
飞机下滑定高控制GUI设计与仿真实验
2015-04-27 01:12曲东才卢建华谢孔树
实验室研究与探索 2015年10期
曲东才, 卢建华, 谢孔树
(1. 海军航空工程学院 控制工程系,山东 烟台 264001;2. 91515部队,海南 三亚 572016)
飞机下滑定高控制GUI设计与仿真实验
曲东才1, 卢建华1, 谢孔树2
(1. 海军航空工程学院 控制工程系,山东 烟台 264001;2. 91515部队,海南 三亚 572016)

为提高控制系统结构设计的高效性及其控制规律实验室仿真验证的直观性,设计一个图形用户界面(GUI)实现对所设计控制系统结构的显示、控制规律参数的输入、调整及控制性能的输出是一种重要途径,也是节约实验成本、提高学员学习兴趣、培养其分析问题和解决问题能力的重要举措。为此基于Matlab提供的GUI程序开发环境Guide及其自身的Simulink仿真建模功能,以飞机下滑定高控制方案为例,设计了该方案的GUI,并基于所设计的GUI对该方案实现了仿真验证。仿真验证表明,该GUI层次分明、简洁方便、功能多样,可方便、快捷的对所设计控制方案的仿真研究。
下滑定高控制; 轨迹设计; PID; GUI设计与实现
0 引 言
飞机下滑定高控制系统是飞机着陆和定高飞行的一种重要功能系统,一般着陆前飞机需做低空定高飞行,并要求其下滑定高控制精度高、改平迅速、过载适当、动/静态性能良好。为达到此要求,不仅需要建立结构合理的下滑定高控制方案,还要设计性能优异的控制规律,因此需对所设计的下滑定高控制系统方案进行实验室条件下的大量调试和仿真验证。为了在实验室条件下对控制方案设计、调试和仿真验证的简洁方便,设计了一种飞机下滑定高控制的仿真图形用户界面(Graphical User Interface,GUI),并对所建立的飞机下滑定高控制方案及其相关控制规律进行了高效仿真研究。
1 飞机下滑定高控制方案及控制规律
飞机下滑定高控制系统通常是通过控制飞机升降舵来改变飞机俯仰姿态,进而达到纵向航迹即飞行高度的改变,并基于相关控制规律,对给定高度实施稳定与控制,实现飞机低空定高飞行。至今出现多种飞机下滑定高控制方案[1-2],本文主要对分别加入俯仰角信号和延迟接通定高系统这一控制方案实施GUI的设计与实现。其设计的控制方案结构如图1所示[3-5]。

图1 控制系统结构方案
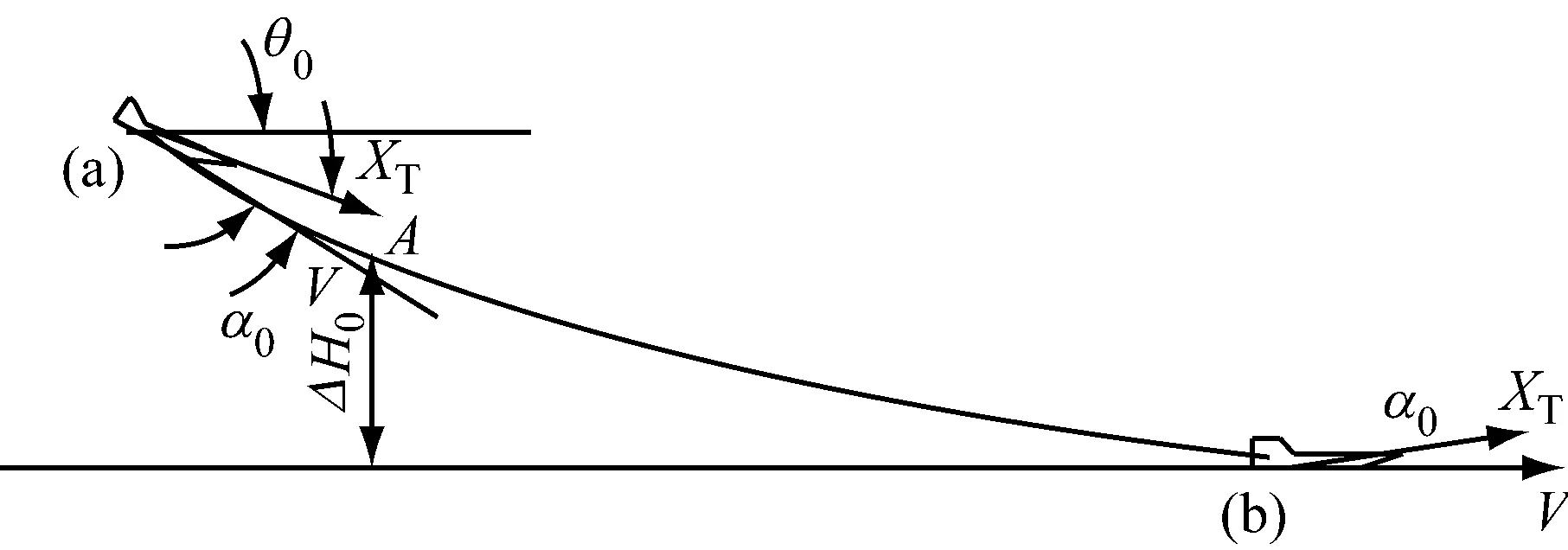
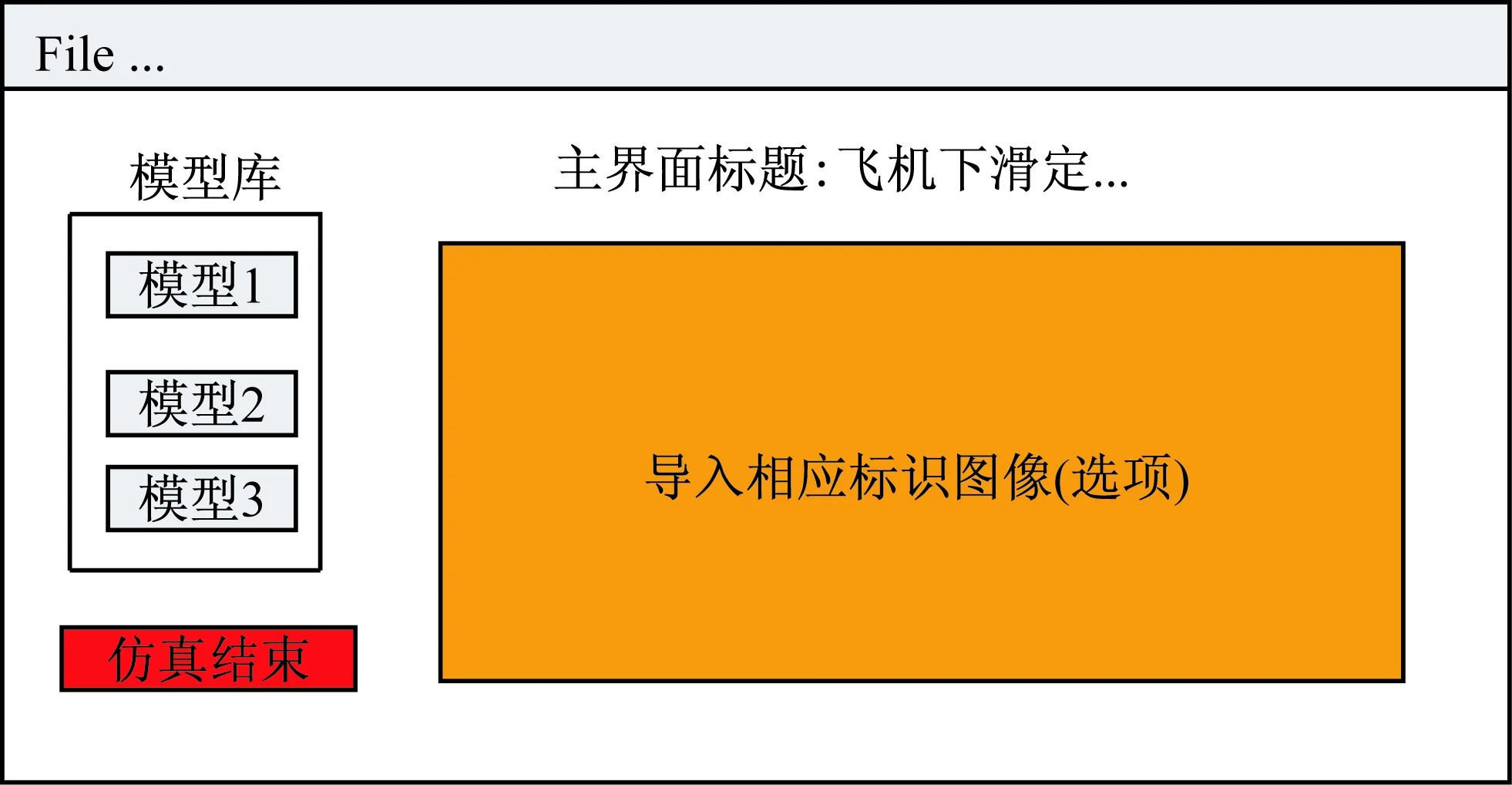
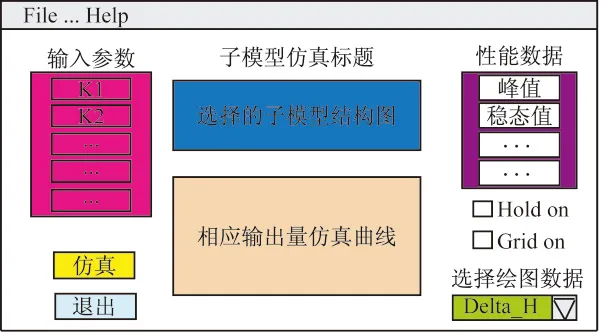
当系统不设PID环节时,设tdg(>0)时刻接通定高系统,则此时信号的作用可分为两个阶段:改平阶段(0≤t (1) 飞机改平阶段主要是利用俯仰角控制回路控制飞机的姿态角改变,从而改变航迹倾斜角使飞行轨迹发生变化,控制飞机下滑降低高度。而在定高阶段,飞行的实际高度基本达到了预定范围内,但由于阻尼不足,飞机定高轨迹有可能还不稳定,即飞机在作衰减性的沉浮运动,这时需要接入定高环节,以稳定飞机的高度。 当系统设置PID补偿环节时,如在定高阶段,其控制规律修改如式(2)形式[3],[6-8]: (2) 在纵向平面内,飞机下滑定高控制轨迹设计如下:飞机按图2所示轨迹由高空下滑至100 m高度左右,并在100 m高度上作低空定高飞行。即由图2中(a)所示的姿态下滑,到达某高度A点进行改平,然后按图2中(b)所示的姿态作100 m定高飞行[2-3,9-10]。 图2 下滑定高控制轨迹图 飞机在下滑状态(a)时具有Va=V0、θa=θ0、αa=α0、ϑa=ϑ0、δza=δz0。在飞机按图示轨迹下滑过程中,要求改平时间小于5 s,迎角变化量不大于5度,并超调量较小。 由于改平过程中速度与高度变化不大,认为改平后飞机具有与下滑状态相同的动力学特性。要控制飞机从下滑姿态(a)到改平姿态(b)的轨迹符合要求,需控制飞机的航迹倾斜角θ发生改变,使其由θ0变到0,即Δθ=|θ0|。由于迎角不变,那么其姿态角就要相应地改变|θ0|,亦即Δϑ=Δθ=|θ0|。 3.1 GUI设计 该GUI是通过Matlab R2008b设计和实现的。其GUI设计原理:在仿真GUI上输入下滑定高控制方案的相应模型参数,界面接收这些参数并将参数值传递到Simulink模型中,根据输入的参数值设置相应环节的参数,然后进行系统仿真;仿真的输出结果传到工作空间,进行相应的处理和运算,得出控制系统响应的各性能数据;最后利用输出数据绘制仿真曲线并将性能数据显示在界面上。同时,GUI还应该具有比较、保持仿真曲线等的其他辅助功能[11-12]。 采用Matlab设计GUI主要包括M文件编程方式、基于GUIDE辅助的GUI设计方式等,而基于GUIDE辅助的GUI设计方式具有如下鲜明特点[13-15]:设计者毋须了解图形实现的具体底层细节,就可绘制非常复杂的图形;只需几个简单函数以及鼠标拖拽等操作就可简单、快捷地设计出美观、方便的菜单化和控件式的人机交互界面;可根据需要来规划、设计图形外观,不断完善,直至绘图结果完全符合用户要求。 Matlab R2008b具有多种不同控制框,均用函数Uicontrol建立,属性Styles决定了所建控制框的类型。Callback属性值是当控制框激活时,传给eval在命令窗口空间执行的Matlab字符串。它们主要包括按钮(Push Button)、滑动条(Slider)、单选按钮(Radio Button)、复选框(Check Box)、文本框(Edith Text)、文本标签(Static Text)、下拉菜单(Pop-Up Menu)、下拉列表框(List Box)、双位按钮(Toggle Button)和坐标轴(Axes)。另外还有面板(Panel)、按钮组(Button Group)和ActiveX控件(ActiveX Control)。 当设计者在Guide设计界面上设置好各组件后,保存界面将生成 “用户命名.fig”和“用户命名.m”两个文件。前者保存有图形句柄,后者是实现交互功能的核心程序,用户可以在其中添加相应代码,实现预定的功能[13-15]。 GUI设计的基本步骤包括草图构思、绘制、控件调整、设置控件属性、界面美化、创建菜单等[7]。如本文设计的GUI包括仿真主界面和模型仿真子界面两层,其中仿真主界面包括标题区、模型库区等内容,而仿真子界面包括基于飞机不同飞行状态以及采用的不同控制规律下的多个子模型结构显示区、控制规律有关参数输入框区、控制系统性能输出区、仿真曲线绘制区等,其仿真主/子界面的构思草图如图3、图4所示。 图3 仿真主界面草图 图4 仿真子界面草图 3.2 GUI实现 在完成仿真主/子界面草图构思并保存后,下面的工作就是对所生成的“仿真界面名.M”文件添加实现各项功能的代码,重点是对各回调函数内容的编写,达到完成各项功能的目的。这是实现所设计的GUI核心内容。 实际设计的GUI层次关系图如图5所示。 图5 实现的GUI仿真界面层次关系 下面将编写的部分内容简述如下: 在打开GUI主界面程序时,须在“Opening Fcn”中,写入加载图片、加载模型、初始化参数、绘图、计算结果等的相应代码,这样在以后改变仿真参数后,依然可以使用已加载的模型。其程序编制如下: function fzjm_OpeningFcn(hObject, eventdata, handles, varargin) handles.output = hObject; % 以下为根据用户需求,自编的辅助程序 %% (可选) h=waitbar(0,'请稍等,正在打开系统....'); pause(0.5); waitbar(0.5,h,'正在加载...'); pause(0.5); waitbar(1,h,'打开完成'); pause(2); delete(h); I=imread('fzmodle.bmp','bmp'); %打开Model1的模型图 axes(handles.axes1); imshow(I) axis off %% 以上为添加的自编程序 guidata(hObject, handles); 在计算控制系统性能数据时,可采用调用外部函数形式,这样就非常便于在相应的“Callback”函数下实现所需的计算功能。 在子界面的“仿真”按钮所对应的“Callback”下,需要写入取得界面参数、设置模型参数、仿真、绘图、处理数据、显示结果等代码。根据各个交互组件的属性,可以利用, get(Hobject,”属性名”)命令取得所输入的参数值,之后,就可以利用以下命令设置相应环节的参数、仿真并取得输出值: set_param(‘模块名’,’参数名’,预设值); [t,x,out1…out5]=sim(‘模型名’,options);options选项包括很多内容,这里主要设置仿真时间。 取得输出数据之后就可以进行绘制图形、性能计算等数据处理工作。 根据所得的性能数据再利用set(Hobject,”属性名”,预设值)命令设置相应交互组件的属性值,从而将结果显示在界面上。 再相应地添加其他组件、菜单项的Callbcak代码,就能够完全的实现所需要的功能。 基于某型飞机下滑飞行状态的气动数据,建立其运动方程,并推出其相应传递函数模型,如Δϑ(s)/Δδz(s),Δθ/Δϑ(s),ΔV(s)/Δδz(s),进而建立Simulink仿真模型,如模型1、2、3。 基于所设计的GUI,对飞机下滑定高控制方案进行仿真研究,其运行主界面如图6所示。点击“模型3”后,进入对模型3进行仿真的子界面,并显示出控制方案结构图,在“传动比参数”、“PID补偿器”等输入框中输入相关参数后,单击“仿真”按钮,即可在“控制系统性能”一栏中输出该控制方案的控制性能,并按选择的仿真参数输出相应仿真曲线。如果控制系统性能不满足要求,可以重新调节传动比参数、PID补偿器参数,再次仿真,直到满足相关要求。如图7所示。 图6 实现的GUI仿真主界面 (a) 定高系统延迟2 s接入,定高误差带为5%的ΔH,Δα (b)定高系统延迟5 s接入,定高误差带为2%的ΔH,Δα (c)定高系统延迟5 s接入,定高误差带为2%,具有550纵向 (d)定高系统延迟5 s接入,定高误差带为2%,具有550纵向干扰力矩的ΔH,Δα仿真曲线(ΔH0=-30 m) 基于Matlab提供的GUI程序开发环境Guide和Simulink仿真建模功能,实现了飞机下滑定高控制方案的GUI设计和实现,并基于所设计的GUI实现了多模型的控制方案的仿真验证。所设计的GUI层次分明、简洁方便、功能强大,可在实验室环境下,高效实现控制系统参数整定、控制规律设计等多方面的仿真研究,对提高学员的学习兴趣、培养学员分析问题和解决问题能力大有裨益,对飞行控制系统课程的控制结构及其控制规律的实验室仿真教学具有积极参考意义。 [1] 文传源.现代飞行控制系统[M].北京:北京航空航天出版社,2004. [2] 张明廉.飞行控制系统[M].北京:国防工业出版社,1984. [3] 曲东才,谢孔树.一种飞机低空下滑定高控制方案改进设计及仿真[J].海军航空工程学院学报,2010,25(4): 416-420. [4] 程继红,曲东才. 某型飞机角位移自动驾驶仪比例式控制规律设计与仿真[J].海军航空工程学院学报,2011,36(3):241-245. [5] 胡寿松.自动控制原理(第五版)[M].北京:科学出版社,2010. [6] 曲东才,谢曦鹏,曹 栋,等.飞机下滑波束导引系统设计及仿真研究 [J].海军航空工程学院学报,2014,29(3): 209-212. [7] Niewoehner R J, Kaminer I. Design of an autoland controller for an F-14 aircraft using H-infinity control[J]. Journal of Guidance, Control and Dynamics, 1996,19(3):656-663. [8] Shyh-Pying S, Agarwal R K. Design of automatic landing systems using mixed H2/H∞control [J].Journal of Guidance, Control and Dynamics,1999,22(1):103-114. [9] 高 冰,李 鹏,张 学,等.基于自适应模糊控制的飞机自动着陆系统[J].电气传动,2011,41(8):24-27. [10] 刘 冰,艾剑良.基于LQG/LTR方法的飞机自动着陆系统设计[J].动力学与控制学报, 2010,8(1):92-96. [11] 叶希立,丁 强,黄国辉,等.三容水箱计算机控制仿真与实验系统的研发[J].实验室研究与探索,2013,32(6):81-83. [12] 谢仕宏.MATLAB R2008 控制系统动态仿真实例教程[M].北京:化学工业出版社,2009. [13] 宗节保,段柳云,王 莹.基于MATLAB GUI软件制作方法的研究与实现[J].电子设计工程,2010,18(7):54-56. [14] 王默玉,宗 伟,刘春磊,等.基于MATLAB 的图形用户界面的构造方式与应用[J].现代电力,2002,19(1):76-82. [15] 陈垚光,毛涛涛,王正林,等.精通MATLAB GUI设计[M].北京:电子工业出版社,2008. GUI Design and Simulation Experiment for Aero Sliding Down to Fixed Height Control QUDong-cai1,LUJian-hua1,XIEKong-shu2 (1. Department of Control Engineering, Naval Aeronautical Engineering Institute, Yantai 264001, China;2.Unit 91515 of PLA, Sanya 572016, China) In order to improve high efficiency of control system design and intuition of laboratory simulation and verification of control laws, it is an important method to design a GUI which could display structure of the designed control system, input and adjust of parameters of the control law, performance output of control system. It is also an important step to economize the experiment cost, increase the interest in learning, and improve their abilities of analyzing and solving problems. For this target, based on the GUIDE of GUI procedure development environment and the SIMULINK simulation function provided by MATLAB, a GUI was designed to simulate and verify the project of controlling aeroplane sliding down to fixed height. The GUI has the following characteristics: clear hiberarchy, laconical convenience, diversiform function, and it can quickly and conveniently to complete simulation for aeroplane sliding down to fixed height control. sliding down to fixed height control; trajectory design; PID; GUI design and realization 2015-01-24 曲东才(1964-),男,山东烟台人,博士,教授,主要研究方向:飞行控制系统设计与仿真的教学和科研。 Tel.:0535-6635641;E-mail:qdc@yeah.net TP 391.9; TP 23 A 1006-7167(2015)10-0111-05
2 下滑定高控制轨迹设计
3 GUI设计与实现

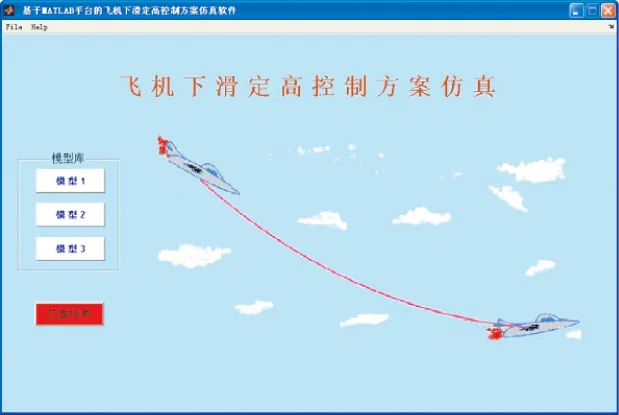
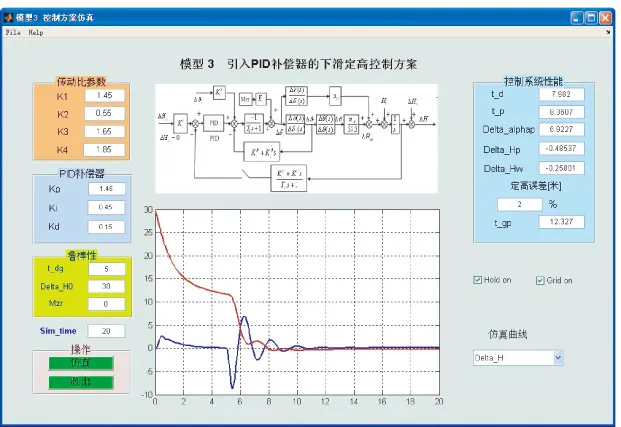
4 基于GUI控制方案的仿真


5 结 语
猜你喜欢
今日农业(2021年7期)2021-07-28
当代陕西(2020年13期)2020-08-24
读友·少年文学(清雅版)(2020年4期)2020-08-24
小学生学习指导(低年级)(2020年6期)2020-07-25
小学生学习指导(低年级)(2020年6期)2020-07-25
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
制造技术与机床(2017年5期)2018-01-19
中国三峡(2017年2期)2017-06-09
潍坊学院学报(2016年2期)2016-12-01
