
宇航员手持式高频冲击采样装置的设计研究
2015-04-18 09:11陈化智姜生元张明张玉良沈毅全齐全梁鲁张志贤
深空探测学报 2015年2期
陈化智,姜生元,张明,张玉良,沈毅,全齐全,梁鲁,张志贤
(1.哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150080; 2.北京卫星制造厂,北京 100080;3.中国空间技术研究院 载人航天总体部,北京 100094)
宇航员手持式高频冲击采样装置的设计研究
陈化智1,姜生元1,张明2,张玉良2,沈毅1,全齐全1,梁鲁3,张志贤3
(1.哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150080; 2.北京卫星制造厂,北京 100080;3.中国空间技术研究院 载人航天总体部,北京 100094)
获取具有原态层理信息的月壤剖面样品是我国载人登月人工采样任务的重要目标之一。对比国外地外天体采样技术,提出了一种适合宇航员手持操作的高频冲击式采样装置。采样装置采用高频冲击作用下颗粒的单向运移原理,可保证样品的原态层理信息,降低了采样功耗,提高了取芯率;取芯机构表面的各向异性摩擦形貌增强了颗粒单向运移效果,提高了采样效率;改变冲击频率进行取芯试验,得到了冲击频率与表面形貌对取芯率的影响规律,为我国载人登月人工采样装置的设计研究提供技术参考。
人工采样;高频冲击;单向运移;应力波
0 引 言
月球是距离地球最近的地外天体,有着丰富的矿物资源,所以月球将会是人类对地外天体资源开发的第一站[1-2]。对月壤样品进行分析,可以获得月球的土壤结构及矿物元素信息,为开展月球资源开采工程作铺垫,因此,宇航员在月面上获取具有原态层理信息的月壤剖面样品是载人登月任务中的重要项目之一。
获取具有层理信息的月壤样品有两种方式:一种是以前苏联Luna系列探测器[3]为代表的无人回转钻取采样;另一种是美国Apollo载人登月任务[4]中的冲击贯入式人工采样,即通过宇航员手动敲击取芯管获取月壤样品。
对做回转运动的空心钻杆施加轴向力使之持续钻进,通过钻杆外壁的螺旋槽排屑,而样品则保存在钻杆内部。这种回转钻取采样方式可以获取保持一定层理信息的样品,但钻杆的回转运动使钻杆内壁附近的样品颗粒混合起来,无法保持原态的层理信息。此外,排屑槽堵塞时,将使功耗急剧增加,且容易发生故障。与回转钻取采样方式相比,冲击贯入式取芯对样品层理信息的保持性更加良好。然而,低频冲击作用下,取芯管附近的月壤颗粒受挤压致密产生力链,导致月壤颗粒与取芯管表面的摩擦力增大,增加了能量的消耗并阻碍样品的采集。高频动态冲击产生的应力波可以破坏力链的形成,降低了采样需求的能量,并能够驱使取芯管表面的月壤颗粒向月面定向运动,若采用具有各向异性摩擦表面形貌的取芯管,则能够增强月壤颗粒的运移效果,从而提高取芯率。
因此,为降低采样工具的能耗,提高取芯率,并获取良好层理信息的月壤样品,应采用高频动态冲击贯入的方式进行采样。本文对冲击贯入式取芯涉及的应力波传递特性[5-6]、颗粒单向运移机理和各向异性摩擦表面形貌特征三项关键技术进行了分析。针对月面人工采样装置的高取芯率、高层理信息保持性等性能要求,设计了一种便于宇航员操作的月壤采集装置。利用该采样装置的原理样机开展变频率模拟采样试验研究,分析了在恒定钻压力下冲击频率与表面形貌对取芯率的影响规律。本文的研究内容可为我国未来拟开展的人工采样装置的设计提供参考。
1 高频冲击贯入式取芯过程分析
冲击贯入式取芯一般是指手动敲击薄壁取芯管,将其打入地面,样品直接存储在取芯管中的一种取芯方式。由于手动敲击的频率较低,每次敲击时月壤几乎无动态响应,因此称之为静态冲击贯入式取芯,这种取芯方式广泛应用于地质勘探任务中。
然而,静态冲击贯入式取芯虽然能获取具有良好层理信息的样品,但无法保证100%的取芯率,即取芯管内的样品长度低于取芯管进入地面的深度,甚至低于50%。以下将对静态冲击贯入式取芯过程进行分析。
取芯管在瞬态冲击力FIM的作用下贯入月面深度为HIM,月壤的压缩性使其受到取芯管的挤压后体积减小,与管壁间的摩擦阻力FIF增大。此外,月壤的颗粒形态导致颗粒之间在受力作用下发生自锁效应,形成“力链”,进一步阻碍了颗粒的流动。此时留存于取芯管内的样品长度HSM低于贯入深度。当冲击力不足以克服摩擦阻力时,继续施加冲击,贯入深度将不再增加。研究资料表明,“力链”的分布及强弱与取芯管的长径比LTC/DTC有关,长径比越大,“力链”分布越广泛,强度越大。取芯过程如图1所示。

图1 静态冲击贯入式取芯Fig.1 Static impact type penetration coring
高频冲击可以解决以上问题。如图2所示,对取芯管施加较高频率的冲击,取芯管中的冲击能量破坏了“力链”的形成,使取芯管管壁附近的月壤变得疏松,减小了月壤颗粒与管壁间的摩擦阻力。同时,取芯管表面的松散月壤颗粒在冲击应力波的驱动下向月表方向做定向运动,外壁附近的颗粒被排出到月表,内壁附近的颗粒则被向上输送,使样品长度与取芯管的贯入深度保持一致,实现“无滑差”取芯。此外,对取芯管表面进行处理,形成各向异性摩擦表面形貌,使月壤颗粒在运移方向上受到的摩擦阻力较小,反方向受到的摩擦阻力较大,则将增强单向运移效果,提高取芯效率。

图2 高频冲击贯入式取芯Fig.2 High-frequency impact type penetration coring
因此,为在保持月壤样品原态层理信息的基础上提高取芯率,降低采样功耗,应采样高频冲击贯入式取芯方法。同时,在采样器设计的过程中要考虑到取芯管中应力波的传递特性、颗粒单向运移特性以及取芯管表面的各向异性摩擦形貌。
2 采样装置的方案设计
2.1 采样装置的设计要求
宇航员操作的冲击贯入式月壤采样器应具备以下几个特点:
1)系统构造要简单,功耗低。过于复杂的机构在工作过程中容易出现故障,而过高的驱动能量在月面环境下无法提供。
2)冲击频率与冲击功可以调节。采集不同深度的月壤需要的能量不同,实时调整冲击频率能够提高采样效率;此外,高取芯率下采集的样品才能够最大程度地保持层理信息。
3)取芯管可以自由组接。采集深层样品需要增加取芯管的长度,过长的取芯管不便于运输和宇航员操作,故需要多段取芯管组接完成。
采样装置的特点及技术指标如图3所示。

图3 采样装置的特点及技术指标Fig.3 Characteristics and technical indexes of sampling device
本设计为地面环境试验使用,可暂不考虑功耗限制条件。为保障输出动力充足,以及后续研究的需要(提高采样深度,破碎岩石等),参考Apollo月表钻机的功率参数(约456W)[4],确定出本采样装置的设计参数如表1所示。

表1 采样装置的设计参数
2.2 采样装置的系统组成及工作原理
采样装置由冲击驱动机构、取芯机构、取芯接口和支撑单元4部分组成,如图4所示。冲击驱动机构为采样装置提供冲击动力;取芯机构包括组接杆、取芯管以及组接接口,用于获取月壤样品;取芯接口连接冲击驱动机构与取芯机构;支撑单元为其他机构提供支撑,并为宇航员提供手持操作的接口。

图4 冲击贯入式月壤采样器的工作原理Fig.4 Working principle of sampling device
采样工作过程中,宇航员为采样器提供向下的钻压力,同时,冲击驱动机构对取芯管施加一定频率的冲击,产生的应力波经由取芯接口传递到组接杆和取芯管。当冲击应力超过月壤的固结强度时,密实的原态月壤便会被破碎。同时,在冲击作用下取芯管外表面的各向异性摩擦表面形貌将促进取芯管附近的月壤颗粒向上运动并排到月表,内表面的形貌破坏颗粒与管壁间力链的形成,使样品保持原有状态进入到取芯管中。在钻压力和冲击力的作用下,取芯管持续深入月面。当第一根取芯管达到预定的采样深度后将其取出,组接第二根并继续采集样品。采样结束将各段取芯管封装,完成采样任务。
3 采样装置的结构设计
根据采样器的设计方案,对冲击驱动机构、取芯机构、取芯接口以及支撑单元进行详细结构设计,满足功能和研制要求,并将各单元进行系统集成,完成冲击贯入式月壤采样器的结构设计。
3.1 冲击驱动机构
冲击驱动机构由激振电机、传动齿轮、凸轮机构和导向机构组成,如图5所示。为降低机构的复杂程度,将传动大齿轮与圆柱凸轮设计成集成式。

图5 冲击驱动机构的组成Fig.5 Composition of impact drive mechanism
传动齿轮安装于齿轮箱内部,两端由轴承支撑,齿轮箱由上盖和下盖组成;激振电机固定于齿轮箱上盖,电机输出轴通过平键与小齿轮连接,将驱动力矩经齿轮传递于与大齿轮一体式的圆柱凸轮上,从而驱动凸轮转动;作为从动件的激振块在凸轮的推动下向上运动,压缩激振弹簧使之储存能量,当激振块上的滚子越过到凸轮轮廓的最高位置时,激振弹簧释放能量,使激振块迅速复位完成一次激振。
3.2 取芯机构
取芯机构承受来自激振块的冲击能量,并以应力波的形式在整套机构内传递,完成对月壤的剪切与采集,包括取芯管、组接杆以及组接接口,为防止在转移过程中样品泄漏,在取芯管前端安装有防漏膜瓣,各结构如图6所示。

图6 取芯机构的组成Fig.6 Composition of coring mechanism
组接接口承接组接杆与取芯管,为简化结构的复杂度,利用取芯管尾端和组接杆前端组成,故不单独设计。微观形貌不便于制造和研究,因而采样机械加工方法在取芯管与组接杆表面加工出锯齿形形貌,锯齿形貌截面的后倾角取75°,横向长度0.5 mm,径向高度0.3 mm。防漏膜瓣的主体由8片0.15 mm厚的弹簧钢片构成,采样时受月壤挤压力FTB而展开,采样结束后在样品的重力作用下返回原状。
3.3 取芯接口
取芯接口由导套和直线轴承组成,如图7所示。由于取芯管尾部结构装配空间所限,普通直线轴承难以满足要求,故而采用钢球保持架替代。钢球保持架安装在导套内,长度小于取芯管轴颈段长度δ=2 mm,可满足取芯管做小幅度运动,以便获取最大的冲击能量。
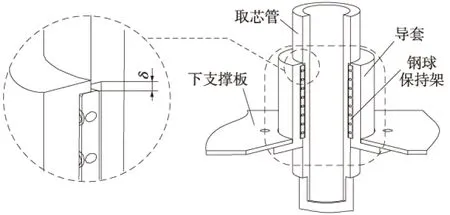
图7 取芯接口Fig.7 Interface of coring mechanism
3.4 支撑单元
支撑单元由支撑架、上支撑板、下支撑板和把手组成,如图8所示,其中支撑架由30 mm×30 mm×2.5 mm的方钢管焊接而成,以保证结构的强度和刚度。理论上支撑单元不承受过大的载荷和振动,但实际操作中会不可避免,因此,在把手上增加橡胶套以减缓振动对操作者的影响。

图8 支撑单元Fig.8 Supporting mechanism
3.5 采样装置的系统集成
将各功能单元集成一体,完成采样装置的全部设计工作,图9所示为采样装置的三维模型与原理样机。样机包络尺寸1 185 mm×650 mm×320 mm,重16.7 kg。

图9 采样装置集成系统及原理样机Fig.9 Integrated system and principle prototype of sampling device
4 采样试验研究
利用采样装置原理样机开展采样试验研究,采集对象为吉林省靖宇县的红色火山灰配制的模拟月壤。试验内容如下:
1)冲击功设定为3.5 J,调整激振电机转速,使冲击频率达到5 Hz,以具有各向异性摩擦表面形貌的取芯管(特制取芯管,图10所示)为试验对象进行采样试验,测量贯入深度LTS与样品长度lTS,计算取芯率
(1)
增加冲击频率,每5 Hz重复试验一次,直至增加到60 Hz为止,记录每次试验结果。
2)以表面光滑的取芯管(图10)为试验对象,保持贯入深度LTS相同,重复步骤1),记录试验结果。(注:光滑取芯管与特制取芯管的结构和尺寸均相同,仅表面形貌不同)
将试验结果进行整理,绘制冲击频率-取芯率变化曲线,如图11所示。

图10 特制取芯管与光滑取芯管Fig.10 Specially made coring tube and smooth coring tube
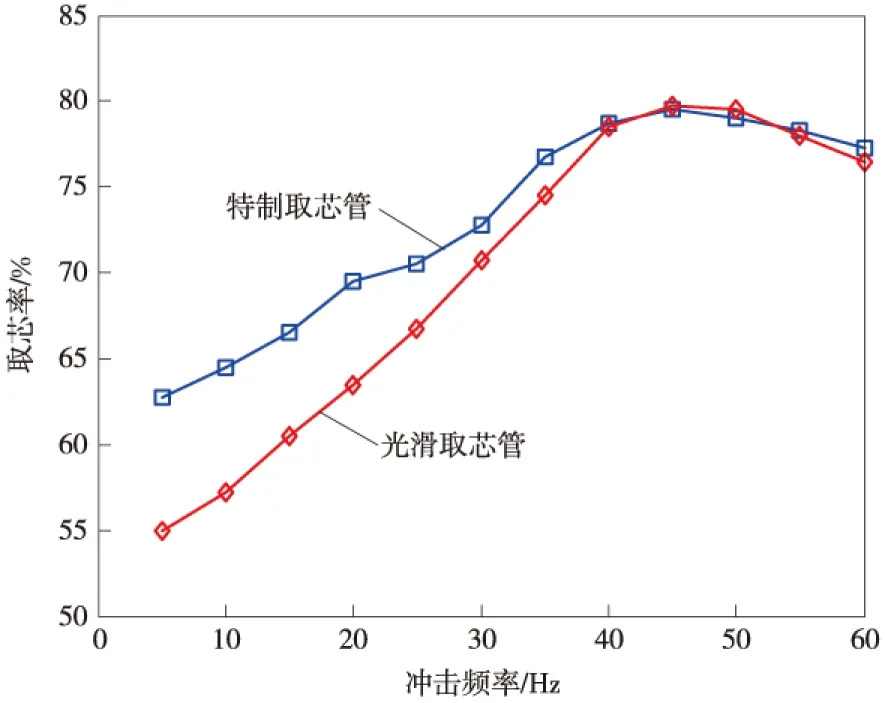
图11 采样试验结果Fig.11 Results of sampling experiment
光滑取芯管与特制取芯管的取芯率变化趋势相同。在激振频率低于45 Hz时,取芯管中传递的能量较小,模拟月壤颗粒的运动幅度小,特制取芯管的各向异性摩擦表面形貌对颗粒下落的阻碍效果较强,因而特制取芯管的取芯率高于光滑取芯管的取芯率;随着激振频率的增加,取芯管中传递的能量较大,模拟月壤颗粒的运动幅度增大,逐渐超过特制取芯管表面形貌的几何尺寸,各向异性摩擦表面形貌对颗粒下落的阻碍效果减弱,所以两种取芯管的取芯率差异逐渐减小,甚至相同。
5 结 论
本文针对我国未来开展的载人登月人工采样任务设计了一种宇航员手持式采样装置,用以采集原态的深层月壤样品。主要工作与结论如下:
1)针对静态冲击贯入法取芯率低的问题,提出了高频冲击贯入式取芯方法,并指出了该方法所涉及的关键科学问题:应力波的传递特性、颗粒的单向运移特性及各向异性摩擦表面形貌特征。
2)基于高频冲击贯入式取芯的原理,设计了一种适用于宇航员手持操作的高频冲击贯入式采样装置。该采样装置在工作过程中可改变冲击频率(0~60 Hz)与冲击功(2~4 J),以适应不同工作环境。组接式的取芯管能够获取深层的月壤样品。
3)通过模拟采样试验发现,该采样器在一定频率范围内(0~45 Hz),取芯率随冲击频率的增加而提高,超过该频率后则有所降低,即存在一个最优频率(45 Hz)。取芯管的各向异性摩擦表面形貌在低于最优频率时可提高取芯率,最大提高量近10%。增加冲击频率,提升效果逐渐降低。
载人登月人工采样任务中,采样装置不但能采集具有原态层理信息的月壤样品,而且要便于宇航员操作。故要求采样装置的结构简单,质量轻,对宇航员的反作用力小。高频冲击式采样装置可以满足以上要求。因此,高频冲击式采样装置在我国载人登月人工采样任务中有着广阔的应用前景。在今后的研究工作中,将开展高频冲击式采样装置的优化设计,实现低功耗、轻量化、高取芯率的目标。
[1] 彭兢,黄昊,向开恒,等.月球无人采样返回任务概念设想[J].航天器工程,2010,19(5):99-104. [Peng J, Huang H, Xiang K H, et al. Conception design of a lunar robotic sampling and return mission[J]. Spacecraft Engineering, 2010,19(5):99-104.]
[2] 欧阳自远.我国月球探测的总体科学目标与发展战[J].地球科学进展,2004,19(3):351-358.[Ouyang Z Y. Scientific objectives of chinese lunar exploration project and development strategy[J]. Advance in Earth Sciences, 2004,19(3):351-358.]
[3] Kashkarov L L, Genayeva L I, Lavrukhina A K. The radiation history of material returned by the Soviet automatic stations Luna 16 and Luna 20, according to track studies[J]. NASA Special Publication, 1977(370):745-754.
[4] 杨帅,孙京,殷参,等.地外星体土壤取样机构技术[J].航天器工程,2011,20(4):137-146. [Yang S, Sun J, Yin S, et al. Soil sampling technology on extraterrestrial bodies[J]. Spacecraft Engineering, 2011,20(4):137-146.]
[5] 王礼立.应力波基础[M].国防工业出版社,2005. [Wang L L. Foundation of stress waves[M]. National Defense Industry Press, 2005.]
[6] Mobarakabadi S, Oskoee E N, Schröter M, et al. Granular transport in a horizontally vibrated sawtooth channel[J]. Physical Review E, 2013,88(4):042201.
[责任编辑:高莎]
High-Frequency Impact Handheld Sampling Device for Astronaut
CHEN Huazhi1, JIANG Shengyuan1, ZHANG Ming2, ZHANG Yuliang2, SHEN Yi1, QUAN Qiquan1, LIANG Lu3, ZHANG Zhixian3
(1.State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China; 2.Beijing Satellite Manufacture Factory, Beijing 100080, China; 3. Institute of Manned Space System Engineering, CAST, Beijing 100094, China)
Obtaining primary lunar regolith with bedding information is one of the important targets in China’s lunar-landing and manual sampling project. A high-frequency impact handheld sampling device suitable for astronauts is designed comparing with foreign sampling techniques. The sampling device uses particle’s single-direction motion in high-frequency impact, which can keep sample’s primary bedding information, reduce power consumption, and increase coring ratio. Particle’s single-direction moving effect and coring ratio will be increased through anisotropic friction morphology on coring mechanism surface meanwhile. Law of coring ratio affected by impact frequency and surface morphology has been obtained via variable frequency coring experiment, which can be technical reference for the design of manual sampling device in China’s lunar landing project.
manual sampling; high-frequency impact; single-direction motion; stress wave
2014-10-16
2015-02-30
国家国际科技合作专项项目(2014DFR50250);载人航天领域预先研究项目(050102)
V19
A
2095-7777(2015)02-0131-06
10.15982/j.issn.2095-7777.2015.02.005
陈化智(1989—),男,博士研究生。主要研究方向:宇航空间机构及控制。 通信地址:哈尔滨工业大学科学园3037信箱(150080) 电话:(0451)86413857 E-mail:chen_huazhi@163.com
猜你喜欢
军事文摘(2022年18期)2022-10-14
科学大众(2022年17期)2022-09-22
小哥白尼(趣味科学)(2022年6期)2022-08-17
青少年科技博览(中学版)(2021年11期)2021-03-07
材料科学与工程学报(2016年4期)2017-01-15
中国光学(2015年1期)2015-06-06
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年6期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
创业家(2015年4期)2015-02-27
