基于表面倾角变化的滑坡临灾预警方法研究
2015-04-16 05:00王妙茜谢谟文
科技视界 2015年2期
王妙茜 谢谟文 胡 嫚
(北京科技大学土木与环境工程学院,中国 北京 100083)
0 引言
滑坡的变形破坏是一个长期过程,按其破坏速度,可分为蠕滑型滑坡和突发型滑坡[1],如金坪子滑坡属于蠕滑型滑坡,即滑坡持续缓慢滑动长达数十年之久。滑坡的发生发展都是从内部变形破坏开始的,随着内部变形的发展,导致下滑力逐渐大于抗滑力,边坡便会失稳,局部或整体垮塌,以达到新的平衡。
滑坡的灾害识别、监测预报是我国经济社会的重要课题。国内外学者在滑坡安全监测领域做了大量的研究,滑坡的预测预报常用的有斋藤迪孝模型[2]、灰色系统模型[3]、神经网络方法[4]等。对滑坡灾害进行有效的监测预警是减轻其危害的主要手段,监测过程即是通过捕捉滑坡体动态变化信息,建立其与滑坡成灾演化阶段的对应关系,通过专业分析预测地质灾害
滑坡监测一般采用位移监测技术,有GPS监测[6-9],经纬仪监测[10],钻孔倾斜仪监测[11-13]、遥感信息技术[14-16]等监测手段,这些监测手段大都成本高昂,对监测环境和安装条件要求严格,且需要专业的分析判断。
本文提出捕捉滑坡突变信息的简易方法,大幅降低预警监测成本。受滑坡征兆识别现象醉汉林的启发,在待测边坡布设监测杆体,如果发生滑坡土体位移突变,杆体会发生一定角度的倾斜,这间接实现了滑坡的位移监测,捕捉滑坡临灾突变信息。
1 滑坡临灾预警方法研究
假定一边坡体如图1所示,将滑体自右向左划分为等距土条,分别编号为:1,2,3,4,5…i…n…,土条等间距为 bi,右边长度为 li,当岩体向左移动一个土条距离,即bi长度,计算各土条单元地表位移。
将土坡分为两个部分,即坡顶和斜披,记土坡向左移动bi长度时,坡顶地表位移为S1,而斜坡的位移为S2,在坡顶位移角度计算如式(1),位移值计算如式(2),斜坡的位移角和位移值计算如式(3)和式(4)所示。相应地可以通过滑坡体上倾角传感器的变化测定滑坡的位移状况,进而预警滑坡位移的突变,达到临灾预警目的。
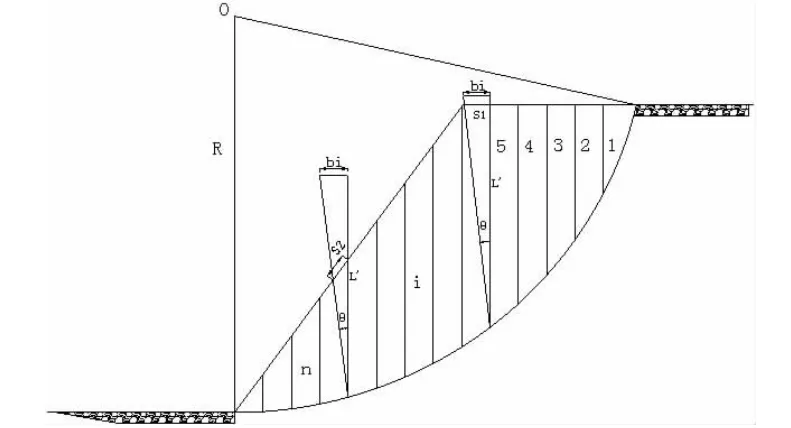
图1 条分法计算简图


本文选取一个实例:大光包—红洞子沟滑坡进行滑坡模拟数值分析。大光包—红洞子沟滑坡是汶川大地震引发的大规模滑坡,其体积达7.5×108立方米,堰塞坝高690m。数值模拟了滑坡的全过程,采用的主要参数如下:ρ=2.5(g/cm3),E=1.86GPa,摩擦角 φ=10.8(°),粘聚力c=1.276(MPa)。在土体上标记M点,滑坡破坏结束,土体趋于稳定后,M点位置在滑坡前后的位置对比如图2所示。在滑坡破坏过程中 ,M点的速度—时间以及位移—时间关系曲线如图3所示。

图2 滑坡前后M点位置对比
若将滑坡预警传感器插于山体之上,诸如M点位置,实时监测其位移、速度、加速度及振动情况,做到及时发现滑坡征兆,为科研和工程监测提供数据。下面对大光包滑坡监测点M进行分析,其速度位移随时间变化曲线如图3所示。
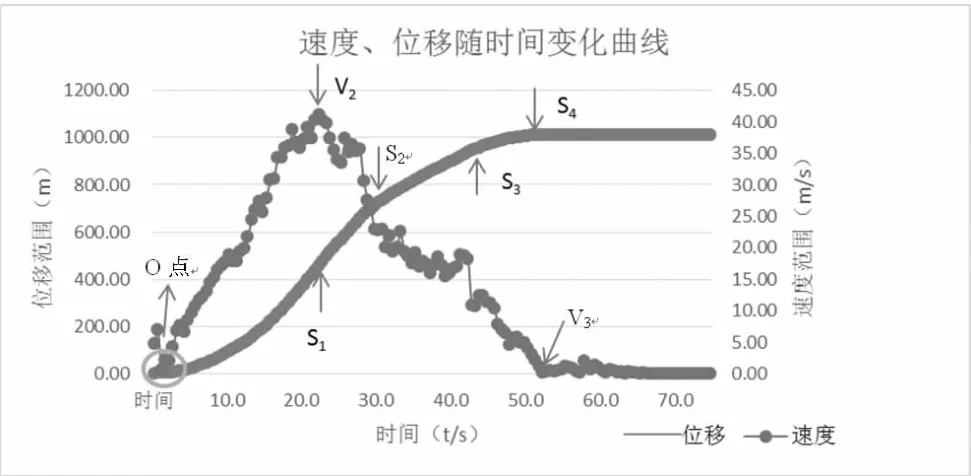
图3 M点的速度—时间曲线和位移—时间曲线V2
分析M点在整个滑坡过程中,随时间推移的速度和位移变化曲线。分析曲线可以看出,在滑坡初始阶段,位移和速度都有不同程度的变化,其中速度比位移对于土体的变化更加敏感,此时时间是在t=1.5s时O点的速度v=0.71m/s,位移S=5.43m。随后,土体失稳进入加速下滑阶段,即O S1段,此阶段加速度为正值,故速度逐渐加大到峰值 v2点(t=22.5s,v=41.7,S=456.92m)。 从 S1点开始,滑体进入减速下滑阶段,直到 S4点(t=51.5s,S=1010.83m),滑体达到新的平衡,位移稳定,位移的变化率为零,此时速度v3=2.29m/s。
监测点M的垂直监测桩角度分析如图4所示。作对比线L1,L2可以看出,在滑坡的始滑阶段,当位移还不十分明显的时候,此时监测桩已有很大的倾角。如对比线L1划在时间t=0.5s时,此时的角度值θ=32.90°,S=4.77m,可见在滑坡开始的瞬间,监测桩倾倒,根据现在的技术手段,可识别角度改变的最小误差是0.01°,因此在角度超过安全范围,报警器可立即感知,实现报警。再将对比线L2划在时间t=8.5s,此时的角度θ=89.07°,S=16.75m,由图4可以看出,在对比线L2以后的时间段内,角度值是趋于稳定的,而位移值还有一个很大的变化幅度,在监测预报工作中,我们希望早发现早采取措施,因此基于土体的表面倾角变化的滑坡临灾预警方法简单实用。

图4 M点倾角及位移随时间的变化曲线
为了能更清楚分析在滑坡初始阶段土体的倾角变化,我们选取前20s的数据进行分析,如图5所示。角度监测对土体的变化十分敏感,角度由初始阶段的 θ=32.90°变化到 J 点(t=1.0s,θ=76.59°),突变明显,易于侦测。到拐点K(t=2.0s,θ=79.75°),若在滑坡开始之初就发出预警信号,为监测预防工作争取宝贵时间。最后土体达到新的平衡,角度稳定,如 L 点(t=6.0s,θ=88.39°)以后基本稳定在 θ=89°,在 KL 阶段,时间跨度仅为4s,角度增加幅度为10°,远远超过位移或速度的变化率,具有监测预报的现实意义。
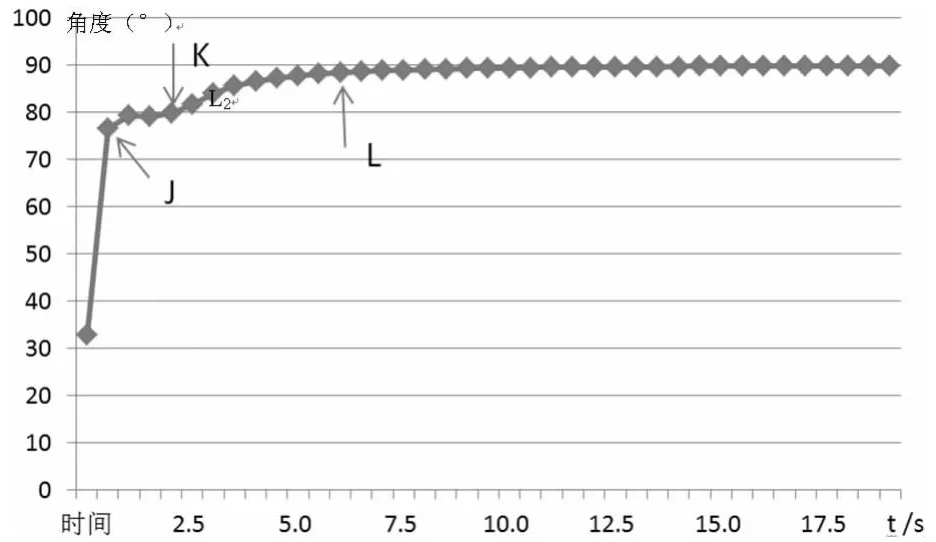
图5 M点角度随时间的变化曲线(前20s)
因此,基于倾角突变的滑坡预警方法比位移或者速度监测更加敏感,易于达到监测目的,角度误差小,监测手段成熟,成本低,利于大面积推广。
2 结论
本文通过基于表面倾角棉花的滑坡临灾预警方法研究,比较分析滑坡滑动过程中地表监测点的位移,速度及倾角变化,得到如下结论
(1)通过地表监测点位移变化与速度变化的关系可知,监测点速度在滑坡滑动开始有一个突变点O点,此时滑坡还基本没有产生位移,难以作为滑坡预警指标,同时滑坡本身可能还有一个较长的滑动位移时间段。另一个速度突变点V2点发生在滑坡产生较大加速位移之后,此时的预警时机较晚,不利于及时避险。
(2)结合监测点位移与倾角变化的关系曲线可知,监测点角度在位移拐点S1之前早已产生幅度较大的倾角突变并趋于稳定,可以很好地用于滑坡灾害的避灾预警。
总之,采用基于倾角突变的滑坡预警方法可以达到滑坡临灾预警的目的。其系统简单实用,成本大幅度降低,利于大面积推广。
[1]刘广润,晏鄂川,练操.论滑坡分类[J].工程地质学报,2002,10(4):340-342.
[2]SAITO M.Forecasting the time of occurrence of a slope failure[C]//Proceedings of the 6th International Conference on Soil Mechanics and Foundation Engineering.Montreal,Canada:[s.n.],1965:537-541.
[3]陈明东,王兰生.边坡变形破坏的灰色预报方法[C]//全国第三次工程地质大会论文选集(下卷).[S.l.]:[s.n.],1988:1226-1232.
[4]MAYORAZ T,CORNU T,VULLIET L.Using neural networks to predict slope movements [C]//Proceedings of 7th International Conference on Landslides.Rotterdam:Balkema,1996:295-300.
[5]徐绍铨,程温鸣,黄学斌,李征航.GPS用于三峡库区滑坡监测的研究[J].水利学报,2003(1):114-118.
[6]裴世建,王祖军.GPS 在滑坡监测中的应用[J].工程勘察,2007,10:55-57.
[7]张文君.滑坡灾害遥感动态特征监测及其预测分析研究[D].李永树,成都:西南交通大学,2007,1.
[8]易庆林,卢书强,何祥.测量机器人在滑坡应急监测中的应用[J].工程勘察,2007,10:55-57.
[9]陈开圣,彭小平.测斜仪在滑坡变形监测中的应用[J].岩土工程技术,2006,20(1):39-41.
[10]金枭豪,王刚,郭宁,陆可喜.钻孔倾斜仪监测在塘角村1#滑坡预警监测中的作用[J].中国地质灾害与防治学报,2009,20(1):103-107.
[11]李刚,王刚,高幼龙,薛星桥.固定式钻孔测斜仪在滑坡示范监测中的应用[J].水文地质工程地质,2009(4):135-137.
[12]张文君.滑坡灾害遥感动态特征监测及其预测分析研究[D].成都:西南交通大学,2007,1.
[13]石菊松,吴树仁,石玲.遥感在滑坡灾害研究中的应用进展[J].地质评论,2008,54(8):505-513.
[14]王治华.滑坡、泥石流遥感回顾与新技术展望[J].国土资源遥感,1993(3):10-15.
[15]徐卫亚,齐志诚.水布娅大岩淌滑坡及马岩湾滑坡极限平衡分析[J].勘察科学技术,1996(1):3-7.
[16]沈振中,崔娟,任华春.土石坝抗震稳定性分析的极限平衡水平条分法[J].南水北调与水利科技,2011,9(54):145-148.
[17]沈可,张仲卿.三维抗滑稳定分析中点的安全系数法[J].人民珠江,2003(2):21-22.
[18]张占荣,朱泽奇,杨艳霜,等.基于不同应力路径的点的安全系数研究[J].隧道建设,2009,29(6):626-627.
[19]蒋青青.基于Hoek—Brown准则点安全系数的边坡稳定性分析[J].中南大学学报:自然科学版,2009,40(3):786-789.
猜你喜欢
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
河北地质(2021年1期)2021-07-21
北京汽车(2021年3期)2021-07-17
水电站设计(2020年4期)2020-07-16
北方交通(2016年12期)2017-01-15
湖南畜牧兽医(2016年3期)2016-06-05
水利科技与经济(2016年6期)2016-04-22