
1000 L/min 2D伺服阀实验研究
2015-04-16 11:06祖华
液压与气动 2015年10期
, , , , 祖华
(浙江工业大学 特种装备制造与先进加工技术教育部重点实验室, 浙江 杭州 310014)
引言
随着现代工业的不断发展,大型、重载、高精度的机械设备得到了越来越广泛的应用,液压技术作为高性能机械的关键技术也得到了高速的发展[1]。液压伺服阀作为液压技术的一个重要分支,很大程度上决定整个液压系统的性能。目前大流量的伺服阀存在难以实现高频响的问题,本研究采用了2D阀的解决方案,2D阀相对其他伺服阀具有结构简单、抗污染能力强、构成导控阀导控级的零位泄漏小、固有频率高、动态性能好等优点。为使大流量高频响2D数字伺服阀达到设计要求,对 2D 数字伺服阀采用步进电机的位置和电流闭环控制能实现对阀芯运动的精确控制, 并且有很好的响应速度[2]。理论分析与实验结果表明,该阀具有理想的频率特性。
1 大流量2D伺服阀工作原理
2D阀的工作原理图如图1所示,进油口为p,回油口为T。阀芯内的油路将阀芯上的a孔和b孔连通,即压力油可以通过阀芯上的a孔经由b孔流入右腔[3]。此时右腔的压力等于系统压力p。将右腔的面积设计为敏感腔面积的一半。在阀芯的最左端台肩上开有高压孔和低压孔。高压孔通过阀芯的内部油路与孔相同,低压孔通过油路与T相通。敏感腔的压力由高低压孔和螺旋槽相交的微小弓形面积串联的液压阻力半桥控制[4]。在静态时若不考虑摩擦力及阀口液动力的影响,敏感腔压力为入口压力系统压力p的一半,阀芯轴向保持静压平衡,与螺旋槽相交的高低压侧的弓形面积相等。当以逆时针(面对阀芯伸出杆)的方向转动阀芯,则高压侧的相交面积增大、低压侧的相交面积减小,敏感腔压力升高,并推动阀芯向右移动,同时低压孔又回到螺旋槽的两侧,处于高低压侧相交面积相等的位置,敏感腔的压力恢复为入口压力p的一半,保持轴向力平衡; 若顺时针的方向转动阀芯,变化则正好相反,阀芯向左移动。这就实现了2D伺服阀阀芯转角与轴向位移 (主阀开口)转换的导控结构也称为液压伺服螺旋机构。
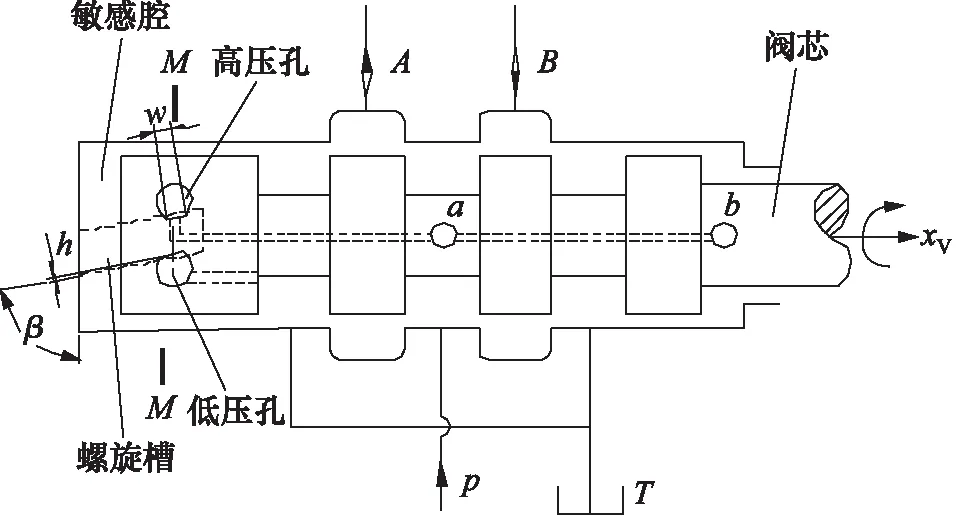
图1 2D阀工作原理图
2 动态特性分析
2.1 混合步进电机的数学模型
两相混合式步进电机作为信号转换元件,其本身就是一个系统。它可以通过电压平衡方程和转矩方程来描述。
电压平衡方程:
(1)

转矩方程:
T=Tmsin[Zi(θm-θ)]
(2)
式中,T为步进电机的输出转矩;Tm为步进电机的静转矩;Zi为转子齿数;θm为旋转磁场转角;θ为转子转角。
2.2 大流量2D伺服阀的数学模型
流入敏感腔的流量一部分是由高压孔经螺旋槽流入的流量,另一部分是高压孔的泄漏量。流出敏感腔的流量一部分为经螺旋槽由低压孔流出的流量,另一部分为低压孔的泄漏量。在不考虑泄漏的前提下流入敏感腔的流量方程为:
(3)
式中:θ—— 阀芯的旋转角度
ρ—— 液压油的密度
敏感腔流入低压孔的流量方程:
(4)
阀芯的运动方程为:
(5)
式中:A—— 左侧容腔的阀芯面积
pc—— 左侧容腔的压力
ps—— 系统压力
mv—— 折算到阀芯上的总质量
xv—— 阀芯的轴向位移
B—— 折算到阀芯上的总粘性系数
Kf—— 液压弹簧刚度
FV—— 作用到阀芯上的负载
3 频率特性试验研究
为了研究大流量2D伺服阀的静态和动态特性,搭建试验平台如图2a、图2b所示,试验系统包括液压系统、数字阀控制器、无接触式磁感应位移传感器、激光位移传感器、示波器信号发生器。信号发生器输出的波形信号与步进电机转子位置信号经数字阀控制器驱动步进电机输出小幅度的角位移,从而驱动阀芯旋转,再通过伺服螺旋结构转化为阀芯的轴向位移阀芯的轴向位移[5]。由激光位移传感器测得显示在示波器上。这样可以得到在不同幅值和频率的波形信号作用下的阀芯位移响应曲线。

图2 试验系统图
采用颤振补偿技术,在叠加信号幅值为间隙量的50%下,大流量2D伺服阀的静态特性如图3所示。从图中可以看出,重复性很好,曲线基本重叠在一起,滞环宽度最大为1.7%。

图3 50%间隙量静态特性
在25%阀开口幅值条件下,测得2D伺服阀在不同频率正弦信号作用下的频率响应如图4~图6所示(图中虚线为控制信号,实线为阀芯位移)。从图可以看出,2D伺服阀在低频段具有良好的跟踪特性,表明其具有良好的静态特性。根据不同频率正弦信号下频率响应可以得到2D伺服阀的频率特性,如图7~图8所示。从图可以看出,该2D阀在75 Hz时,相位滞后约90°,阀-3 dB对应的频宽约为50 Hz。

图4 1 Hz阀芯位移动态响应

图5 50 Hz阀芯位移动态响应

图6 70 Hz阀芯位移动态响应

图7 幅频特性
阶跃响应曲线是在阀满开口幅值的阶跃信号作用下测得的,如图9所示,从图中可以看出,阶跃响应的上升时间约为20 ms,最大百分比超调量为7.9%,稳态误差基本为0。
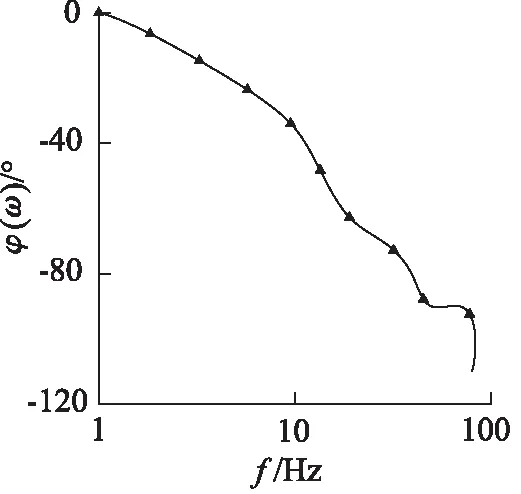
图8 相频特性

图9 阶跃响应
4 结论
设计专门的嵌入式控制器实现对电机的位置闭环
和电流闭环。在任意输入信号的作用下,电机能精确定位,实现转子的输出角位移保持对输入信号的实时跟踪控制。试验结果表明,2D伺服阀具有良好的动态特性。但随着频率增大,幅值衰减明显,相位滞后也逐渐增大。在25%阀开口幅值条件下,对应-3 dB的频宽为50 Hz,阶跃响应时间为20 ms。
参考文献:
[1]骆涵秀,李世伦,陈大军,等.机电控制[M].杭州:浙江大学出版社,2003.
[2]阮健.电液(气)直接数字控制技术[M].杭州:浙江大学出版社,2000.
[3]Ruan J, Burton R, Ukrainetz P. An Investigation Into the Characteristic of a Two Dimensional “2D”Flow Control Valve[J]. Journal of Dynamic Systems Measurementand Control, 2002,24(1):214-220.
[4]阮健,李胜,孟彬.2D数字伺服阀[J]. 液压与气动,2010,(9):77-81.
[5]Li S, Ruan J, Burton R, Ukrainetz P. Application of Stage Control in Material Testing Machine(MTS)[C]. Proceeding of 2ndChinese International Conference on Instrumention, Jinan, China,526-529.
猜你喜欢
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
水泵技术(2021年5期)2021-12-31
化工自动化及仪表(2021年6期)2021-11-26
制造技术与机床(2018年12期)2018-12-23
天津教育·下(2018年9期)2018-07-13
北京航空航天大学学报(2017年4期)2017-11-23
自动化仪表(2017年8期)2017-08-30
电子制作(2017年7期)2017-06-05
