语文摘(2020年10期)2020-11-26 08:12:12
四川冶金(2018年1期)2018-09-25 02:39:26
中学生数理化·八年级物理人教版(2018年3期)2018-05-31 08:52:46
中国化肥信息(2018年3期)2018-01-30 06:56:43
知识经济·中国直销(2017年3期)2017-04-16 03:07:53
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
现代企业(2015年4期)2015-02-28 18:48:39
中国卫生(2014年11期)2014-11-12 13:11:14