
基于模糊PID控制倾转旋翼飞行器载重分析
2015-04-29 14:40:55骆博张舒瑜
工业设计 2015年11期
骆博 张舒瑜
摘 要:倾转旋翼飞行器共有三个飞行模式,分别是直升机飞行模式、过渡飞行模式和固定翼飞行模式,本文主要是研究直升机飞行模式。国内目前研究直升机飞行模式,主要是针对其垂直起降阶段利用经典PID控制进行控制系统设计。
直升机模式的主要优点是悬停载重,这是固定翼机不具备的。目前国内多采用经典PID作为直升机模式控制方法,而经典PID控制具有固有缺陷导致控制系统鲁棒性不强,悬停载重需要系统的抗干扰能力,所以对传统控制系统采取新的控制方法尤为必要。
关键词:倾转旋翼飞行器;模糊自整定PID控制;控制系统设计
倾转旋翼机是一种同时具备直升机和固定翼机优点的新型飞行器。从性能上看,它可以像直升机一样不依赖地形垂直起降,同时它也可以拥有固定翼飞行器的高航速。从结构上看,位于其机翼末端的短舱会随着其飞行模式的改变而转动,这使得飞行器成为一个时变非线性的系统,其控制系统的设计是倾转旋翼飞行器研究的基础和难点。倾转旋翼飞行器以其优越的性能和设计难度上的挑战,成为各国研究的热点。本文基于模糊自整定PID控制原理,在MATLAB上建立了三个姿态通道以及三个位置通道中模糊自整定PID控制的子模块部分。采用双环控制器结构,设计出三个姿态通道控制率。采用双回路控制结构,设计出倾转旋翼飞行器位置控制率。对倾转旋翼飞行器直升机模式控制器进行仿真研究,主要是:改变质量参数,对飞行器悬停模式的载重情况进行分析。
1 模糊自整定子模块设计
模糊自整定PID,是指人们运用模糊数学的基本理论和方法,把规则条件、操作用模糊集的方式表示出来,并把这些模糊控制信息(如评价标准、初始PID参数等)作为规则存入计算机控制库中,然后计算机根据控制系统的实际响应情况结合之前存储的模糊规则进行调控,从而自动实现PID参数的最佳调整。
模糊自整定PID是通过找出三个参数(Kp、Ki、 Kd)与e和 ec之间的模糊关系,并实时在线监测 和 。根据不同时期e和ec对控制参数的要求,实现模糊推理对三个参数的修改,得到三个参数的修正量,从而实现参数自整定的需求。
选择姿态角中俯仰角的模糊子模块建立为例。俯仰角的偏差和姿态角速度的偏差作为模糊PID控制器的输入,选取对Kp,Ki, Kd三个参数的调节量△Kp,△Ki,△Kd作为输出,可以根据输入输出设定模糊逻辑板块。
我们可以知道语言变量是:e,ec,△Kp,△Ki,△Kd,设定其论域为:{-3,+3}。选取{负大(NB),负中(NM),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)}为描述系统变量,得到系统子集{NB,NM,NS,Z,PS,PM,PB}。变量隶属函数选择为:左边正弦型函数,中间三角型函数,右边正弦型函数的组合函数形式。然后对模糊规则进行设定,共有49条。
通过模糊规则在模糊系统编辑器中可以建立模糊系统,设定完模糊逻辑部分,再设定PID控制部分选取初始参数为Kp=10, Ki=0.005,Kd=0.25
2 控制系统设计及载重仿真分析
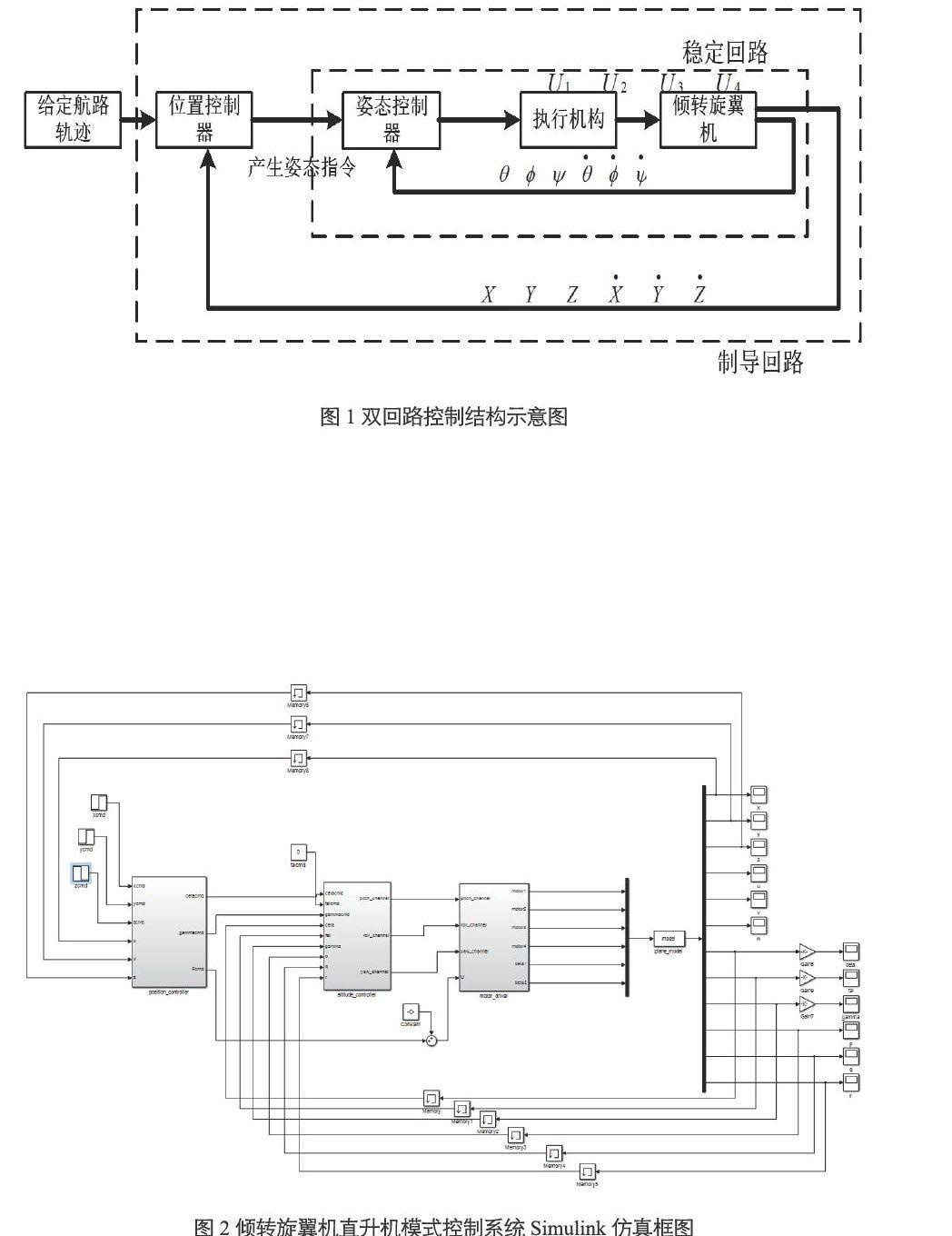
对于倾转旋翼机直升机模式位置控制律的设计主要是采用两个回路的设计,它们分别是:稳定回路和制导回路,如图1所示。
图1双回路控制结构示意图
稳定回路主要起到稳定和控制无人机姿态的作用。其采用双环控制结构,内环为角速度反馈,对扰动起到快速控制的作用;外环为角度反馈。在设计程序上,由内向外,先设计好内环,再设计外环。分析外回路时,内回路用比例环节表示稳定回路;分析内回路时,考虑到内外回路带宽差别较大,所以不考虑外回路影响。
图2倾转旋翼机直升机模式控制系统Simulink仿真框图
图3倾转旋翼机直升机模式载重仿真分析
制导回路主要起到稳定和控制无人机运动轨迹的作用。制导回路的控制方法是:首先计算当前位置与目标位置的方位差,而后计算方位差对应的姿态变化,再由姿态控制器对姿态调整,以及加速度部件进行速度调整,最后达到轨迹调整的目的。
采用Matlab的Simulink模块结合S函数的方式,根据原理图1,可以设计出姿态回路仿真框图和位置回路仿真框图,如图2所示。其中姿态回路是稳定回路,而位置回路是制导回路,单一对稳定回路进行控制可以得到姿态角仿真,而将稳定回路和制导回路结合仿真可以得到位置仿真。
控制目标:将原函数中质量参数(质量和转动惯量)改为原大小的1.5倍、2倍、3倍。目的:测试直升机模式下无人机载重能力。仿真曲线如图3所示。
从曲线中可以看到:随着参数的增大,系统响应速度变慢,最大超调量变大,但是曲线最终均能稳定在原曲线位置。
3 结语
本文设计了倾转旋翼飞行器直升机模式下的控制系统,控制系统包括三个姿态控制以及三个位置控制。通过仿真可以看到飞行器在直升机模式具备一定载重能力,控制系统相对传统控制系统在鲁棒性、稳定性、反应速度上有所提高。下一步会针对飞行器过渡飞行模式展开研究。
参考文献:
[1]Mendel J M. General Type-2 Fuzzy Logic Systems Made Simple: A Tutorial[J]. IEEE Transactions on Fuzzy Systems, 2014,22(5):1162-1182.
[2]Mendel J M, Liu X. Simplified Interval Type-2 Fuzzy Logic Systems[J]. IEEE Transactions on Fuzzy Systems, 2013,21(6):1056-1069.
[3]周进,张东升,梅雪松,等.基于虚拟样机技术倾转四旋翼飞行器联合仿真[J].计算机仿真.2015(01):94-98.
[4] 王晓明,许天鹏.基于MFAC-PID的锅炉汽包水位控制[J].中南大学学报: 自然科学版.2013(S1):52-57.
[5] 李炜,张寰,蒋栋年.一种基于MFAC外环补偿的非线性LS-SVM逆系统数据驱动控制方法[J].兰州理工大学学报.2013(02):66-69.
[6] 吴成富,刘小齐,袁旭.四旋翼无人机建模及其PID控制律设计[J].电子设计工程.2012(16):68-70.
