
水源地污染源无人机遥感监测
2015-04-26 00:57洪运富杨海军蔡明珂朱海涛郭会敏
中国环境监测 2015年5期
洪运富,杨海军,李 营,蔡明珂,朱海涛,赵 爽,郭会敏
1.环境保护部卫星环境应用中心,北京 100094
2.浙江环科环境咨询有限公司,浙江 杭州 310007
3.中国地质大学(北京)土地科学技术学院,北京 100083
4.中国矿业大学(北京)地球科学与测绘工程学院,北京 100083
无人机是一种机上无人驾驶的航空器,具有动力装置和导航模块,在一定范围内靠无线电遥控设备或计算机预编程序自主控制飞行[1]。无人机遥感(UAVRS)集成先进的无人驾驶飞行器技术、遥感传感器技术、遥测遥控技术、通信技术、POS定位定姿技术、GPS差分定位技术和遥感应用技术,能够自动化、智能化、专业化、快速地获取国土、资源、环境、事件等空间遥感信息,并能进行实时处理、建模和分析[2],是卫星遥感技术的有力补充[3]。
目前,国内UAVRS技术发展迅速,特别是在“汶川地震”之后[4-6],在UAVRS平台、专用载荷、应用领域等方面都取得了重大的发展与进步[7-10],发展了适用于不同领域监测的无人机系统;此外,在UAVRS数据处理算法及软件开发等方面也进行了探索研究,发展了一系列具有针对性的数据处理方法[11-12]。由此可见,UAVRS技术应用不断发展壮大,在各领域已具备一定的实践应用基础,并随着技术的进步,不断趋于成熟。
近10多年来,中国城镇化建设发展迅速,工业规模不断扩大,给所在区域的水源地造成了极大威胁[13-15],并且,这种威胁已日益显现,造成全国各地水源地污染事件频发[16],严重影响了当地居民的身体健康与用水安全。因此,开展水源地监测,对于保护水源地安全尤为重要。
目前,中国水源地污染监测主要基于“点”尺度的人工监测,难以获取“面”尺度信息,卫星遥感技术具有快速、大范围监测等优势,能够获取整个水源地的污染分布状况并进行评价[17],为水源地监测提供了较好的监测手段。但卫星遥感技术容易受成像天气状况以及时间与空间分辨率的影响[18-19],难以实时、快速地进行监测。而UAVRS技术具有机动、灵活、空间分辨率高、受天气状况影响较小等优势,能够弥补卫星遥感监测的不足。
因此,研究UAVRS技术水源地污染监测技术方法,对于开展水源地污染监测与应急响应,拓展水源地遥感监测领域具有重要科研价值。以南水北调东线工程源头输水水域的水源地为研究区,研究无人机平台与载荷搭配技术,并开展水源地部分江段的污染源监测分析,为水源地监测与保护提供有力的技术支撑。
1 水源地无人机监测平台、载荷搭配技术
无人机按机翼类型可以分为固定翼与旋翼,固定翼无人机飞行姿态较为稳定,航时与飞行距离较长,但需要使用理想的起降场地,而旋翼无人机可在任意地点起降,但飞行距离、航时较短,且飞行姿态不太稳定,容易造成飞行事故,因此,在实际应用中,固定翼无人机比较流行,是目前应用相对成熟的平台。无人机载荷目前虽已涵盖可见光、热红外、紫外、微波等谱段,但只有可见光是应用比较广泛、成熟的载荷,其他载荷基本上仍处于研究试验阶段。结合水源地污染类型特征以及周边生态环境状况,基于无人机平台与载荷应用现状,选用固定翼无人机和电动手抛无人机平台,分别搭载CCD数码相机和热红外摄像机获取水源地污染信息。采用的无人机监测平台及载荷具体参数如下。
1.1 固定翼无人机参数
机身采用玻璃钢复合结构,具有重量轻、载荷比大、操作灵活、使用方便、可靠性高、可维护性好与价格低廉等特点,是唯数不多的能够批量生产的工业化产品,同时也是一款专为航拍与航空遥感需求而设计的无人机,在机舱体积、起飞降落方式、留空时间、巡航速度等方面具有较大优势。其最大特点是结实耐用,价格低廉,搭载相机后可用于日常航拍作业,监测生态环境和水源地污染源。具体参数见表1。

表1 固定翼无人机平台参数
1.2 电动手抛无人机参数
目前国内使用的多款电动手抛无人机,都是借鉴美国军用“大乌鸦”手抛无人机技术的基础上研发的,可以搭载CCD彩色摄像机、照相机或热红外摄像机;机身分解后可以放入手提箱内携带,适用于快速反应的环境应急、监察等飞行任务。具体参数见表2。
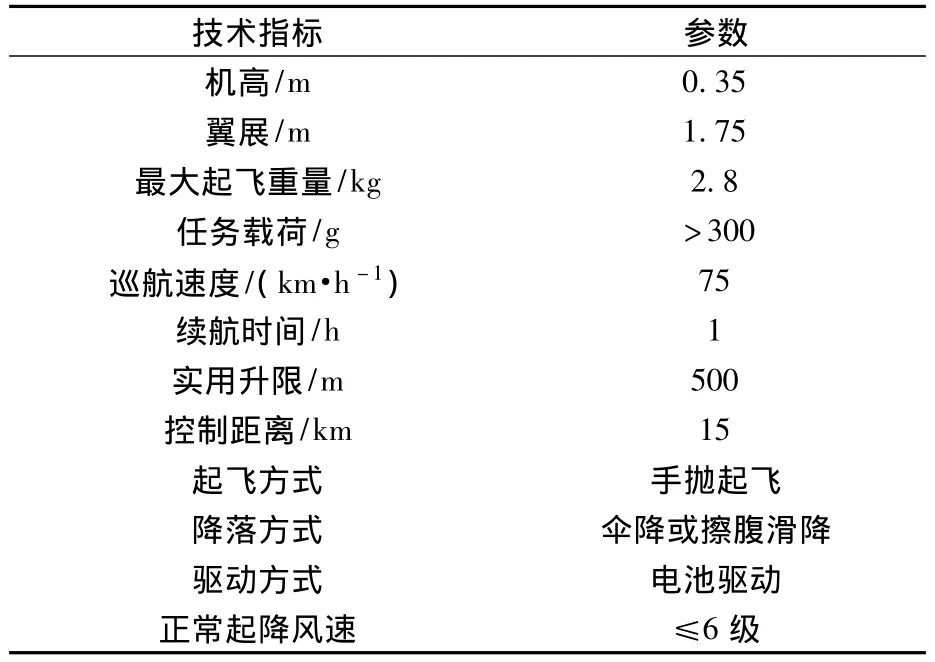
表2 电动手抛无人机平台参数
2 水源地数据获取与处理
2.1 无人机飞行区域
飞行区域位于江苏省扬州市南水北调东线工程源头输水水域的三江口江都水利枢纽、芒稻河及夹江的部分江段,全长为11.5 km,该区域水质持续稳定达标对于南水北调东线工程具有重要意义。
扬州市属于亚热带季风性湿润气候向温带季风气候的过渡区,四季分明,地势平坦,年均气温约为16℃,年均降水量为864 mm,年日照时数1 721 h。
2.2 数据获取与处理
无人机数据获取前首先进行飞行区域航线规划,设计飞行高度、飞行距离、航速、航向与旁向重叠度,之后,测试无人机内导航定位与地面测控信息传输系统,一切确认无误后,进行无人机飞行航拍。
飞行搭载CCD光学相机的无人机平台飞行高度为500 m,航速为110 km/h,共获取782幅航拍影像,采用专业航拍软件处理后,获取水源地相关区域共27.53 km2的0.1 m高空间分辨率航空影像数据;搭载热红外摄像机的手抛无人机飞行高度为400 m,航速为75 km/h,获取了水源地周边污染源热红外视频数据。
3 水源地敏感目标监测
在水源地污染源无人机数据获取的同时,调研研究区域的污染类型,并对水源地内及其周边地表覆盖类型进行实地踏勘,获取了污染源及地表覆盖的相关信息,为无人机数据后期解译提供信息基础。
对于无人机CCD影像数据,因其空间分辨率高且环境敏感目标便于识别,故采用目视解译方法,结合已获取的地面调查信息,获取水源地污染源及地表覆盖信息;对于无人机热红外视频数据,根据热红外影像中的不同颜色代表被测物体的不同温度,并能反映热污染源的位置、污染源分布范围和扩散形态[20]等原理,目视判别隐藏的疑似污染源。
基于CCD数码相机影像监测结果发现,水源地污染主要为点源污染(工业点源、水产养殖、生活污水),面源污染(河道码头、水土流失、农业)以及内源污染(航运船舶、桥梁交通运输、渔民生活)。从监测结果也可以看出污染物的扩散形态,可为污染物的监控处理提供数据支撑。监测结果见表3和图1。

表3 污染源监测结果统计

图1 水源地污染源空间分布
基于热红外相机监测结果发现,在靠近水源地周边的某化学助剂厂西侧,存在4个隐藏在水面下的排污口,其中一个排污口排水量巨大,排出的温水扩散到90 m宽的河道内,改变了河道的局部温度。监测结果如图2所示。

图2 热红外相机拍摄某助剂厂排污口
4 结论
无人机平台搭载高分辨率数码相机、热红外摄像机等不同载荷,可对明渠排放污水和隐藏在水面下的水源地排污口进行监测与监控,能够获取污染源类型、分布和扩散信息,而且能够监测水域各种船舶非法排放残油及漏油等污染,为了解水源地及周边环境可能存在的潜在风险提供数据支撑。
南水北调东线工程源头输水水域内存在大量分散的工业点源污染、航运内源污染、农村居民生产生活污染、农业面源污染等各种污染源,建议加强水源地环境监管和水质监测,保证水源地水质安全。
[1]Adam C,Vincent G,Everett A.Unmanned aircraft systems in remote sensing and scientific research:classification and considerations of use[J].Remote Sensing,2012(4):1 671-1 692.
[2]李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014,39(5):507-513.
[3]李营,陈忱,张峰,等.无人机影像高铁竣工环保验收信息分类体系研究[J].铁道工程学报,2011(7):105-111.
[4]臧克,孙永华,李京,等.微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010,19(3):162-166.
[5]何磊,苗放,唐姝娅,等.无人机遥感图像及其三维可视化在汶川地震救灾中的应用[J].物探化探计算技术,2010,32(2):206-210.
[6]梁京涛,成余粮,王军,等.基于无人机遥感技术的汶川地震区典型高位泥石流动态监测[J].中国地质灾害与防治学报,2013,24(3):54-61.
[7]谢涛,刘锐,胡秋红,等.基于无人机遥感技术的环境监测研究进展[J].环境科技,2013,26(4):55-64.
[8]刘洋,祁琼.无人机航摄技术在国土资源领域的应用[J].地理空间信息,2014,12(1):29-31.
[9]吴振宇,马彦山.无人机遥感技术在地质灾害调查中的应用[J].宁夏工程技术,2012,11(2):133-136.
[10]李志斌,冯再福.无人机遥感系统在电力工程环保水保中的应用[J].电力勘测设计,2013(5):30-32.
[11]杨杨.无人机航拍视频图像实时拼接软件系统的设计与开发[D].北京:北京工业大学,2013.
[12]徐秋辉.无控制点的无人机遥感影像几何校正与拼接方法研究[D].南京:南京大学,2013.
[13]杨庆,陈忠荣,张伟红,等.典型地下水源地地下水污染风险评价[J].中国环境监测,2013,29(5):22-25.
[14]王玮,靳伟.石家庄典型乡镇引用水水源地环境调查与分析[J].中国环境监测,2013,29(6):70-72.
[15]赵小健.引用水源地痕量有毒有害污染物环境健康风险评价[J].中国环境监测,2014,30(1):10-12.
[16]张奇磊,高琦,沈琰.饮用水源地水质预警系统的建立和应用研究[J].环境科学与管理,2014,39(2):123-125.
[17]姚艳娟,吴传庆,王雪蕾,等.地表饮用水源地安全指数及快速评价方法[J].环境科学与技术,2012,35(1):186-190.
[18]陈文召,李光明,徐竟成,等.水环境遥感监测技术的应用研究进展[J].中国环境监测,2008,24(3):6-11.
[19]李正强,许华,张莹,等.基于卫星数据的灰霾污染遥感监测方法及系统设计[J].中国环境监测,2014,30(3):159-165.
[20]胡著智,王慧麟,陈钦峦.遥感技术与地学应用[M].南京:南京大学出版社,1999.
猜你喜欢
水上消防(2022年2期)2022-07-22
节能与环保(2022年3期)2022-04-26
环境保护与循环经济(2021年7期)2021-11-02
黑龙江水利科技(2020年8期)2021-01-21
环境影响评价(2020年2期)2020-12-02
环境(2019年8期)2019-08-22
中国资源综合利用(2017年4期)2018-01-22
青海政报(2017年6期)2017-07-24
北京航空航天大学学报(2016年9期)2016-11-16
治淮(2015年9期)2015-11-02
