塔式起重机运行状态监控系统的应用
2015-04-16 02:37:50谢恩来
电气传动自动化 2015年2期
谢恩来
(清远市建筑施工安全检测服务中心,广东 清远 511515)
1 概述
近年来,塔式起重机以其高效的垂直运输能力使其应用越来越广泛,但同时也造各类运行安全事故频发,已占各类工地重特大安全事故的30%。在所有塔机事故中,安全保护装置缺失或失效占了很大部分,调查表明,在被调查的塔机中有40%是小车变幅限位失效。在这些安全装置中,起重力矩限制器失灵造成的超载事故比较多[1],因此,提高塔机使用安全性和可靠性是非常必要的。
2 塔机结构及安全保护装置
2.1 塔机结构和现有安全保护装置及其缺点
塔机的作业空间大,是在三维空间内运行,塔机的运转是靠不同机构来实现的,常见的是由起升机构、变幅机构、回转机构和行走机构相互配合来完成的。目前塔机上装设的安全装置主要有两大类:行程限位器和超载限制器。行程限位器包括起升高度限位器、变幅幅度限位器、回转角度限位器和速度限制器。超载限制器包括起重量限制器和起重力矩限制器。
现有这些限制器都属机械机构式保护装置,存在以下缺点。
(1)保护装置仅在到达极限状态时才突然发生作用而无法在接近极限状态时发生提示,容易发生危险。
(2)保护装置无法完成工作过程中有关参数的显示,司机不能做到心中有数。
(3)保护装置无自检功能,一旦损坏不能被及时发现,存在安全隐患问题。
(4)现代建筑施工现场,为了加快施工进度,降低成本,经常要求塔机处于饱和工作状态,以充分使用塔机的作业能力,而一旦达到极限状态,安全保护装置起作用,塔机就断电停机,这样不但大大降低了工作效率,而且突然停机的冲击动载荷更加大了塔机运行的危险性。
2.2 安全监控系统监测原理
针对上述问题,在分析塔机结构及其安全性能要求的基础上,开发研制了实用有效的塔机监控系统。综合考虑塔机运行机构的原理,最终确定了实时检测的参数有:起重力矩、起重量、变幅位置、变幅速度、起升高度、起升速度、回转角度等。
变幅幅度和速度检测示意图如图1所示。当变幅电机带动小车牵引卷筒转动时,小车向收绳端移动。由于牵引卷筒直径已知,通过测量卷筒的转数和转动方向即可计算出小车的变幅位移和方向,幅度检测可用测量角位移的传感器实现,这里选用增量式光电编码器。将传感器安装在导向定滑轮处比较合适,通过测量与定滑轮同步旋转的传感器输出的脉冲个数即可求出小车的变幅位置。
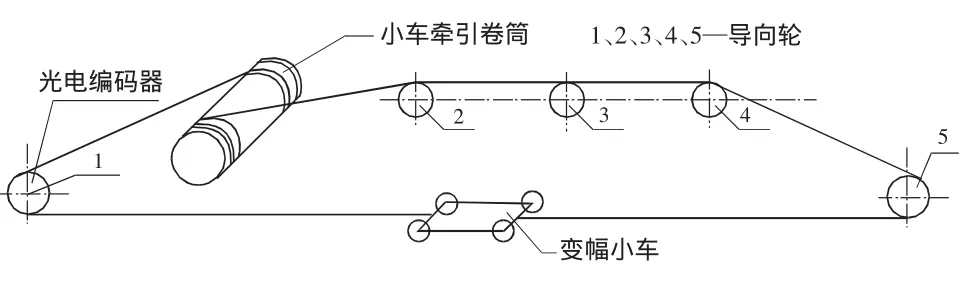
图1 变幅机构示意图
起升高度监测和起升机构钢丝绳穿绕示意图如图2所示。起升钢丝绳一端固定于塔尖,另一端缠绕在起升卷筒上,当起升电动机带动起升卷筒向不同方向旋转,通过传动机构和换向轮就变为吊钩的垂直上下运动。若定滑轮直径已知,则当滑轮组倍率为2时,定滑轮周长与转数的乘积即为起升位移的两倍。因此,可以通过测量导向滑轮的角位移间接测出起升高度。选用增量式光电编码器作为传感器。
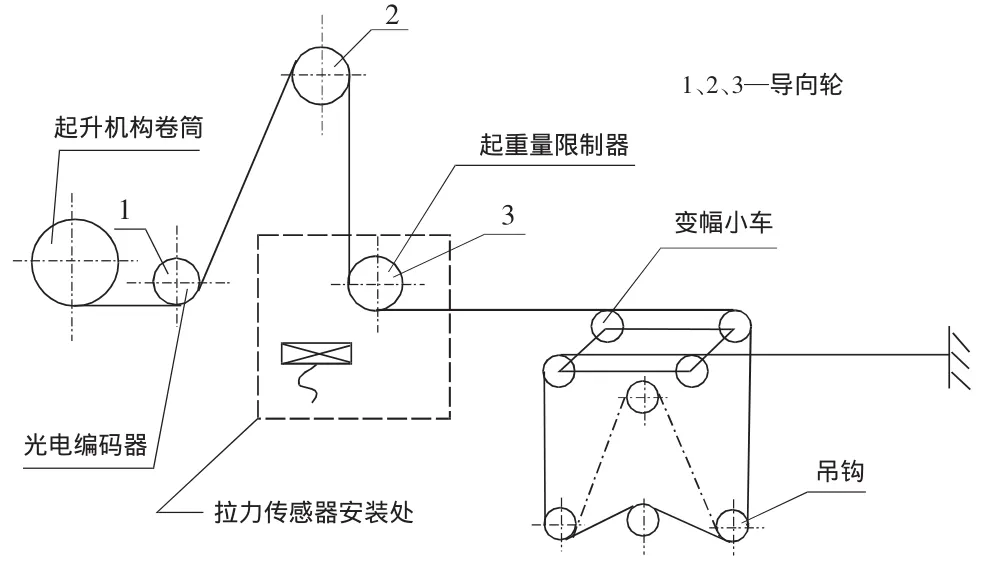
图2 起升钢丝绳穿绕及起升高度传感器安装示意图
回转角度测量示意图如图3所示。当臂架回转时,上转台带动限制器转动,小齿轮1一方面围绕回转大齿圈转动,一方面绕自己轴线自转。小齿轮的自转带动丝杠3旋转,从而驱动螺母2带动电位器式位移传感器6。螺杆转动带动触点沿电位器滑动。已知螺杆螺距以及电阻变化量即可计算出回转角度。图中保留了原有的左右回转限位器,用于回转极限的限位保护,而位移传感器测量出的角度可用于软件设定塔机回转的工作范围。
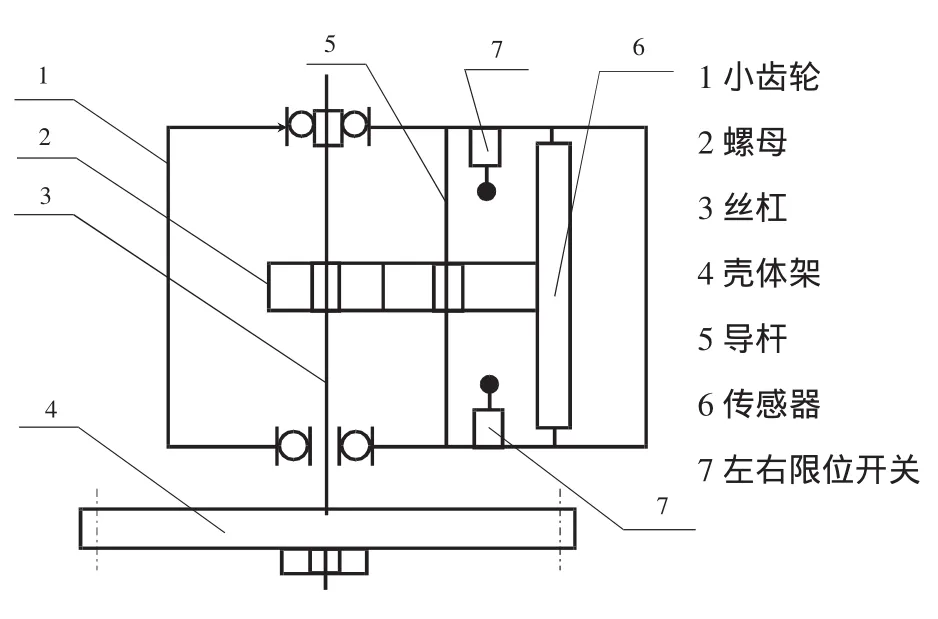
图3 回转角度测量传感器安装示意图
起重力矩监测示意图如图4所示。在原有弓形弹性钢板原有结构的基础上,用位移传感器检测弓形钢板中点的绕曲位移,通过定量分析钢板绕曲位移与力矩之间的关系,可实时测量并显示塔机所承受的起重力矩。
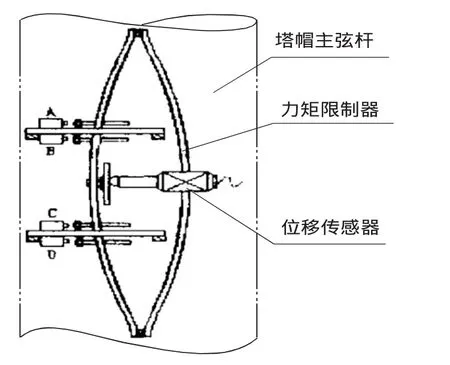
图4 起重力矩监测装置示意图
拉力传感器安装示意图如图5所示。当吊起重物时,吊重的作用使钢丝绳受拉,钢丝绳所受合力使摆杆逆时针转动,力臂摆杆传递给弹簧拉杆,拉力传感器位于拉杆与弹簧之间,由于摆杆长度已知,通过力矩平衡关系以及钢丝绳的倍率关系即可求出起重量的大小。
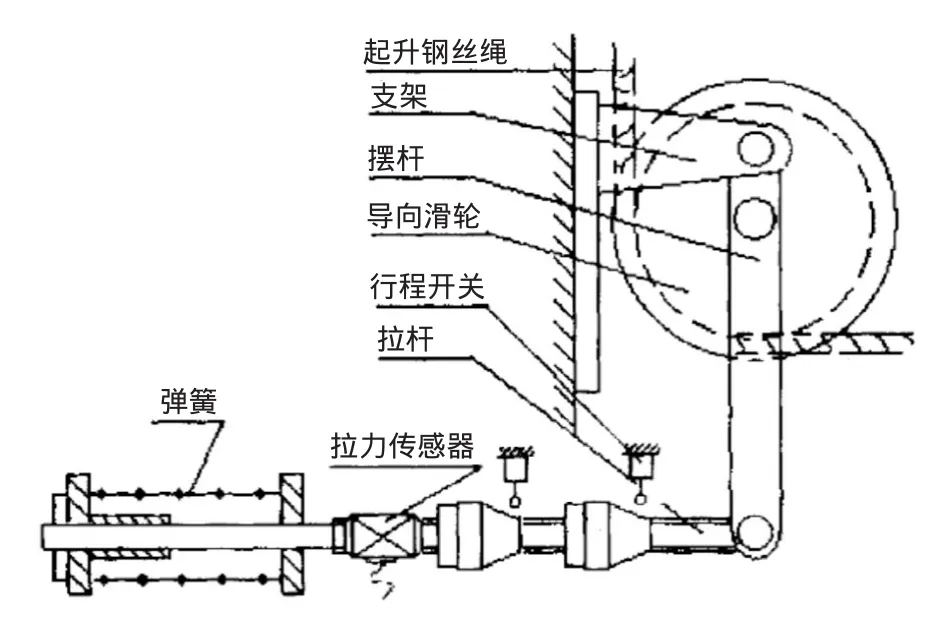
图5 拉力传感器安装示意图
3 系统整体设计
系统整体结构框图如图6所示。塔吊前端监控装置和后端远程监控平台在对塔吊实现现场安全监控、运行记录和声光报警的同时,通过远程高速无线数据传输,将塔吊运行工况的安全数据和报警信息实时地发送到远程GIS可视化监控平台,并能在报警时自动触发手机短信向相关人员告知,从而实现实时动态的远程监控、远程报警和远程告知。
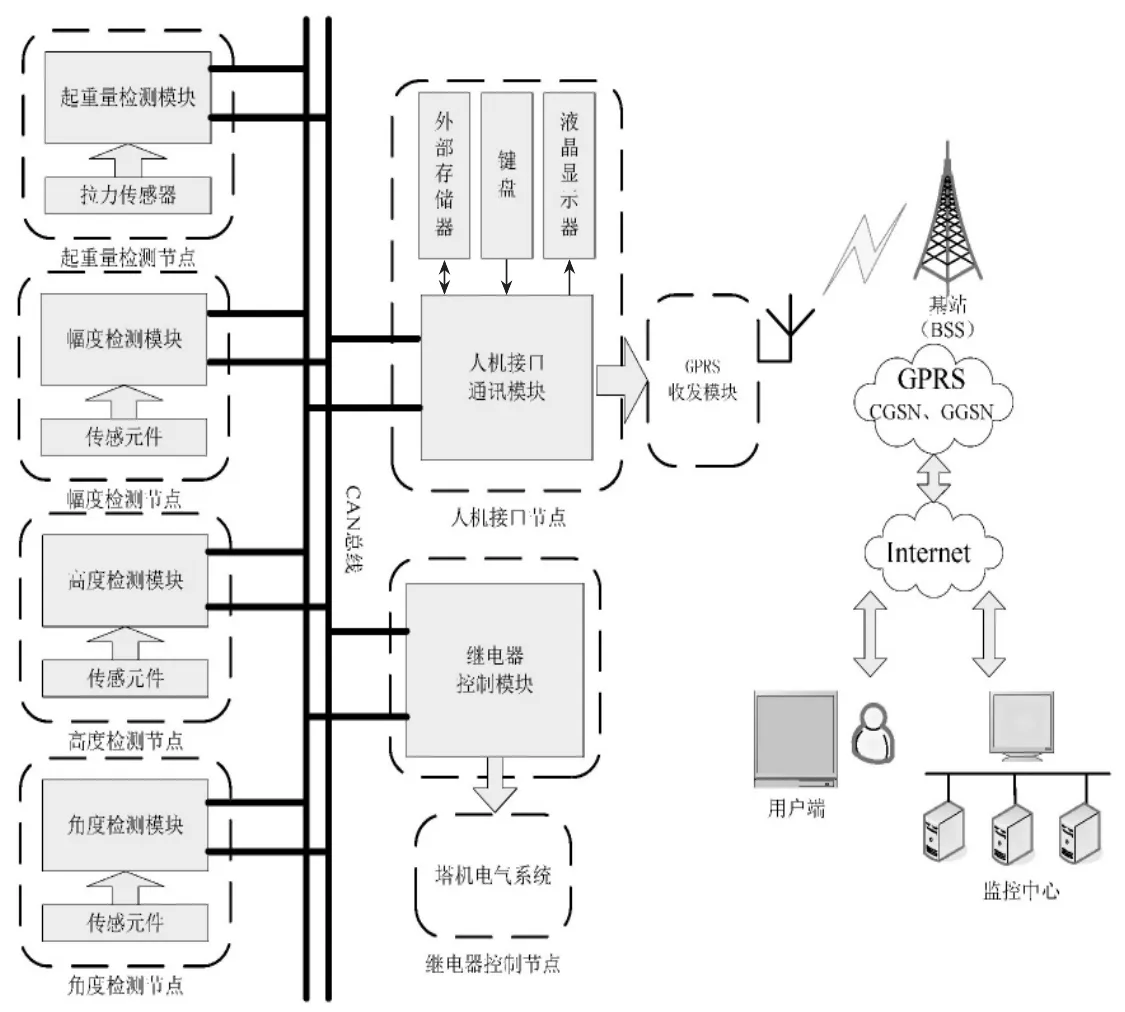
图6 系统整体结构框图
该监控系统的工作原理为各传感检测节点集成了传感功能和数据处理功能。系统不仅可以检测起重机的相应工作参数和状态信息,还可对该信息进行处理,再发送到总线上。继电器控制节点与起重机自身的电气系统相连接,提供完备的参数超限保护功能,能有效阻止危险操作,防止事故发生。人机接口节点可实时显示起重机工作参数,方便操作人员直观了解起重机状态,并能实时存储起重机的工作记录,包括系统内部存储或者外部U盘存储,为日后起重机维护和事故处理提供了可靠的数据支持。GPRS网络根据相应的协议在智能终端和Internet监控中心之间建立一条支持TCP/IP的数据通道,监控中心把通过这条通道传送来的起重机位置数据和工作参数信息存储到数据库中,后台服务软件读取并显示这些数据,实时监管起重机的工作情况。此外,后台服务软件还提供支持用户权限的访问界面,即无论何时何地,用户只要通过用户名和密码并借助浏览器访问这个平台,便可实现对起重机机群信息的运行管理。
4 系统数据远程传输介绍
系统软件实现数据传送首先要对数据中心的监控主机进行初始化,将主机建立网络连接,分配IP地址,设置好通信波特率和通信端口。监控中心是整个安全监控系统的操作、维护、处理、统计、分析和监控的中心。其次对数据采集终端的主机进行初始化设置,将通信波特率与远程主机同步,然后进行拨号连接,将终端的类别设置为GPRS永远在线上网模式,保持和维护链路的连接,并分配IP地址。GPRS无线模块接收到监控中心的主机IP地址后将其存入数据终端的配置地址域中。
监控中心接收端的主界面如图7所示。在监控中心的主界面电子地图上可以显示出用户位置,移动鼠标图标可动态显示用户当前运行的主要数据(载重、幅度、力矩、高度、角度),并实时更新。根据用户编号或用户名可查询特定用户的历史运行数据,对特定用户可进行实时数据采集,并保存其数据到数据库。监控中心接收端的软件还可以添加新用户,包括用户编号、名称、塔机型号、生产厂家等信息。根据其中的一项或几项信息可以查询其所有信息,通过监控中心发送指令可控制任意塔机,塔机接收到指令后,会自动联网发送当前的工作状态信息,即可在查询系统的地图上实时显示用户塔机的实时工作信息,并可以选择其中的信息存储到服务器中。
5 系统数据精准度实验及分析
为了能够较客观地对系统性能进行评定,选择工作环境较复杂的某港口机械厂在用QTZ63型塔机作为实验对象,该塔机的最大幅度为50m,最大载重为6t。
为了对起重量精度进行评估,我们在 0.3t、1t、2t、4t、5t、6t这 6 组不同吊重下展开现场实验。由于塔机在突然启动或突然制动时会产生动载冲击,可能会使系统检测值产生较大波动,因此对每种吊重均按照快档起升、慢档起升、停钩保持、慢档下落、快档下落的先后顺序进行操作,每组反复5次以观察动载对实验数据的影响。
为了对幅度精度进行评估,把起重臂的标准节视为测量位置,将小车分别停在各测量点上,将实测值与真实值进行比较。对于高度精度的评估,以塔机的标准节为测量标准,将吊钩停在各测量位置处,比对实测值和真实值。对于角度精度的评估,以30°为一个测量位置,将塔身停在相应的角度,比对实测值和真实值。
测试结果如表1所示。从表中可以看出:
(1)整个系统的起重量精度控制在±60kg以内,幅度精度控制±20cm以内,高度精度控制在±20cm以内,回转角度控制在±5°以内,可完全满足用户要求。
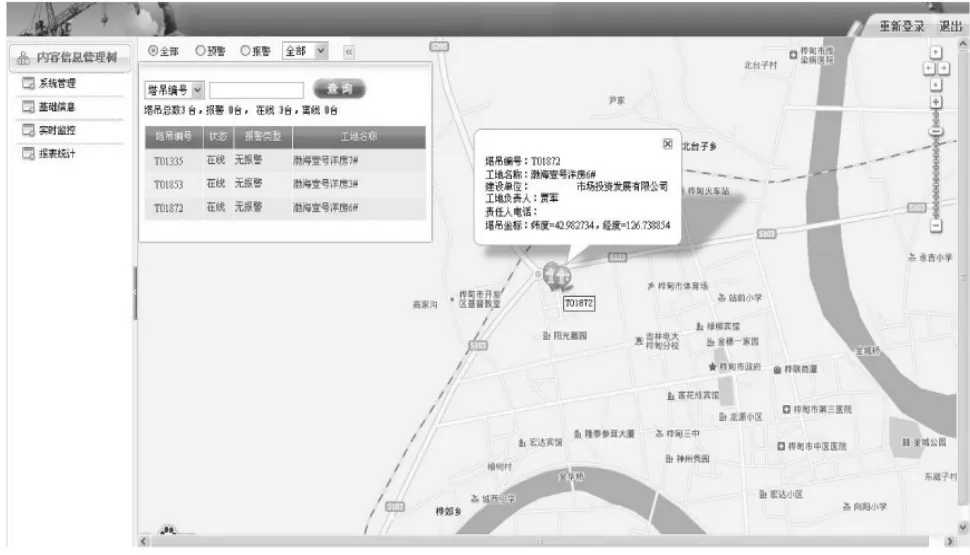
图7 监控中心的软件主界面
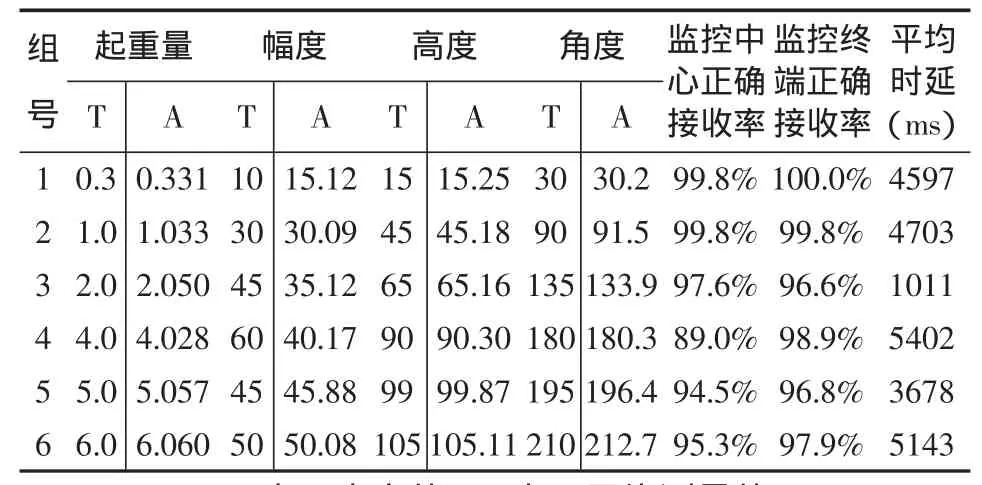
表1 测试结果
(2)监控终端发向监控中心的数据正确率达93%左右。
(3)监控中心发向监控终端的数据正确率达97%左右。
(4)时延主要与通信速率有关,在通信速率小于10kb/s时,平均时延在1s左右,单程时延就在0.5s左右。监控终端和监控中心通信速率大都在10kb/s以下,监控终端的参数传送到监控中心的时间大约在0.5s左右,其通信的实时性比较高。
6 结束语
本文介绍了塔机的结构及其常用安全防护装置的缺点,提出了一种安全监控系统,讨论了该系统的主要功能和特点,完成了系统无线数据通讯的实验。通过实验论证,系统具有较高的精度和可靠性,完全适合于塔机的安全监控管理。经过工程现场应用和无线通讯实验论证,该系统具有较高的精度、实时性和可靠性,它不仅可以实时显示塔机的工作状态,还具有预警、超限制动保护等功能,同时还能远程监控并记录塔机工作的全过程,用户可以随时登陆并查询历史数据和实时数据,为塔机日常维护和事故判定提供有力的数据支持。
[1]范俊祥.塔式起重机[M].北京:中国建材工业出版社,2004.
[2]付强松.基于无线移动网络的远程数据采集系统的设计[J].信息与电子工程,2007,(10):56-57.
猜你喜欢
水力发电(2022年11期)2022-12-08 06:18:08
农业装备与车辆工程(2021年10期)2021-11-03 08:38:12
科学与财富(2021年33期)2021-05-10 14:54:29
中国特种设备安全(2019年11期)2020-01-16 08:05:56
北京航空航天大学学报(2019年8期)2019-09-10 00:51:40
测控技术(2018年5期)2018-12-09 09:04:14
北京航空航天大学学报(2017年4期)2017-11-23 05:48:54
河南工学院学报(2017年1期)2017-06-07 09:00:59
陕西师范大学学报(自然科学版)(2015年4期)2015-10-29 09:34:10
专用汽车(2015年1期)2015-03-01 04:05:29