
主带小行星采样返回任务中的离子电推进应用方案
2015-04-18 09:11杨福全赵以德李娟耿海张天平周海燕
深空探测学报 2015年2期
杨福全,赵以德,李娟,耿海,张天平,周海燕
(1.兰州空间技术物理研究所,甘肃 730000; 2.上海卫星工程研究所,上海 210000)
主带小行星采样返回任务中的离子电推进应用方案
杨福全1,赵以德1,李娟1,耿海1,张天平1,周海燕2
(1.兰州空间技术物理研究所,甘肃 730000; 2.上海卫星工程研究所,上海 210000)
由于离子电推进的高比冲特性,采用它执行小行星探测器巡航阶段轨道机动任务时,将使探测器在同样的有效载荷下的发射重量大大减轻。针对我国规划中的主带小行星采样返回任务,调研了国外离子电推进在深空探测任务中的应用情况,在借鉴国外成功经验和任务需求分析的基础上,设计了主带小行星探测器离子电推进系统方案和应用策略,计算了在目前离子推力器寿命水平下,既定探测任务对离子电推进推力、比冲、推进剂量以及功耗需求。研究表明,目前研制的离子推力器可以满足规划中的主带小行星探测任务需求。研究成果对探测器的方案设计有参考价值。
小行星探测;探测器;采样返回任务;离子电推进;应用方案
0 引 言
迄今为止,人类利用航天器对太阳系的大行星和小行星均开展了不同程度的探测。如果用传统的化学推进完成更复杂和更远的深空探测主推进任务,航天器需要携带巨大的推进剂量,发射重量变得很大。所幸的是,近年来国内电推进技术得到了快速发展,并且取得了空间飞行试验的成功[1]和通信卫星平台的应用[2]。兰州空间技术物理研究所正在研制用于深空探测的40 cm口径离子推力器(LIPS-400)。这为深空探测航天器采用电推进执行巡航阶段轨道机动任务奠定了良好基础。众所周知,离子电推进具有高比冲(≥3 000 s)、长寿命(≥15 000 h)和高度自主巡航等特点。采用离子电推进执行巡航阶段轨道机动任务,将使航天器在同样的有效载荷下的发射重量大大减轻。离子电推进在几次深空探测任务(如“深空1号” “黎明号”以及“隼鸟号”等)中的应用,表明了其显著的优越性。
本文在分析我国未来主带小行星探测采样返回任务的基础上,提出了离子电推进担任采样返回探测器往返全程主推进任务的系统方案设想,并对系统配置、应用策略、关键技术等进行了研究和分析。
1 国外深空探测离子电推进应用
1.1 美国“深空一号”(DS-1)离子电推进
DS-1航天器于1998年10月24日发射,目的是验证一些新的空间技术。其中最主要的验证技术之一就是离子电推进系统[3-4]。
DS-1的既定目标是对1992KD小行星的接近探测。扩展任务是对107PBorreiiy和19PWilson-Harrington彗星的探测。离子电推进系统的主要使命就是完成在航天器巡航阶段的主推进,同时承担部分时期内的俯仰和偏航控制任务。离子电推进系统设计计划使航天器总速度增量达4.5 km/s。
DS-1离子电推进系统(NSTAR)由1台30 cm离子推力器、1台电源处理单元(PPU)、1套氙气供给子系统(XFS)和1台数字控制与接口单元(DCIU)组成。单台推力器最大推力93 mN,最大比冲3 100 s,最大输入功率2 300 W。推力器安装在探测器-Z面。
在经过1个多月入轨后的测试后,从1998年12月开始,离子电推进系统在星上导航系统的自主控制下推进航天器向第一个探测目标1992KDBraille小行星前进。1999年7月,DS-1与小行星相遇,最近距离达到了26 km。随后DS-1对小行星进行了观测。在该阶段离子电推进系统累计工作了3 000 h左右。
2001年9月,在离子电推进系统推进下,DS-1航天器飞临Borrelly彗星,在距离Borrelly彗星2 170 km的轨道上对其进行了观测,获得了该彗星详细的照片和收集了它喷射出的气体和尘埃信息。2001年12月18日,地面控制人员发送最后一条指令关闭了离子电推进系统。在整个飞行任务中,离子电推进系统累计工作16 246小时,开关机200多次,共消耗氙气72 kg。
1.2 日本“隼鸟号”(HAYABUSA)离子电推进
“隼鸟号”(Hayabusa)探测器的任务是探测近地小行星25143Itokawa并获取样本返回。探测器重量510 kg。
发射“隼鸟号”探测器的主要目的是验证离子电推进性能[5-6]、自主航行和控制技术、小行星表面取样和返回技术。离子电推进系统承担的任务主要是巡航阶段主推进,此外,在某些阶段还承担轨道偏心修正、姿态控制和位置机动保持等任务。
Hayabusa于2003年5月9日发射。发射后的第一年在地球同步轨道上飞行,一年地球同步轨道补给了航天器足够的太阳能、温和的温度环境和足够的加速时间。航天器于2004年5月19日从4 000 km高度上空经过太平洋,当速度增加到4 km/s时,进入飞向目标小行星的转移轨道。2004年8月底,在距离目标小行星4 800 km的位置,机动任务交由双组元化学推进完成,航天器以9 m/s的速度接近目标。9月12日,Hayabusa到达目标并保持在其上空20 km的点上对小行星进行观测。2005年12月,Hayabusa在小行星Itokawa上着陆并取样返回。在着陆和返回过程中,由于动量轮失效造成探测器姿态控制失效。最后,利用Z轴的反作用轮、离子电推进系统推力矢量控制和光压力矩重新建立了姿态控制方案,使得探测器得以挽救,并顺利返回地球。2010年6月13日结束7年的太空旅行返回地球。全部航程约60亿km。离子电推进系统累积工作4万多h。
Hayabusa离子电推进系统由4台μ10微波放电离子推力器、4台微波功率放大器、3台电源处理单元(IPPU)、一套推进剂供给子系统、一台推力矢量指向机构(IPM)和一台离子推力器控制单元(ITCU)组成。4台离子推力器以阵列形式安装在同一个推力指向机构上,每次最多有3台推力器工作。离子推力器安装在航天器的-Z面上。
1.3 美国“黎明号”离子电推进
“黎明号”(Dawn)深空探测器于2007年9月27日发射,探测器初始重量1 218 kg,这是NASA第一次真正意义上利用离子电推进的科学探测任务。离子电推进提供发射后需要的全部ΔV,将近11 km/s。这项任务的目的是对太阳系主行星带中质量最大的小行星女灶神星Vesta和罗神星Ceres进行科学探测,以研究太阳系早期的形成条件和演变过程。
Dawn与两个小行星Vesta和Ceres交会,并进入它们的轨道,这是在太阳系内沿两个不同星体轨道飞行的首次任务,这个任务的推进由离子电推进系统来完成。离子电推进系统提供发射后的速度增量,以满足转移到Vesta、Vesta轨道捕获、变轨到Vesta科学探测轨道、脱离Vesta轨道、转移到Ceres、Ceres轨道捕获、转移到Ceres科学探测轨道等各个阶段的任务要求。
Dawn离子电推进系统[7-8]由两台数字控制与接口单元(DCIU)、2台电源处理单元(PPU)、一套氙气供给系统(XFS)、三台推力矢量调节机构(TGA)和3台30 cm离子推力器组成。2台控制单元互为备份,2台PPU向3台推力器供电,PPU1和PPU2交叉备份。PPU1可为T1或T3推力器供电,PPU2可为T2或T3推力器供电。每台PPU通过一组高电压继电器开关在两个推力器之间进行切换供电。离子电推进系统每次只有1台推力器工作,单台推力器工作参数与DS-1任务中的相同。
Dawn离子电推进系统工作功率范围设计在470~2 500 W,在这个功率范围内设计了16个独立的推进剂主流率设定点(工作点),使推力器在功率变化时能匹配工作,标记为TH0~TH15,每一个TH又被细分为7个功率等级,共有112个工作点,标记为ML0~ML111。
截止2012年4月,离子电推进系统已经成功地将Dawn探测器推进到Vesta小行星,并实现了Vesta轨道捕获、变轨到Vesta科学探测轨道以及在科学轨道上的观测等活动。从2012年5月开始,离子电推进系统正在将探测器向Ceres小行星推进,计划于2015年8月实现与该小行星的交会。
1.4 日本“隼鸟2号”离子电推进
日本的“隼鸟2号”(Hayabusa2)计划对近地小行星1999 JU3进行岩石取样返回探测。要求离子电推进系统产生的总速度增量约2.2 km/s。已经于2014年底发射。
Hayabusa2离子电推进系统[9]由4台μ10微波放电离子推力器、4台微波功率放大器、3台电源处理单元(IPPU)、一套推进剂供给子系统、一台推力矢量指向机构(IPM)和一台离子推力器控制单元(ITCU)组成。与Hayabusa相同。离子电推进系统总工作时间约41 100 h。
2 任务分析
假定我们对主带小行星的女灶神星Vesta开展取样返回探测任务,探测器任务指标估算如下:
1) 全程往返轨道控制的速度增量ΔV≥12 km/s;
2) 探测器干重1 500 kg;
3) 探测器能提供的最大功率8 000 W。
基于上述要求,若采用化学推进系统作为主推进,经计算燃料量将达到8万kg以上,占到探测器总湿重的90%以上。干重为10%比例的飞行器在工程上几乎是不可能实现的。
小行星质量小、重力加速度在10-4m/s2左右量级,相比火星、金星等大行星探测不会形成引力加速,在靠近小行星时不需要在短时间内提供较大的速度增量用以刹车制动。小行星探测[10]的这些特点非常适合利用小推力、高比冲的电推进作为主推进。对于姿态控制、着陆阶段和返回上升阶段的轨道控制任务可由化学推进完成。
采用电推进系统则燃料量只占探测器总重的25%(离子)或40%(霍尔),在探测器规模一定的情况下,可以大大减少燃料携带量,增加探测器干重,可以使整个工程方案更加合理。
巡航飞行期间探测器与太阳之间距离变化在几亿千米范围内,太阳常数变化范围较大,因此太阳阵功率密度变化达几倍之多。由于电推进工作需要的功率大,因此需要对探测器电源系统的方案和工作方式进行专门分析和设计,使电源系统满足电推进要求。同时,为了适应探测器与太阳距离变化而导致的太阳帆板输出功率下降,离子电推进系统可采用多种推力模式的工作方式。
电推进产生的推力与化学推进相比要小得多,因此对应用电推进的探测器必须在轨道控制策略上进行较大的调整,需对其发射轨道、中间飞行轨道进行重新反演计算。
电推进系统在巡航飞行时,一般都采用连续推进方式,一次工作几百上千小时。为了缩短到探测目标的飞行时间和节省推进剂,大多采用电推进系统推进与其它行星引力辅助作用相结合的轨道转移方式。
3 离子电推进系统应用方案
3.1 离子电推进系统推进剂与功率预算
离子电推进系统提供的探测器总速度增量按12 km/s计算,探测器干重按1 500 kg,离子推力器平均比冲按照4 000 s,推进效率按0.95计算,利用火箭方程[11]可以得到氙气需求量为555 kg,再考虑全程泄漏5 kg、剩余不可用5 kg、初期在轨测试用量5 kg和5%裕度,实际需要装载氙气597 kg。
离子电推进系统采用40 cm口径的离子推力器,单台工作时最大推力220 mN对应的输入功率为6 850 W,该功率由电源处理单元提供。电源处理单元的效率按92%计算,其输入功率为7 445 W。此外,离子电推进系统控制单元功耗不大于50 W,贮供单元功耗不大于80 W,单台矢量指向机构功耗不大于50 W。由于矢量指向机构一般在离子电推进系统不工作时开启,因此最终离子电推进系统工作时最大总功率需求为7 575 W。
3.2 离子电推进系统组成方案
提供探测器总速度增量达到12 km/s的离子电推进系统实际消耗推进剂为555 kg,输出推力为220 mN时,单台离子推力器的工作流率为5.0 mg/s,经计算推力器总工作时间为3万h。离子推力器的工作设计寿命为2万 h。由此可见,不考虑备份的话,系统配置2台LIPS-400离子推力器就可完成使命。
从简化配置和提高系统可靠性等不同角度出发,离子电推进系统考虑以下两种组成方案。
3.2.1 方案Ⅰ
该方案由1台离子电推进系统控制单元(DCIU)、2台LIPS-400推力器(T)、1个贮气单元(包括2个氙气瓶)、1台推进剂调压单元、2台电源处理单元(PPU)、2台推进剂流量调节模块和2个矢量调节机构(TGA)组成,如图1所示。PPU1和PPU2交叉互为备份,每台PPU通过一组高电压继电器开关在两个推力器之间切换供电。离子电推进系统每次只有1台推力器工作。
系统工作时,由上位机发出工作指令到离子电推进系统控制单元。控制单元通过选择可以控制1台PPU向2台推力器中的一台供电。同时控制单元控制贮气单元、减压单元和流量调节模块向对应的离子推力器供气。离子电推进系统每次只启动1台推力器工作。每台推力器配1个推力矢量调节机构,可以实现两个方向的推力矢量指向调节。

图1 离子电推进系统组成方案Ⅰ示意图Fig.1 Schematic diagram of the ion propulsion system designⅠ
3.2.2 方案Ⅱ
方案Ⅱ从提高系统可靠性角度出发,考虑关键单机的适当备份。离子电推进系统包括3台LIPS-400推力器、1台离子电推进系统控制单元、3个矢量调节机构、1个贮气单元(包括2个氙气瓶)、1台减压单元、2台电源处理单元、3台流量调节模块,组成示意图如图2所示。
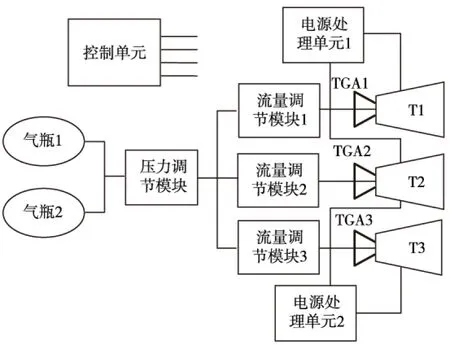
图2 离子电推进系统组成方案Ⅱ示意图Fig.2 Schematic diagram of the ion propulsion system designⅡ
如图2所示,PPU1可为T1或T2推力器供电,PPU2可为T3或T2推力器供电。每台PPU通过一组高电压继电器开关在两个推力器之间进行切换供电。离子电推进系统每次只有1台推力器工作。
3.2.3 方案的优选
方案Ⅰ的优点是系统组成相对简单,缺点是推力器没有备份,系统可靠性较低。
方案Ⅱ的优点是可靠性得到提高;缺点是系统较复杂。
方案Ⅱ中的控制单元、压力调节模块和流量控制模块单机不备份,但是内部电路或关键组件可以进行备份冗余设计。这样既提高了系统的可靠性,又使得系统干重和体积的增加不太明显。
综上所述,从保证任务成功的角度考虑,建议主带小行星探测器采用方案Ⅱ的离子电推进系统。
3.3 离子电推进系统工作模态
为了与不同太阳距离条件下太阳帆板输出功率的变化相匹配,离子推力器的工作功率范围设计在1 100~6 850 W之间可调节,在这个功率范围内可设计10个独立的工作模态,使推力器在输入功率变化时能匹配工作,标记为TM1~TM10。每一个TM又可以细分为5个功率等级,共有50个工作点。对于独立工作模态TM1~TM10,除了功率不同,每个工作点的流率也根据推力器性能匹配的需要不同。但是在每个独立的工作模态之间的细分工作点,流率与其对应的独立工作模态TM保持一致,只是对功率进行调节。根据对任务的分析,在主带小行星取样返回探测任务中,离子电推进系统的工作模态设计如表1所示。当探测器和太阳之间的距离变化,探测器的轨道机动推进可根据表1选择相应的离子推力器工作模态。
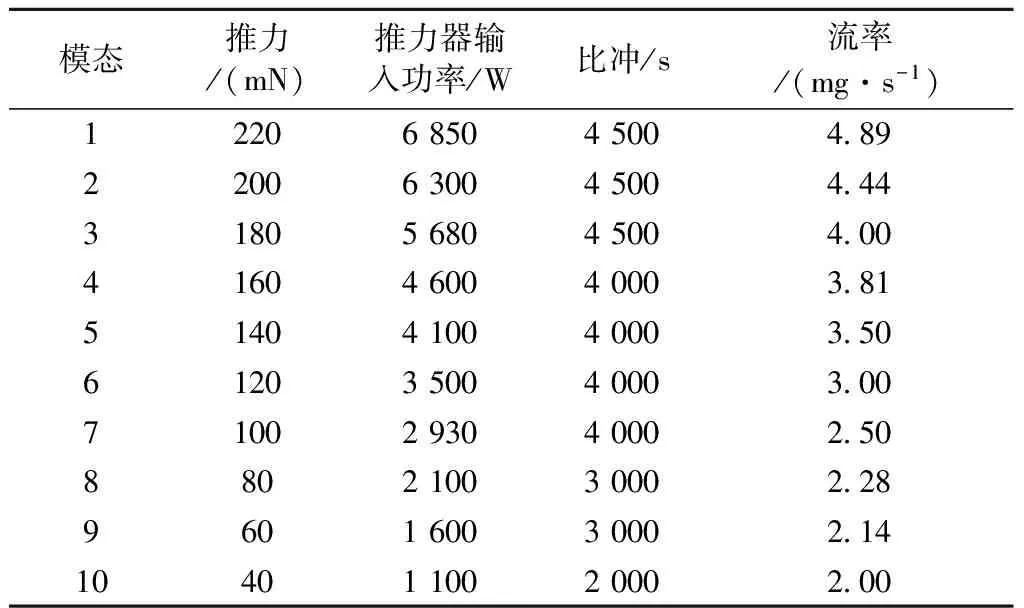
表1 离子推力器工作模态
3.4 星上布局与安装考虑
由于离子电推进系统主要承担主推进任务,因此推力器安装在探测器的-Z面上,为了变轨的需要离子推力器均配有推力矢量调节机构,以便根据需要随时调整推力矢量,同时使探测器的耦合力矩尽量小。此外,推力器布局还要考虑推力器的羽流,使安装在星体上的敏感设备和太阳帆板等尽量不受羽流的污染损害。离子电推进工作消耗的氙气占探测器重量的比例较大,因此氙气瓶一般布置在探测器飞行轴上靠近质心的位置。由于电源处理单元功效率较大,工作时的热耗较大,在安装布局时,需要重点关注其散热措施,一般均采用主动加被动的散热方式。
4 离子电推进关键技术
深空探测离子电推进系统由于其承担的任务和系统应用方案的特殊性,有其自身的技术特点。需要进行一些关键技术的攻关。主要关键技术有:系统集成技术和长寿命技术。
4.1 系统集成技术
由于主带小行星采样返回任务的特殊性,在离子电推进系统应用方案、指标、组成和配置等方面需要全新设计,几个重点需要解决的问题包括系统的组成关系、各单机设备在探测器上的布局和安装关系、系统主备份切换关系、系统工作时序和工作策略等。
4.2 长寿命技术
主带小行星采样返回任务对离子电推进系统的寿命要求较高,根据最大推力工作点的推力计算,完成10 km/s的速度增量需要单台推力器工作2万h左右。但是如前所述,由于探测器与太阳之间的距离变化,当探测器与太阳之间的距离较远时,太阳帆板输出功率下降,离子电推进有相当的时间工作在低推力,离子推力器实际工作寿命会更长。因此,系统长寿命尤其是离子推力器长寿命技术成为最关键的技术,需要对关键单机和部组件进行长寿命设计和验证。
4.3 推力(工作点)调节技术
离子电推进系统的工作点达50个之多,对于不同推力和比冲要求,需要进行推力器工作点优化研究。为了与推力器输入参数相匹配,需要研究解决电源处理单元参数和流率参数的大范围调节技术、离子推力器推力变化适应性技术和离子电推进系统匹配性技术。
4.4 地面验证试验技术
针对主带小行星采样返回任务特点,离子电推进系统需要在地面开展充分的系统集成试验和寿命试验,目的是验证离子电推进系统的集成性能和寿命指标,使系统满足任务应用要求,最终具备飞行条件。离子电推进系统集成试验的验证项目要覆盖系统设计功能和性能以及与整星相互效应。寿命试验主要对关键单机的设计寿命按照空间飞行条件进行验证。
5 结束语
主带小行星采样返回任务的工程实现,使得采用电推进作为巡航阶段主推进成为必然的选择。
近年来,随着离子电推进在航天器上的应用,离子电推进技术和产品成熟度大大提高,再加上针对深空探测应用离子电推进技术的研究和产品的研制,使得深空探测器选择离子电推进系统作为主推进成为现实的可能。
本文研究表明主带小行星探测器采用LIPS-400离子电推进系统方案完全能够满足任务需求。
纵观国外深空探测离子电推进发展历程,第一阶段的应用已经取得成功,离子电推进作为深空探测航天器主推进的优势得到充分体现。针对深空探测的新一代离子电推进研制在美国、日本和欧洲已经取得较大进展,有些已经列入深空探测实施计划。在借鉴国外成功经验的基础上,结合我国深空探测规划目标,及早开展更远深空探测使离子电推进的研制势在必行。
[1] Zhang T P. Initial elight test results of the LIPS-200 electric propulsion system on SJ-9A satellite[C]∥The 33nd International Electric Propulsion Conference, [S.l]:[s.n.], 2013:1-9.
[2] Zhang T P. The LIPS-200 ion electric propulsion system development for the DFH-3B satellite platform[J]. IAC-13-C4, 2013,4(10).
[3] Rawlin V K, Sovey J S, Hamley J A. An ion propulsion systemfor NASA’S deep space missions[R]. Albuquerque, New Mexico: AIAA, 1999.
[4] Rayman M D. The successful conclusion of the deep space 1 mission: important results without a flashy title[R]. California: Jet Propulsion Laboratory, 2003.
[5] Kuninaka H, Nishiyama K, Shimizu Y, et al. Flight status of cathode-Less microwav discharge engines onboard HAYABUSA asteroid explorer[C]∥The 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. [S.l]: AIAA, 2004:1-10.
[6] Kuninaka H, Shimizu Y, Yamada T, et al. Flight report during two years on HAYABUSA explorer propelled by microwave discharge ion engines[C]∥The 41th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. [S.l]: AIAA, 2005:1-8.
[7] Brophy J R, Marcucci M G, Ganapathi C B, et al. The ion propulsion system for dawn[C]∥The 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. [S.l]: AIAA, 2003:1-8.
[8] Garner C E, Rayman M D, Brophy J R. in-flight operation of the dawn ion propulsion system through start of the vesta cruise phase[C]∥The 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit. [S.l]: AIAA, 2009:1-21.
[9] Nishiyama K, Hosoda S, Ueno K, et al. The ion engine system for hayabusa2[C]∥The 32nd International Electric Propulsion Conference[S.l]: [s.n.], 2011:1-7.
[10] 尚海滨,崔平远,熊旭,等.载人小行星探测目标选择与轨道优化设计[J].深空探测学报,2014,1(1):37-43. [Shang H B, Cui P Y,Xiong X,et al. Target selection and trajectory design for manned asteroid missions[J]. Journal of Deep Space Expioration, 2014,1(1):37-43.]
[11] Goebel D M, Ktz I, Fundamentals of electric propulsion: Ion and thruster[M]. La Canada Flintridge: Jet Propulsion Laboratory, 2008:15-17.
[责任编辑:宋宏]
Application Scheme of Ion Electric Propulsion System for Main-Belt Asteroid Sample and Return Mission
YANG Fuquan1, ZHAO Yide1, LI Juan1, GENG Hai1, ZHANG Tianping1, ZHOU Haiyan2
(1.Lanzhou Institute of Physics, Lanzhou 730000, China; 2.Shanghai Institute of Satellite Engineering,Shanghai 210000, China)
Due to the ion electric propulsion high specific impulse feature, the launch weight of the spacecraft will be greatly reduced under the same payload to implement the orbit maneuver of an asteroid exploration. The application of ion electric propulsion in deep space exploration is investigated in this paper. On the basis of the successful experience of foreign countries and the analysis of the requirements of the task, the scheme and application strategy of the ion electric propulsion system are designed, and its thrust ,specific impulse, propellant weight and power are calculated for the main-belt asteroid exploring spacecraft to meet the present life level of ion thruster. The research results show that the developing ion thruster can meet the requirements of the main-belt asteroid exploration mission and have reference value for the design of the spacecraft.
asteroid exploring; spacecraft; sample and return mission; ion electric propulsion; application scheme
2015-01-16
2015-06-23
国防重点实验室金项目(9140C550206130C55003)
V439
A
2095-7777(2015)02-0168-06
10.15982/j.issn.2095-7777.2015.02.011
杨福全(1969—),男,高级工程师,主要研究方向:主要从事空间电推进技术研究。 通信地址:兰州市城关区雁兴路108号,兰州空间技术物理研究所(730000)。 电话:(0931)4585956 E-mail:yfq51007@sina.com
猜你喜欢
军事文摘(2022年24期)2023-01-05
军民两用技术与产品(2022年10期)2022-11-30
今日农业(2022年2期)2022-11-16
空间控制技术与应用(2021年1期)2021-04-25
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
太空探索(2016年1期)2016-07-12
太空探索(2015年6期)2015-07-12
太空探索(2014年11期)2014-07-12
