串联式混合动力拖拉机能量管理策略
2015-04-21 10:31:29方树平周志立徐立友
河南科技大学学报(自然科学版) 2015年6期
方树平,周志立,徐立友
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
串联式混合动力拖拉机能量管理策略
方树平,周志立,徐立友
(河南科技大学 车辆与交通工程学院,河南 洛阳 471003)
以串联式混合动力拖拉机为研究对象,针对电动汽车和电动拖拉机的不同,对高级车辆仿真器(advanced vehicle simulator,ADVISOR)进行了二次开发,建立了串联式混合动力拖拉机仿真系统。制定了恒温器式和功率跟随式策略,并在此基础上提出了模糊控制式能量管理策略。分别应用3种策略对串联式混合动力拖拉机在犁耕工况下进行了仿真分析。分析结果表明:3种策略都能有效地维持电池荷电状态(SOC值)在指定范围内。在犁耕工况下工作1 h,采用模糊控制式能量管理策略时,电池SOC曲线变化最为平缓,拖拉机的燃油经济性比功率跟随式策略提高了4.16%,比恒温器式策略提高了8.10%。
串联式混合动力;拖拉机;高级车辆仿真器;能量管理;模糊控制
0 引言
近年来,中国大力提倡发展“绿色农机”,国家环保总局发布的GB 20891—2007 明确了拖拉机的强制排放指标[1],节能减排成为拖拉机研究领域的重点。针对传统拖拉机存在变速器结构复杂、传动效率低、油耗高、排放高[2]以及纯电动车辆存在续航里程短、充电不便等问题[3],混合动力车辆可以通过能量管理方案解决此类问题。
能量管理策略、电池技术和电机驱动及控制构成了混合动力车辆开发的三大关键技术[4]。能量管理策略的优劣直接影响了整车性能。能量管理策略分为规则控制策略、瞬时优化控制策略、全局优化控制策略和基于工况自适应的路况预测控制策略4种[5]。文献[6-8]分别针对串联、并联和混联式混合动力汽车研究了其能量管理策略及优化问题,以达到固定循环工况减少燃油消耗和排放的目的。文献[9]针对单电机电控机械式自动变速器(automated mechanical transmission,AMT)重度混合汽车,提出了不受工况限制的动态能量管理策略。文献[10-11]研究了混合动力汽车能量管理策略的全局优化问题。目前,国内外对于混合动力车辆能量管理策略的研究主要集中在汽车等高速车辆上,而对拖拉机的研究较少。
本文以串联式混合动力拖拉机为研究对象,制定串联式混合动力拖拉机的能量管理策略,并在基于ADVISOR二次开发的仿真系统下进行仿真分析,为拖拉机控制系统设计提供依据。
1 串联式混合动力拖拉机的能量流动与控制策略
1.1 串联式混合动力拖拉机的能量流动
本文所采用的串联式混合动力拖拉机结构及能量流动图[2]如图1所示,能量流动有如下几条路线:
(Ⅰ)电池→控制器→电动机→变速器→驱动桥。
(Ⅱ)发动机→发电机→控制器→电池→电动机→变速器→驱动桥。
(Ⅲ)发动机→发电机→控制器→电动机→变速器→驱动桥。
(Ⅳ)驱动桥→变速器→电动机→电池(制动能量回收)。
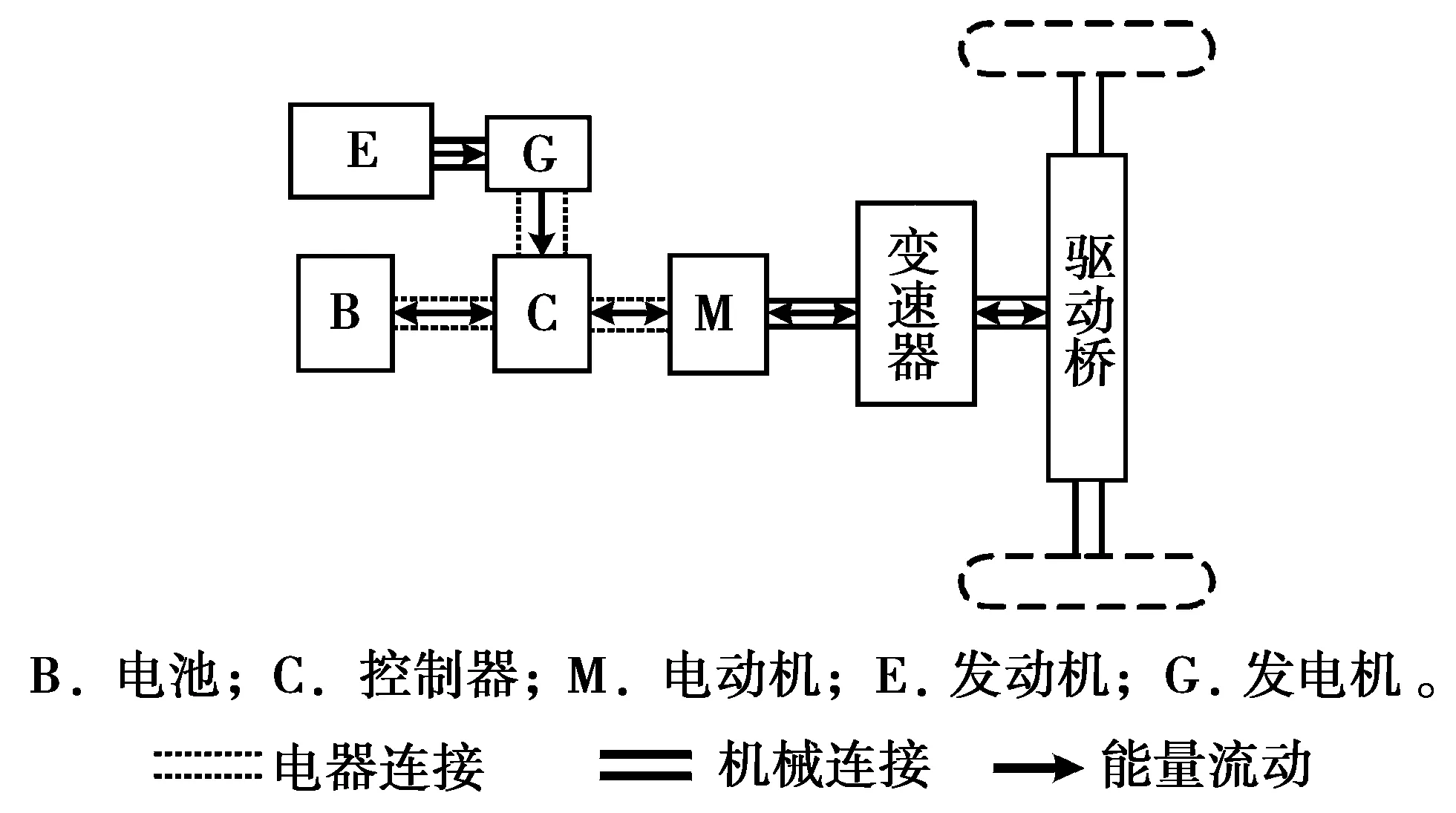
图1 串联式混合动力拖拉机结构及能量流动图
1.2 串联式混合动力拖拉机的能量管理策略
串联式混合动力车辆通常有恒温器式和功率跟随式两种成熟的能量管理策略[12-15]。
基于上述两种能量管理策略的思想,制定了串联式混合动力拖拉机的恒温器式和功率跟随式能量管理策略,并在此基础上提出了模糊控制式能量管理策略。
1.2.1 恒温器式能量管理策略
恒温器式策略根据电池荷电状态(SOC值)确定发动机的开启和关闭,并使发动机工作在最佳工作点处。该工作点是根据发动机万有特性图,预先计算出的燃油消耗最低时发动机的转速和转矩关系[16]。其内容如下:
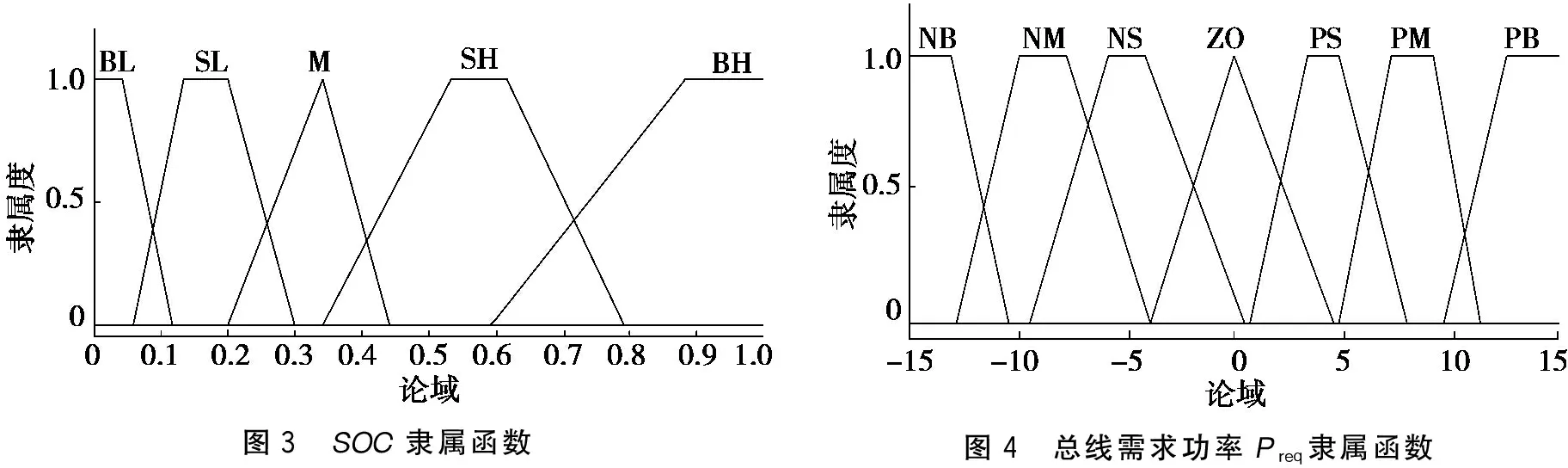
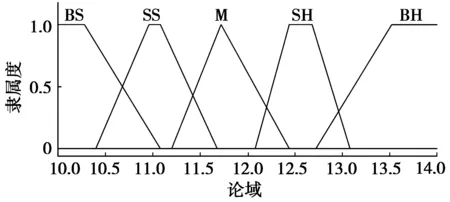
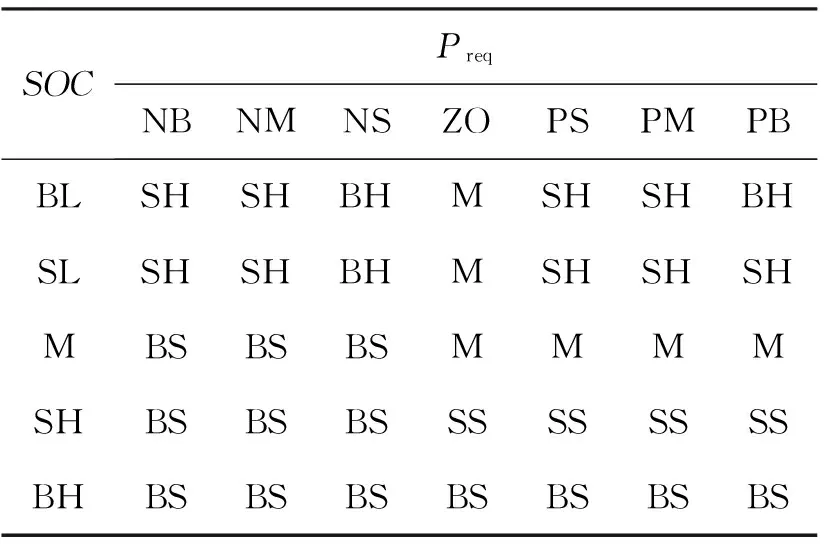
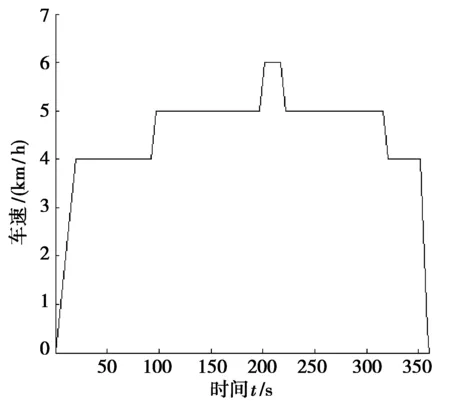
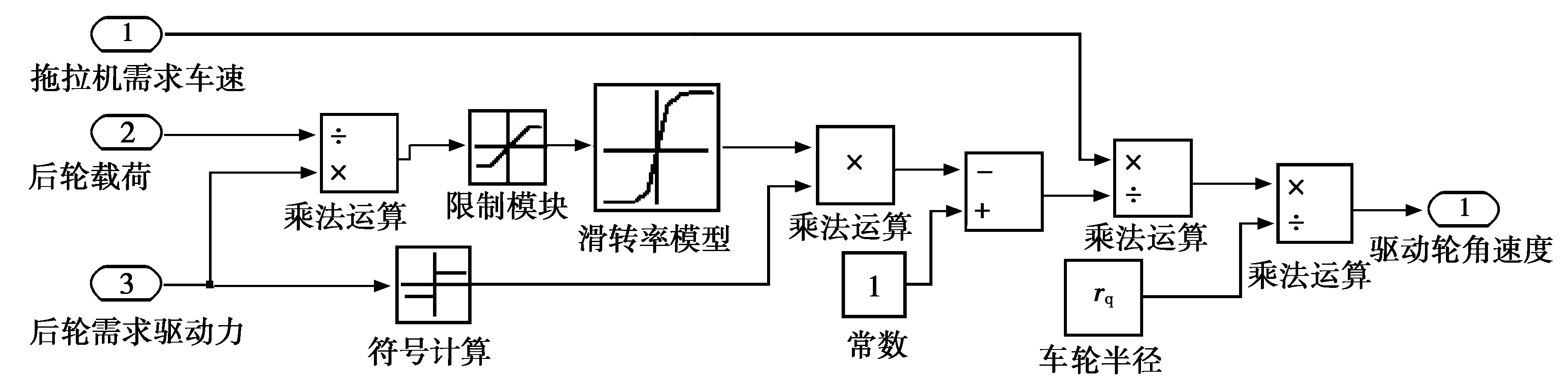
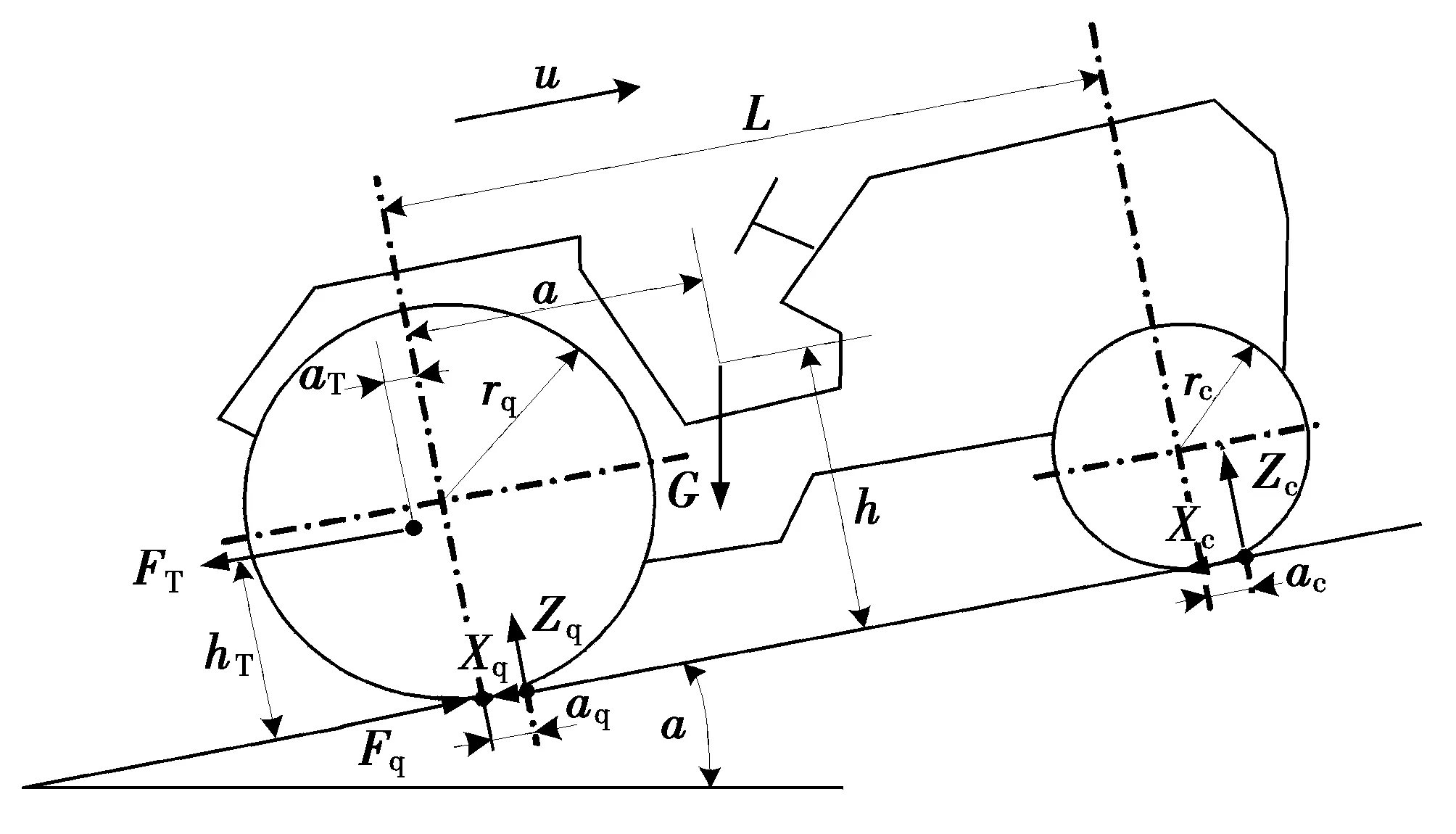
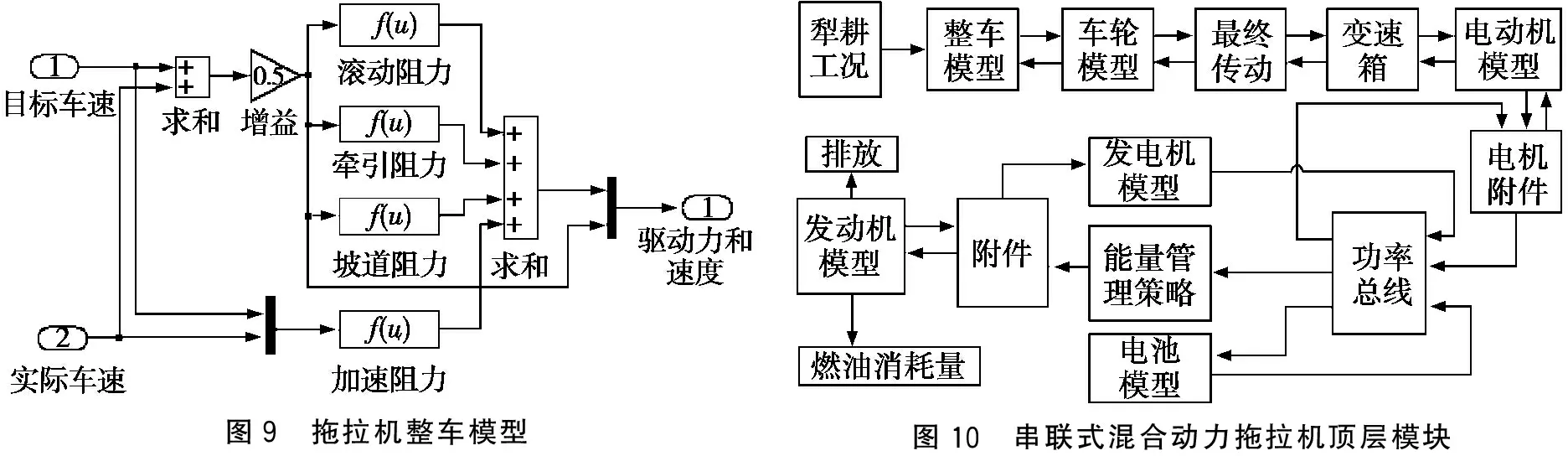
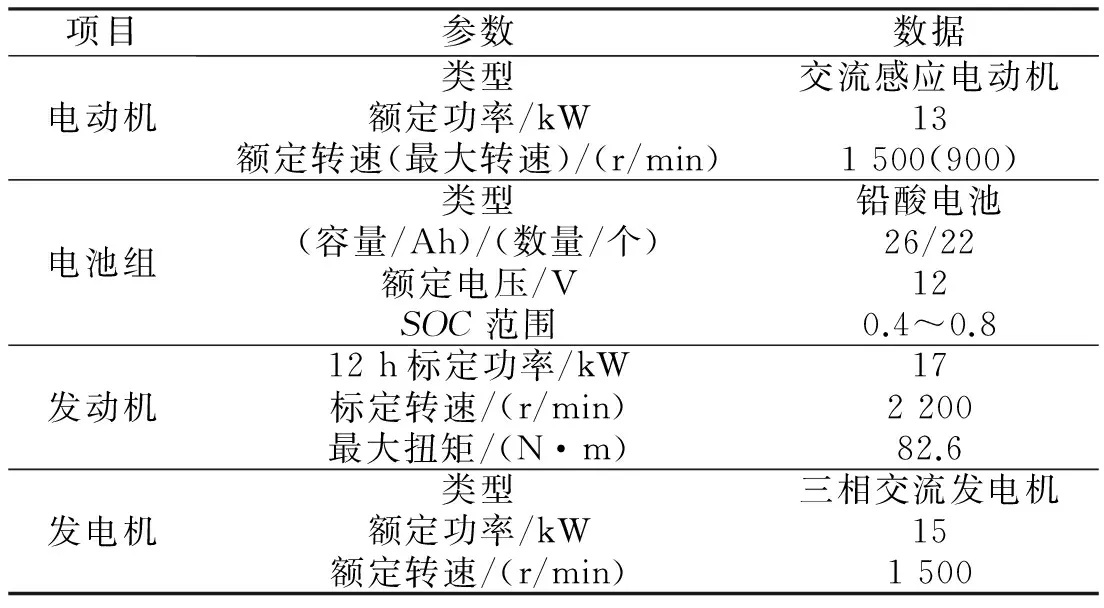
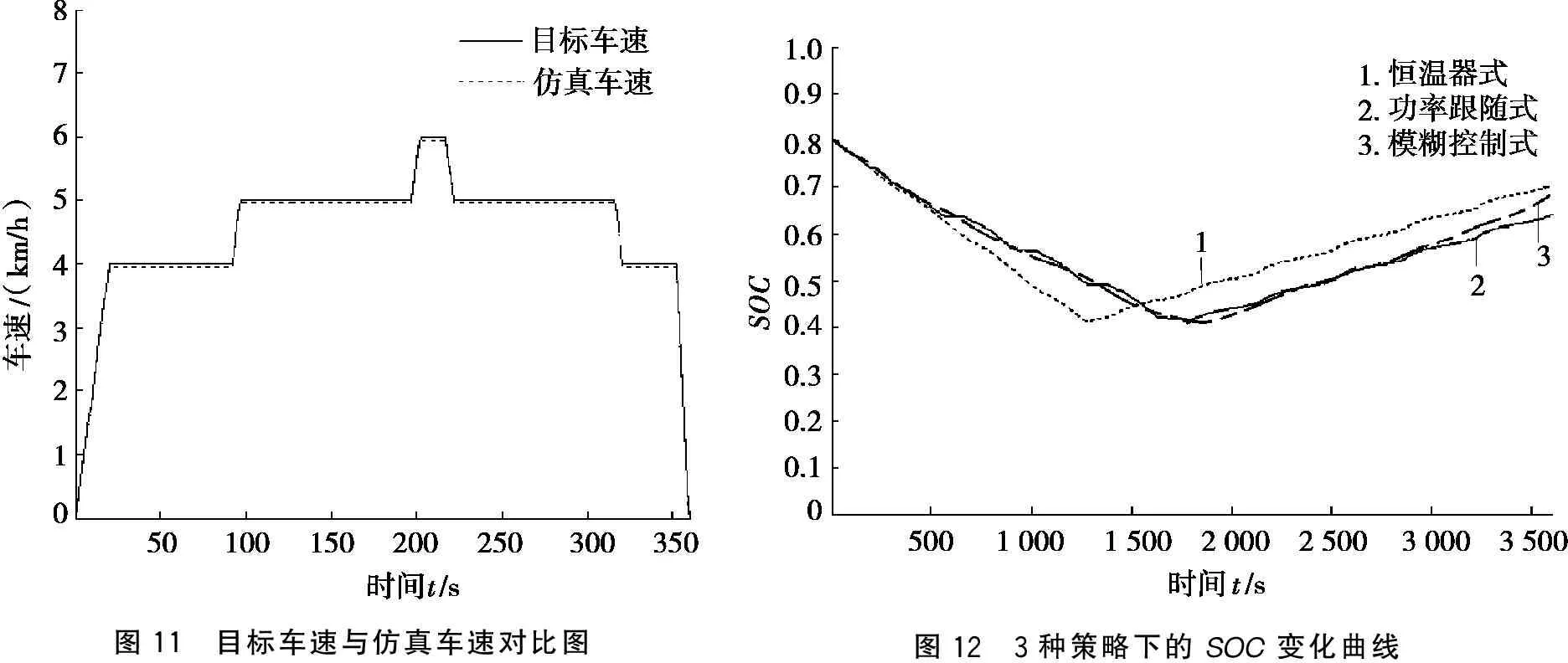
(Ⅰ)当电池SOC (Ⅱ)当电池SOCmin (Ⅲ)当电池SOC>SOCmax时,发动机关闭。 (Ⅳ)发动机工作时,处于最佳工作点。 1.2.2 功率跟随式能量管理策略 功率跟随式控制策略根据电机与电池组的工作状态,调节发动机工作点,经发电机向电池组充电。控制目标是燃油消耗最低和电池组的工作寿命最长。其内容如下: (Ⅰ)当电池SOC>SOCmax时,发动机停止工作,但当拖拉机需求的功率太大时,发动机重新启动。 (Ⅱ)当电池SOC (Ⅲ)当发动机工作时,其功率输出一方面要跟随拖拉机功率需求的变化,同时维持电池SOC处于工作范围的中间值附近,并工作于该输出功率对应的最佳工况点,该最佳工况点为效率最佳工况点。 (Ⅳ)发动机工作时,其输出功率在一个指定范围内,以保证较高的效率。 (Ⅴ)发动机工作时,其输出功率的变化率不应超过规定值。 1.2.3 模糊控制式能量管理策略 模糊控制可以表达串联式拖拉机控制中难以精确定量表达的规则,如功率要求离最优曲线较近,则尽量少用电池,可以方便地实现不同影响因素(功率需求、SOC、电机效率等)的折衷,鲁棒性好[17]。在串联式拖拉机的设计中,有模型、部件参数、测量值、工作条件或环境等大量不确定因素,这要求串联式拖拉机的控制系统应有较强的鲁棒性。 本文将拖拉机的总线需求功率Preq和电池SOC作为模糊控制器的输入变量,通过分析两者的变化来合理决定模糊控制器的输出变量发动机功率Pe的变化量,达到功率分配的目的。其仿真模型如图2所示。总线功率需求Preq的论域,实际为拖拉机电动机功率的变化范围[-13,13],在其取值范围内分7个模糊子集,即{NB,NM,NS,ZO,PS,PM,PB}。电池SOC的论域取为[0,1],在其论域范围内分5个模糊子集,即{BL,SL,M,SH,BH}。对于模糊控制器的输出变量发动机功率Pe,根据发动机MAP图划分的经济区域可确定其论域为[10,14],在其论域范围内分5个模糊子集,即{BS,SS,M,SH,BH}。 图2 模糊控制式能量管理策略仿真模型 (Ⅰ)隶属函数设计 由于三角形隶属度函数和梯形隶属度函数具有结构简单、运算速度快和控制效果好的特点,因此,本文设计的模糊控制器输入输出变量采用两者相结合的隶属度函数。SOC、总线需求功率和发动机功率的隶属度函数如图3~图5所示。 图3 SOC隶属函数图4 总线需求功率Preq隶属函数 图5 发动机功率Pe隶属函数 (Ⅱ)控制规则设计 模糊控制式策略和恒温器式控制策略从原理上来说,两者都是基于规则的控制策略,且两者控制规则的制定都是基于对控制对象的了解和工程师在控制过程中的经验,因此,模糊规则的制定可以参考目前应用较多的基于规则的控制策略的控制经验,见表1。 表1 发动机功率Pe的控制规则 为了验证所制定能量管理策略的合理性,需要一个可靠的串联式混合动力拖拉机仿真系统。目前,ADVISOR是世界汽车行业最普遍使用的电动汽车仿真软件平台之一,是在Matlab/Simulink软件大环境下开发的,各子系统均采用模块化设计思想,且仿真模型与源代码完全免费公开[18],因此,本文选择此软件进行了二次开发。针对串联式混合动力拖拉机与串联式混合动力汽车的不同,对仿真工况、车速计算模型、整车模型和驱动力控制模型等进行了相应的修改,以建立串联式混合动力拖拉机的仿真系统。由于开发复杂,本文仅对拖拉机工况、车速计算模型和整车模型做简要阐述。 2.1 拖拉机工况 ADVISOR中只有汽车行驶工况,没有拖拉机工况。以拖拉机犁耕工况为例,犁耕工作时速度低,且车速平稳,与汽车工况有很大不同,所以需要重新设定拖拉机工况。 目前,国内拖拉机犁耕作业时速度为4~6 km/h[19]。图6所示为设定的拖拉机犁耕工况。 2.2 拖拉机车速计算模型 拖拉机在作业时,会产生滑转,因而使拖拉机的实际速度低于理论速度。由于ADVISOR中是针对汽车的仿真软件,因此需要在车轮模型中做出相应修改。拖拉机实际速度可表示为: u=u0(1-δ), (1) 式中:u为拖拉机实际速度,km/h;u0为拖拉机的理论速度,km/h;δ为拖拉机滑转率。 图6 拖拉机犁耕工况 拖拉机滑转率δ的大小取决于拖拉机的驱动和行走装置的形式、构造、尺寸、附着质量、土壤特性、挂钩负荷等。在实际仿真中,可采用一种由国内牵引试验资料统计得出的驱动轮滑转率方程[20]。拖拉机滑转率δ与驱动力系数φ的关系为: (2) 驱动力与附着系数的关系可表示为: Fq=φZq, (3) 式中:φ为驱动力系数;φmax为最大附着系数;δ*为特征滑转率值;Fq为拖拉机的驱动力,N;Zq为驱动轮垂直载荷,N。 随着驱动力的变化,滑转率也在不断地变化,将式(2)所示的关系以数据形式存入表中,通过查表得到实时滑转率,根据式(1)计算出拖拉机驱动轮的理论角速度,反向推理出电动机的转速转矩等。拖拉机车速计算仿真模型如图7所示。 图7 拖拉机车速计算模型 2.3 拖拉机整车模型和顶层模块 图8 串联式混合动力拖拉机受力分析简图 串联式混合动力拖拉机的受力简图如图8所示。图8中,G为串联式混合动力拖拉机作用在质心(a,h)上的重力,N;FT为牵引阻力,N;Xc、Xq为前、后轮受到的平行地面的土壤反作用力,近似用拖拉机总的滚动阻力Ff来代替,N;Zc、Zq为前后轮受到的垂直地面的土壤反作用力,N;Fq为驱动力,N。 考虑到拖拉机在行驶方向的平衡,可得拖拉机行驶平衡方程式: (4) 式中:σ为旋转质量换算系数;g为重力加速度,m/s2。 与汽车不同,拖拉机由于作业时速度低,可不考虑风阻,但需要考虑牵引阻力FT。所以在ADVISOR整车模型中需要进行修改,修改后的整车模型如图9所示,拖拉机顶层模块如图10所示。 根据文献[2,21-23]所提供的混合动力拖拉机驱动系统参数计算方法,以某型农用拖拉机为研究对象,经过计算,并参考市场上所销售产品,得到整机主要参数,如表2所示。 图9 拖拉机整车模型图10 串联式混合动力拖拉机顶层模块 表2 串联式混合动力拖拉机整机参数 为验证串联式混合动力拖拉机仿真系统的正确性,针对图6所示的拖拉机工况,在软件自带的策略下,得到目标速度与实际速度的对比图,如图11所示。为验证所制定能量管理策略的合理性,对上述拖拉机工况进行10次循环,即拖拉机连续工作1 h,然后分别对3种策略进行仿真,得到电池SOC的变化曲线,如图12所示。燃油消耗量、电池SOC终值和等效燃油消耗量等如表3所示。 图11 目标车速与仿真车速对比图图12 3种策略下的SOC变化曲线 表3 3种策略下的燃油消耗量 由图11可以看出:实际车速能够很好地跟随目标车速,即能很好地跟随工况车速,说明针对ADVISOR的二次开发是合理的,可以用来研究其能量管理策略。 由图12可以看出:3种策略都能够使SOC维持在0.4~0.8。恒温器式策略SOC下降速度最快,表明电池快速放电,电池寿命短;功率跟随式策略电池SOC变化较恒温器式更慢,但有很多局部弯折,表明电池寿命较恒温器式更长,发动机开启频繁;模糊控制式策略SOC值变化最为平稳,放电时SOC变化较为缓慢,在跌至0.4以后,能以合理的速度回升,电池寿命较前两种更长。 从表3可以看出:模糊控制式策略等效燃油消耗量最佳,分别比恒温器式策略节油8.10%,比功率跟随式策略节油4.16%。 (1) 通过对ADVISOR的二次开发,建立了串联式混合动力拖拉机仿真系统,为其能量管理策略的研究提供了可靠的平台。 (2) 恒温器式、功率跟随式和模糊控制式策略都能够对串联式混合动力拖拉机的能量分配实现管理。3种策略都能够将电池SOC值维持在0.4~0.8,模糊控制式策略的控制效果比其他两种策略更好,分别比恒温器式策略节油8.10%,比功率跟随式策略节油4.16%。 (3)恒温器式和功率跟随式策略都是通过人为地设定门限值,将电池SOC控制在一定范围内,还需对门限值的设置进行深入研究。 [1] 国家环境保护总局,国家质量监督检验检疫总局.GB 20891—2007 非道路移动机械用柴油机排气污染物排放限值及测量方法(中国Ⅰ、Ⅱ阶段)[S].北京:中华人民共和国环境保护部,2007. [2] 徐立友,刘孟楠,周志立.串联式混合动力拖拉机驱动系设计[J].农业工程学报,2014,30(9):11-18. [3] 宋永华,阳岳希,胡泽春.电动汽车电池的现状及发展趋势[J].电网技术,2011,35(4):1-7. [4] Chan C C.The State of the Art of Electric,Hybrid,and Fuel Cell Vehicle[J].Proceedings of the IEEE,2007,95(4):704-718. [5] 隗寒冰,何义团,李军,等.混合动力电动汽车控制策略分类、现状与趋势[J].重庆交通大学学报,2013,32(5):1049-1053. [6] 孙鹏龙,付主木,王周忠. 并联式混合动力汽车再生制动控制策略[J].河南科技大学学报:自然科学版,2013,34(3):35-39. [7] 王磊.一种混联式混合动力客车能量管理及模式切换协调控制研究[D].上海:上海交通大学,2013. [8] 高建平,乔宏冰,郗建国,等. 并联混合动力汽车传动系速比优化[J].河南科技大学学报:自然科学版,2014,35(6):25-29. [9] 彭志远.单电机ISG型AMT重度混合动力汽车能量管理策略研究[D].重庆:重庆大学,2012. [10] Kum D S.Modeling and Optimal Control of Qarallel HEVs and Plug-in HEVs for Multiple Objectives[D].Michigan:Univesity of Michigan,2010. [11]Neuman M,Sandberg H,Wahlberg B.Rule-based Control of Series HEV Derived from Deterministic Dynamic Programming[C]//American Control Conference.Sarnt Louis,USA.2009. [12] 赵光耀,陈泽宇,杜志远,等.串联混合动力汽车的能量管理策略[J].东北大学学报:自然科学版,2013,34(4):583-587. [13] 王文伟,程夕明,尹义林,等.串联式混合动力电动客车能量管理系统的前向仿真[J].汽车工程,2013,35(2):121-126. [14] 曾小华,宫维钧.ADVISOR2002电动汽车仿真与再开发应用[M].北京:机械工业出版社,2014. [15] 刘乐.串联混合动力汽车建模与能量管理系统控制策略研究[D].长春:吉林大学,2011. [16] 徐立友.拖拉机液压机械无级变速器特性研究[D].西安:西安理工大学,2006. [17] 张国良,邓方林.模糊控制及其Matlab应用[M].西安:西安交通大学出版社,2002. [18] 邹广才,罗禹贡,杨殿格,等.基于ADVISOR二次开发的混合动力越野车仿真分析[J].汽车工程,2007,29(4):404-409. [19] 吴相淦,张松明.农业机械运输学原理[M].北京:中国农业机械出版社,1990. [20] 周志立,方在华.拖拉机机组牵引动力学[M].北京:科学出版社,2010. [21] 高辉松.电动拖拉机驱动系统研究[D].南京:南京农业大学,2008. [22] 史立新,朱思洪,聂信天.基于串联混合动力系统的拖拉机传动参数设计[J].江西农业学报,2010,22(2):115-117. [23] 邓晓亭,朱思洪,高辉松,等.混合动力拖拉机传动系统设计理论与方法[J].农业机械学报,2012,43(8):24-31,36. 河南省重点科技攻关计划基金项目(142102210424);河南省重点产学研合作项目(132107000052);河南省教育厅重点科技攻关计划基金项目(14B460015) 方树平(1989-),男,河南信阳人,硕士生;周志立(1957-),男,河南偃师人,教授,博士,博士生导师,主要研究方向为车辆新型传动理论与控制技术. 2014-09-27 1672-6871(2015)06-0061-06 U469.2 A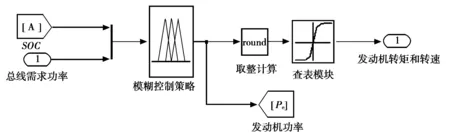
2 基于ADVISOR二次开发的串联式混合动力拖拉机仿真系统
3 控制策略仿真分析

4 结论
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00安徽工业大学学报(自然科学版)(2021年3期)2021-09-08 07:54:16实验与分析(2019年1期)2019-06-21 01:27:44语文教学之友(2018年11期)2018-11-30 09:26:30小学教学参考(数学)(2018年4期)2018-05-29 09:22:28小学生导刊(2017年15期)2017-05-17 05:44:08延河·绿色文学(2017年3期)2017-05-04 01:00:18中国新技术新产品(2017年2期)2017-01-20 20:19:15小布老虎(2016年12期)2016-12-01 05:47:00山东工业技术(2016年21期)2016-11-24 17:25:32