现行三类平台航磁勘查系统特点及勘查效果评述
2015-05-03 03:59崔志强胥值礼孟庆敏高卫东
物探化探计算技术 2015年4期
崔志强, 胥值礼, 孟庆敏, 高卫东
(中国地质科学院 地球物理地球化学勘查研究所,廊坊 065000)
现行三类平台航磁勘查系统特点及勘查效果评述
崔志强, 胥值礼, 孟庆敏, 高卫东
(中国地质科学院 地球物理地球化学勘查研究所,廊坊 065000)
航磁勘查系统是航空磁力仪器与飞行器的结合体,其经济高效的特点,已获得了广泛地认识。以固定翼、直升机、无人机为平台构成的航磁系统,是现行三类主要的航磁勘查系统。这里分别描述了这三种平台航磁勘查系统的自身特点,介绍了各自的优越性和存在的不足。又从各自获取的测量数据质量方面和不同系统在同一地区的成果进行详细比对,分析了各系统的适应性。为今后开展航磁勘查工作中,根据项目实际条件,正确合理的选择不同平台构建的航磁勘查系统提供参考,能提高工作效率,获取更高质量的原始数据。
航磁勘查系统; 固定翼; 直升机; 无人机; 勘查效果
0 引言
航空磁力测量(简称航磁测量)是将航空磁力仪及其配套的辅助设备装载在飞行器上,在测量地区上空按照预先设定的测线和高度,对地磁场强度或梯度进行测量的地球物理方法。现在航磁测量是基础性和公益性地质调查、战略性矿产勘查的重要手段,是地质勘查现代化的标志,在国民经济建设中发挥着重要作用,可为矿产资源与油气资源调查评价、海洋地质调查、地下水勘查、工程地质、基础地质与研究等提供信息和解释成果[1-2]。与地面磁测相比,具有测量精度高,效率高,且不受水域、森林、沼泽、沙漠和高山的限制。同时由于飞行是在距地表一定的高度进行的,从而减弱了地表磁性不均匀体、地表人文干扰等影响,能够更加清楚地反映出包括具有一定深部地质体的磁场特征。
航磁勘查系统是航空磁测仪器与飞行器相结合的一个综合物探勘查系统。随着科学技术地不断发展,航空磁测仪器及其配套设备的使用和飞行器的应用都取得了很大的进步,如高精度、高采样率的磁测设备,静态噪声已经达到1 ‰ nT以内,高精度的卫星导航定位系统的接入,平面定位精度在1 m内,飞行控制软件的使用,有效地提示飞行器沿预定的高度和线路飞行,以及与多种飞行器的组合应用,构建了现在的多种航磁勘查系统。航磁设备也由早期的重量大体积大,向小型化轻量化发展,从几十公斤的大体积设备进化到几公斤,现最轻已达到2公斤左右。这就更适合与多种飞行器结合,组成多种航磁勘查系统[3-4]。现行国内使用的主流航磁勘查系统主要包括以固定翼为搭载平台的航磁勘查系统,以运12平台为代表(以下简称“固定翼航磁勘查系统”);以直升机为搭载平台的航磁勘查系统,以小松鼠B3直升机为代表(以下简称“直升机航磁勘查系统”);以无人机为载体的航磁勘查系统,现国内应用较为成熟的有国产小型彩虹-Ⅲ型无人机(以下简称“无人机航磁勘查系统”)。作者对三类航磁勘查系统的特点及勘查效果进行研究。
1 不同平台的航磁勘查系统特点
固定翼航磁勘查系统历史悠久,航空物探最早是从固定翼飞机平台发展而来,经历了多个阶段,使用过的固定翼机型较多,主要有运5,、运11、运12、赛斯纳208、奖状Ⅱ等。近年来主要运用运12(Y-12)型开展较大面积的勘查工作。

图1 Y12型固定翼航磁勘查系统
运12型飞机属于小型运输机,内部空间大,其固定翼尖和尾翼都可作为磁测仪器安装部位,同时兼备低空飞行能力[6]。因此现在作为多种航空物探技术的首选飞行平台,该类航磁系统主要具有以下特点,①固定翼飞机具更大的有效载荷,早期的航磁测量仪器设备大、探头体积较大,而且飞行过程中还需要承载飞行员及空中仪器操作员,通常总重量达100 kg~200 kg不等;②仪器安装及飞机改装较容易且方案较灵活,其宽大的内部空间,稳定的固定翼尖和尾翼,对安装航空磁力仪探头灵活,对飞机的改动小,易于加工,以及获得试航取证和飞行操作。图1(a)为安装在尾部的磁探头,图1(b)为安装在翼尖和尾部的航磁梯度探头,都能够有效的避开发动机及螺旋桨产生的电磁涡流干扰。而且现在高精度航磁系统还包括雷达高度仪、GPS导航天线等,这些设备需要安装在飞机主体外部,固定翼飞机都能提供灵活的方案;③保持飞行姿态稳定或缓慢流畅的变化对获取高质量航磁数据也至关重要。现在以Y12型飞机为代表的固定翼飞机具有飞行控制能力较强,飞行姿态稳定、飞行速度较低、适应低空飞行,这都满足了航磁测量的规范要求;④航磁勘查较地面磁测的优势是快速高效,固定翼飞机在保证仪器和空乘人员的重量外,还能提供大油量,能够大大的延长单架次的航时,从而能够有效的提高航磁测量的工作效率。
除此之外,固定翼航磁勘查系统也具有一些不足之处,①必须借用现有机场起降,起降航空协调难度大;②机场到测区的无效航路时间多,增加了成本,降低了工作效率;③深切割山区,飞行高度控制难度大,难以达到规范要求;④长时间低空飞行空乘人员容易疲劳,产生安全隐患;⑤不宜在小面积范围内开展大比例尺勘查工作等。
直升机航磁勘查系统,从上个世纪八-九十年代开始有使用。现今以小松鼠B3型航磁勘查系统最为典型,选用其组合成为航磁勘查系统,主要缘于其具备机动灵活、有效载荷大、航程长、爬升能力强、升限高等特点(图2)。①其灵活机动的特性,能最大限度根据需要控制航速、飞行高度、飞行速度等。降低飞行高度对提高航磁数据质量至关重要,特定的飞行大比例尺需要在特定的飞行高度范围内开展工作[7]。降低飞行速度能够提高数据点采样密度,从而发现更小的异常。大角度转弯以及空中悬停是直升机的特性,这在实际工作中操作性更强,同时也提高了飞行安全系数;②可搭建临时起降点,不需要借用机场。可在测区内或周围就地起降,能够根据工作进度不断的变换基地,减少航路开销。特别是在重点区域开展小面积的大比例尺高精度测量方面优势尤为明显。
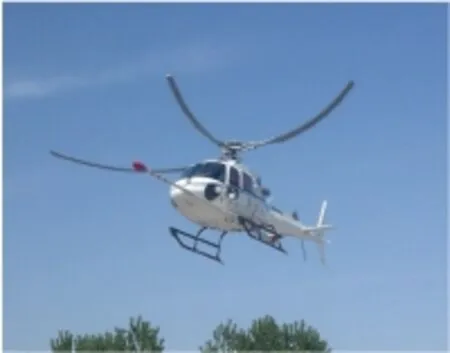
图2 小松鼠B3型直升机航磁勘查系统
源于直升机的特性,其作为航磁勘查系统也存在一些不足,如体积小、内部空间狭窄,可提供的仪器安装方案少,现最常用的是采用安装硬质探杆,航磁探头固定在向前伸出主桨范围探杆前端;干扰强、高频震动剧烈,发动机、主桨及尾桨的干扰基本覆盖了整个机身,特别是主桨在飞行中会产生较强的震动,另外,较长的硬质探杆在飞行中也会受气流影响产生晃动,在测量数据上表现为数据噪声较大、数据处理及调平工作量加大等。
无人机航磁勘查系统是近年刚发展起来的,国内最早无人机航磁系统出现于2010年,最初是应用航模改装的航模型无人机,2013年才开始进入真正的无人机航磁勘查系统研发与应用[8]。现成功完成区域性测量的是,由物化探所联合中国航天空气动力技术研究院研制的彩虹-3型中型无人机航磁勘查系统(图3)。

图3 彩虹-3型无人机航磁勘查系统
开展无人机航磁勘查系统研究,主要缘于其费用低、效率高、可预期的高精度数据、低噪声水平、高空间分辨率以及无人员伤亡等优势。鉴于这些优点,无人机航磁系统的研发力度和进展非常大。现今已先后攻克了无人机航磁勘查系统的仪器与飞机之间的集成、飞机改装、电磁信号屏蔽;超低空地形跟随飞行控制技术,能够自主或交互飞行、避让障碍物;夜航测量能力,这是前固定翼和直升机无法具备的,夜间测量能够减少来自地面的人类活动产生的电磁干扰信号,以及海事卫星远程测控技术,能够在几十百公里之外的地方对无人机实行操控,为开展面积的勘查提供了技术保障。这些关键技术的成功,大大提高了无人机航磁勘查系统的数据质量和开展勘查工作的优势。
其不足之处,受现今民用无人机的自主导航技术限制,主要表现在障碍物的自动识别及规避、沿地形起伏的三维航线适时自动规划、链路通视技术、数据加密保护及传输以及制定标准化的工作流程等方面还需要进一步开展研究工作。
2 勘查效果评述
在使用相同高精度磁力仪的情况下,仪器测量精度、采样率以及导航定位精度都相同,上述三类航磁勘查系统获取的航磁数据具有各自的特点,勘查效果也存在一定的差异,这主要缘于系统平台本身的特点所致。我们从使用这三类航磁勘查系统所获取的数据分别介绍它们的数据特点,和同一地区不同勘查系统之间数据的对比。
需要特别说明,由于各系统的磁补偿精度和测区地形情况是影响原始测量数据质量的重要因素。因此分别介绍一下各类系统航磁补偿精度和测区地形情况。图4为以Y12为平台获取的固定翼航空磁测对比图,航磁补偿精度为0.061 nT,位于内蒙境内某沙漠平原区;图5为以小松鼠B3直升机为平台获取的直升机航空磁测对比图,航磁补偿精度为0.074 nT,位于湖南境内某低山区;图6为以彩虹-3型无人机为平台获取的航空磁测对比图,航磁补偿精度为0.027 nT(无人机干扰小,补偿动作标准,补偿精度高),位于黑龙江境内某丘陵区。三个测区的测量比例尺均为1∶50 000,测线间距为500 m。数据均是各架次数据进行各项校正后汇总,绘制的调平前原始数据(a)和调平后成果数据(b)的对比图。
从整体来看,原始数据质量从直升机、固定翼到无人机越来越好,特别是无人机航磁系统原始数据与成果数据基本一致(图6),除了背景场有细微变化,局部异常细节基本相同,甚至难以分辨那个是原始数据,调平前总精度为2.50 nT,调平后总精度更是在1.77 nT,完全满足现有航磁规范小于3 nT的要求。而固定翼和直升机的原始数据均不同程度地存在沿测线方向的不规则条带干扰,图4显示的Y12固定翼航磁原始数据条带较弱,只在磁场低缓区域条带反映明显,其原始数据总精度为7.52 nT,调平后为2.45 nT。而图5的直升机航磁数据条带最为严重,调平前磁场区域场面貌较模糊,异常不清晰,其数据调平前后总精度分别为22.57 nT和2.14 nT。虽然通过切割线调平及二维精细调平后数据质量都能满足现行航磁规范要求,但从调平前和调平后的改善率不难看出,直升机系统的原始数据质量较差,数据调平难度大、耗时多。这种沿测线方向的条带干扰主要是由于固定翼和直升机的机身及螺旋桨产生的较大涡流在不同飞行方向产生的干扰磁场所导致的。而且直升机系统的硬架探杆较长,飞行过程中的摆动和高频震荡强烈,产生规则干扰和随机干扰,使原始数据噪声水平较大,增加了调平难度。

图4 Y12固定翼航磁原始数据与调平后数据对比图

图5 小松鼠B3直升机航磁原始数据与调平后数据对比图
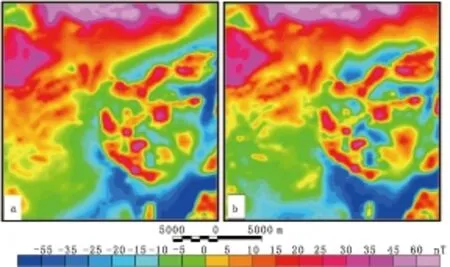
图6 彩虹-3型无人机航磁原始数据与调平后数据对比图
从同一地区不同航磁勘查系统成果数据的对比,能更直观地反映出各系统的勘查效果。图7展示了南方某钨锡钼铋多金属矿床上早期Y12型固定翼航磁系统和近期小松鼠B3直升机航磁系统勘查成果的剖面平面对比图(成图参数一致)。可以明显看出,直升机航磁系统的成果数据中显示的局部异常更多、强度更大,蕴含的地质及找矿信息更加丰富。而这都源于直升机勘查系统的平均地速是150 km/h,平均飞行高度能有效地控制在90 m~110 m之间,而固定翼勘查系统的平均地速是220 km/h,平均飞行高度在200 m以上。不难看出,对于高精度航磁勘查来说,要获得高质量的数据,除了采用较高的采样率,还应保持较低的飞行高度[9],这方面直升机较固定翼具有明显的优势。
图8是Y12型固定翼和彩虹-3型无人机航磁勘查系统在北方某铜铅锌矿床上的勘查成果对比图(成图参数相同)。无人机系统在该矿区完成了2 000 km的测量工作,平均飞行高度120 m,飞行速度160 km/h,共飞行3个架次(仪器状态及精度与图6相同)。固定翼系统(仪器状态及精度与图4相同)的飞行高度为100 m,飞行速度为220 k/h。总体上看,无人机系统数据质量与同期开展的Y12型固定翼航测成果相当,甚至更好。两图中对比标注的三个椭圆形区域显示,在固定翼系统成果资料上反映很弱甚至没有,一定程度上表现出无人机航磁优于固定翼测量成果,并且本次无人机航磁系统是在夜间完成飞行,有效地降低了来自地面矿山采矿电磁干扰,有人机无法实现夜间飞行。与有人机相比,无人机沿设计测线飞行的导航完全靠计算机进行,导航定位能力更强,飞行姿态更加稳定,更适宜开展小面积大比例尺的重点成矿区段的勘查任务。

图7 Y12固定翼与直升机航磁勘查成果对比图

图8 Y12固定翼与彩虹-3无人机航磁测量成果对比图
虽然我们还尚未直升机工作区域重新开展无人机系统的对比试验,但从无人机与固定翼系统和直升机与固定翼系统勘查成果的对比中,已经能够较为清晰地反映出这三种平台的航磁系统特点及其勘查效果。
3 结论
随着科技地不断进步和地质找矿地不断深入,对地质勘查技术的要求也越来越高,工作的地区条件也越来越艰苦。航空磁测作为一种快速经济的高精度磁法勘查手段,受地面条件制约弱,正越来越受重视。但各类平台的航磁勘查系统都有自身的特点,要高效、安全、高质量的获取原始数据,完成既定目标任务,应综合考虑探测目标体、测区的位置、地形条件等,制定测量比例尺、测量精度、飞行高度、飞行方法等技术方案,进而选择适合的搭载平台开展工作。
在长期从事航空磁测工作经验,有以下基本规律:① 在小面积开展大比例尺、高分辨率、高精度的地质详查工作时,可选择直升机和无人机系统,其机动灵活和轻型化的飞行控制平台更便于操控,对起降场所要求较低;② 在高山区、高原、荒漠无人区、中高山区等地,开展面积性的中-大比例尺的高精度航磁勘查工作,可选用性能优越的固定翼飞机或直升机为平台的勘查系统,固定翼系统虽然需要固定的机场,但其总装及控制技术难度较低,系统更稳定。直升机系统虽然航程较短,但在实际工作中可以根据测量进度,不断变化作业基地,以提高工作效率,虽然直升机系统较固定翼系统成本稍高,但能获取细节更加丰富的原始数据,对找矿工作更为有利。
近年来随着通用航空产业的发展及户外极限运动的兴起,航空物探不断尝试应用动力滑翔翼、热气球、飞艇等方式开展航磁勘查工作,这些平台适合于更小范围的勘查任务。相比而言,这些平台的勘查效率很低,飞行稳定性差,数据噪声大,不利于开展大比例尺的高精度测量工作。
今后的的地质矿产勘查工作将向攻深找盲、高精度高分辨率方向发展。航空物探作为地质找矿先行者,其技术也将向着提高对探测目标的分辨能力和探测深度的方向发展。航空物探的进一步发展,将为国民经济建设作出更大贡献。
[1] 熊盛青.发展中国航空物探技术有关问题的思考.中国地质,2009,36(6):1366-1374. XIONG SH Q.The strategic consideration of the developmentof China's airborne geophysical technology.Geology in China,2009,36(6):1366-1374.(In Chinese)
[2] HITOSHI MORIKAWA,SATOSHI TOKUE,YUMIKO OGURA. A development of airborne survey of gravity and magnetics on an unmanned helicopter and its data processing. Japan Geoscience Meeting,2013.
[3] SHIN'YA SAKANAKA, MINORU FUNAI, HIGASHINO SHIN-ICHIRO, et al. Aeromagnetic survey by a small unmanned airplane over northern part of Deception Island. Japan Geoscience Meeting,2013.
[4] BAOGANG ZHANG, ZIQI GUO,YANCHAO QIAO. A simplified aeromagnetic compensation model for low magnetism UAV platform, 2011 IEEE, IGARSS 2011.
[5] 杨光庆,石青云,于百川.中国航空物探的现状和发展.地球物理学报,1994,37(1):367-377. YANG G Q,SHI Q Y,YU B CH.Status and development of airborne geophysical exploration in China.Acta geophyscial sinica, 1994,37(1):367-377.(In Chinese)
[6] 李飞,孟庆敏,丁志强,等.Y-12航空物探综合站野外飞行工作中一些重要问题的探讨.地质与勘探,2011,37(3):423-431. LI F,MENG Q M,DING ZH Q,et al.On some issues of the Y一12 airborne geophysical in tegrated system during survey flights.Geology and Exploration,2011,47(3):423-431. (In Chinese)
[7] 熊盛青,于长春,王卫平,等.直升机大比例尺航空物探在深部找矿中的应用前景.地质科学进展.2008,23(3):270-275. XIONG SH Q,YU CH CH,WANG W P,et al. Large scale aero geophysical survey with helicopter and its appfication to deep ore prospecting. Advances in earth science. 2008,23(3):270-275. (In Chinese)
[8] 李军峰,李文杰,秦绪文,等.新型无人机航磁系统在多宝山矿区的应用试验.物探与化探,2014,38(4):846-850. LI J F,LI W J,QIN X W,et a1.Trial survey of a novel UAV-borne magnetic system in the Duobaoshan ore district.Geophysical and Geochemical Exploration,2014,38(4):846-850.(In Chinese)
[9] 薛典军.航磁测量中飞行高度质量控制方法技术.物探与化探.2001,25(4):253-258. XUE D J. The technique for controlling flying altihjde quality in aeromagnetic survey. Geophysical and Geochemical Exploration.2001,25(4):253-258. (In Chinese)
Review on exploration effect and characteristics of aeromagnetic survey system based on current three types flying-platform
CUI Zhi-qiang, XUZhi-li, MENG Qing-min, GAO Wei-dong
(Institute of Geophysical and Geochemical Exploration,CAGS,Langfang 065000,China)
Aeromagnetic survey system is combined with the airborne magnetic instrument and aircraft. The economic and efficient characteristics has been widely recognized. There are three main kinds of aeromagnetic exploration system based on the fixed wing and helicopter and unmanned aerial magnetic system currently.. Firstly, the characteristics of the three kinds of aeromagnetic survey system were described and their respective advantages and shortcomings were introduced in this paper. Secondly, the measurement data of the respective quality were introduced compared with the exploration results in the same area of different systems. At the same time, the adaptability of each system were pointed out. Finally, according to the actual working conditions of the project, how to choose the proper exploration system in field was given by this paper.
aeromagnetic survey system; fixed wing; helicopters; UAV; exploration effect
2014-08-18 改回日期:2015-06-16
中国地质调查局项目(12120115039501);中国地质调查局项目(1212011087006)
崔志强(1981-),男,硕士,从事航空物探技术及研究工作,E-mail:cuizhiqiang@igge.cn。
1001-1749(2015)04-0437-07
P 631.2+22
A
10.3969/j.issn.1001-1749.2015.04.05
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
矿产勘查(2020年5期)2020-12-25
机械工程与自动化(2020年4期)2020-08-25
电子制作(2019年7期)2019-04-25
森林工程(2018年4期)2018-08-04
河北地质(2017年2期)2017-08-16
航天工业管理(2017年4期)2017-05-12
航空模型(2016年10期)2017-05-09
光学精密工程(2016年4期)2016-11-07
河北地质(2016年3期)2016-04-23