极性相关与LMS算法的流速测量系统研究
2015-04-20 17:05周孟然闫鹏程穆璐等
安徽理工大学学报·自然科学版 2014年4期
周孟然 闫鹏程 穆璐 等

摘要:为了解决恶劣环境中噪声等因素对流速测量系统的影响,提出了两种抗噪算法。首先概述了流体流速测量的基本原理,分析了极性相关算法的结构、电路实现、以及峰点位置确定,然后介绍了最小均方算法(LMS)在流速测量中的应用,并对两种算法进行了实验仿真。根据两者的蒙特卡洛法仿真实验可以看出,在无噪及-20dBW噪声条件下,两种算法皆可进行精确的流速测量,且峰点位置清晰。但在噪声功率增强达到-15dBW时,两者的实验仿真出现较大偏差。基于LMS算法仿真得出的测量速度依旧能良好的反应蒙特卡洛法设定速度,但是基于极性算法仿真得出的测量速度已经不能良好的反应蒙特卡洛法设定速度。在噪声功率达到-10dBW时,基于LMS算法仿真得出的数据依旧良好,此时基于极性算法仿真得出的数据已经完全失真。实验结果表明,在有噪环境中时,极性相关算法的测量精确度降低,而LMS算法因为能根据外界因素自动调节自身参数,仍然可以进行精确的流速测量。
关键词:流速测量;极性相关算法;最小均方算法;峰点
中图分类号:TK313文献标志码:A文章编号:1672-1098(2014)04-0001-05
我国矿产资源丰富,但是与此同时以瓦斯,水害等为代表的矿井灾害频发,与上世纪80年代相比,现如今的矿井水害无论是在发生频率上还是在突水量上都有较大提高。我国煤田分布广泛,成煤时期占据了多个地质时期,造成各地的矿井水文地质条件复杂,因此建立矿井突水信息监测与预警机制十分重要。流速测量作为矿井突水信息监测与预警的一个重要组成部分,对于矿井的安全生产具有十分重要的作用。
常规的流体流速测量常用的方法主要有声学多普勒测速,毕托管测速,散热法测速等。矿井水源含沙量大,有时也会含有大量气体,而且对于少部分特殊矿井,其极易形成酸性水,这些特殊状况对于常规测速仪表测量来说非常困难。目前对于这些测量困难的流体最好的测量方法是使用相关法以及自适应算法进行流速测量[1]。
1基本原理
在相距s的管道两点放置两个相同型号的传感器a和b(见图1),传感器将其接收到的流动噪声转换为电信号,此种电信号与流动噪声呈现一定关系,因此也为随机信号。a、b两传感器的输出信号分别为x(t)和y(t),在s距离值相当小的情况下,x(t)和y(t)的波形基本一致,但是在时间上有一个间隔为D的时间延时,D值即可反应流体流经两采样传感器(a、b)时所需的时间(见图2)[2]。
D值的确定可利用相关法求取,也可以根据LMS算法确定。当D的数值一定时,管道里流体的流速为V=s/D。
图1测流速基本原理图2两信号延时时间2极性相关算法
x(t)和y(t)的互相关函数为Rxy,其峰点位置的相对距离即所需确定的延时时间D(见图3)。
图3互相关函数峰值确定
两信号的互相关函数可以表示为
Rxy(τ)=E[x(t-τ)y(t)]=limT→∞1T∫T0[x(t-τ)y(t)]dt (1)
在相关法测速系统中,只需讨论相关函数的时延D,而对其相关函数的幅度等信息不关心。因此在互相关算法的基础上,可对两路信号进行数字量化,舍去幅度,只取其正负号进行数字化计算。相对于互相关算法,极性相关算法可做到算法简化,加快运算速度。其公式表达如下:
R″xy (τ)=1T∫T0sgn[y(t)]sgn[x(t-τ)]dt(2)
式(2)中sgn(x)为x的符号函数,其功能可以经过一过零比较器进行实现,因为sgn(x)只能取+1或者-1。根据两者相应关系,用逻辑“0”表示-1,逻辑1表示+1时,极性相关算法的电路可由图4实现。图4极性相关算法实现电路
理论上如果输入信号属于高斯分布时,那么极性相关函数与原相关函数两者的关系[3] 为
R″xy (τ)=2πarcsinRxy(τ)Rx(0)Ry(0)(3)
由式(3)可见,极性相关函数是普通相关函数的有偏估计,其取值范围为[-1,1],它与普通相关函数呈现单调的反正弦关系。而且输入信号的幅度值对极性相关函数是没有任何贡献的,因此从理论上来说,电路的增益对于输出信号的波形以及极性相关函数是没有影响的,即对于延时D(相关函数峰值)的测量是没有影响的。
在工程应用中可以使用溢出法确定极性相关函数的峰点位置。其基本原理为按照算法进行累加平均,随着上、下游传感器采样数据x(t)和y(t)的到来,相关函数Rxy累积增加。因工程中累加存储器的字长有限,因此累加到一定程度就会发生溢出现象,最先发生溢出的点即相关函数增长的最快点,也就是相关函数的峰值点。该点所对应的时间就是所要确定的延迟时间D的测量值。
3LMS算法
LMS (Least mean square),即最小均方算法,属于自适应信号处理算法的一种,这是一种基于纠错学习规则的学习算法,它可以根据外部因素的变化而对输入信号进行反馈进而达到输出的自动调整。对于非平稳和时变环境,一些速度估计算法不能很好的工作,但是LMS算法的自身结构特点使得其可以做到良好的速度估计。
LMS算法测量流速的基本原理同样是利用图1的模型,利用上、下传感器传送的信号,测其时间间隔D,在已知上、下传感器的间距s的情况下,即可知流体速度V。因此问题同样转换为求两相似信号的时间间隔。LMS算法测时延的基本思想为:首先将时延问题转化为FIR滤波器的参数估计问题; 然后进行FIR滤波器参数的自适应实现, 此时即可测得两信号时间间隔, 也即可得知流体流速V=s/D[4]。
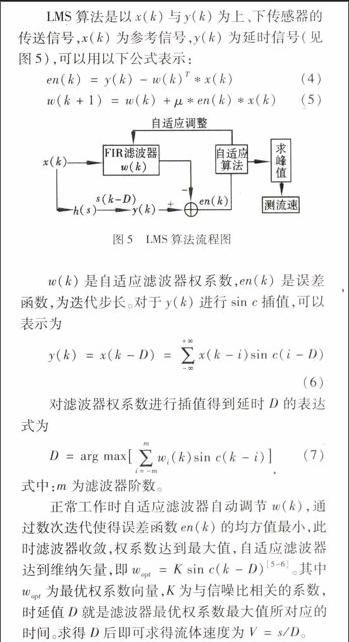
LMS算法是以x(k)与y(k)为上、下传感器的传送信号,x(k)为参考信号,y(k)为延时信号(见图5),可以用以下公式表示:
en(k)=y(k)-w(k)T*x(k)(4)
w(k+1)=w(k)+μ*en(k)*x(k)(5)
图5LMS算法流程图
w(k)是自适应滤波器权系数,en(k)是误差函数,为迭代步长。对于y(k)进行sin c插值,可以表示为
y(k)=x(k-D)=∑+∞-∞x(k-i)sin c(i-D)(6)
对滤波器权系数进行插值得到延时D的表达式为
D=arg max∑mi=-mwi(k)sin c(k-i)(7)
式中:m为滤波器阶数。
正常工作时自适应滤波器自动调节w(k),通过数次迭代使得误差函数en(k)的均方值最小,此时滤波器收敛,权系数达到最大值,自适应滤波器达到维纳矢量,即wopt=K sin c(k-D)[5-6]。其中wopt为最优权系数向量,K为与信噪比相关的系数,时延值D就是滤波器最优权系数最大值所对应的时间。求得D后即可求得流体速度为V=s/D。
4MATLAB仿真与分析
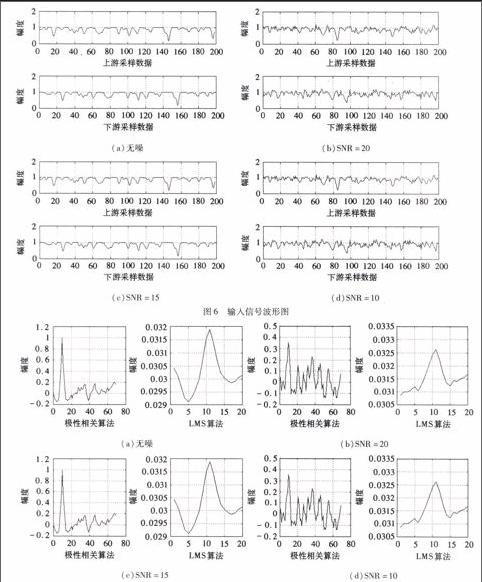
本次实验根据蒙特卡洛(Monte Carlo)法进行仿真平台搭建,设定测量环境为较为简单且常见的气/液二相流,工作环境为半径30 mm,长度260 mm的圆形管道, 传感器间距s与设定流速v为变量, V为相应算法的测量速度, 两传感器采样点各为200个,其中取样点130个,剩余70个点为延时值。两算法采用相同的采样信号,初始化LMS算法的参数,迭代步长设置为0001,设置滤波器阶数m为20,在这种环境参数中进行相应的流速测量仿真。分别进行了两种算法在无噪,SNR=20、15、10四种情况下的实验仿真(见图6~图7)。(a)无噪(b)SNR=20(c)SNR=15(d)SNR=10
图6输入信号波形图(a)无噪(b)SNR=20(c)SNR=15(d)SNR=10
图7输出信号波形图
由图7可以看出,在无噪环境中时,两者的测量结果一致,波峰位置较周围数据明显,皆位于时间点为11处,两者的测量速度与设定速度差距不大,在实验可接受范围内。在加入功率为-20dBW的高斯白噪声后,采样信号出现波动,两者的测量结果依然一致,与无噪时数据相同。波峰位置皆位于时间点为11处,LMS算法的波峰位置明显,但是极性相关算法的仿真出现了数个差距不大的波峰。在加入功率为-15 dBW的高斯白噪声后,采样信号波动增大,这时LMS算法仿真得出的数据依旧与无噪时相同,波峰位置依旧明显,但是极性仿真算法得出的数据已经开始出现误差,由波峰位置计算得出的测量速度与设定速度的差距较大。在加入功率为-10 dBW的高斯白噪声后,采样信号波动继续增大,这时LMS算法仿真得出的数据依旧与无噪时相同,波峰位置明显,但是极性仿真算法得出的数据已经完全失真,由波峰位置计算得出的测量速度已经完全不能表示设定速度。
5小结
由仿真实验可以看出,在无噪及轻微噪声环境中,两算法皆可以进行良好的流速测量。但是在噪声功率大于-15 dBW,极性相关算法已经不能很好的进行流速测量,而基于LMS算法的流速测量仍能正常工作。极性相关算法相对于普通相关算法虽有一定的抗噪性能,但是在实际工程应用中,测量设备会处于井下等恶劣环境中,此时外界干扰噪声多种多样,极有可能会对测量设备的传感器输出造成影响,这就会对其峰值位置确定造成影响,影响测量的精确度。而LMS算法由于其算法的特殊性,可以根据反馈自动调节输入,因此具有较好的抗干扰性,相比于极性相关算法,更适宜在噪声环境中进行流速测量,且有较高的精确度[7]。
参考文献:
[1]李良.气固两相流静电相关流速测量研究[D].天津:天津大学,2008.
[2]王超,王玉琳,张文彪.基于静电传感的气固两相流测量及研究装置[J].电子测量与仪器学报,2011,25(1):1-9.
[3]VAN VLECK J H, MIDDLETON D. The spectrum of
clipped noise[J].Proceedings of the IEEE,1966,54(1):2-19.
[4]张岩,牛跃华,彭黎辉,等.基于自适应滤波的气-固两相流固体颗粒速度测量方法[J].仪器仪表学报,2007, 28(11):1 927-1 931.
[5]付学志,刘忠,胡生亮,等.基于FPGA的改进型最小均方自适应时延估计器[J].系统工程与电子技术,2011,33(5):1 191-1 196.
[6]SO H C,CHING P C.Comparative study of five LMS-based adaptive time delay estimators [J].IEEE Proceedings of Radar,Sonar and Navigation,2001,148(1):9-15.
[7]ZETTERBERG V, PETTERSSON M I, CLAESSON I. Comparison between whitened generalized cross correlation and adaptive filter for time delay estimation with scattered arrays for passive positioning of moving targets in Baltic Sea shallow waters[C]//OCEANS,2005. Proceedings of MTS/IEEE. IEEE, 2005:2 356-2 361.
(责任编辑:何学华,吴晓红)