
基于弦长位置矩阵的目标识别
2015-04-14 12:28:00杨明强
计算机工程与应用 2015年1期
柴 华,杨明强
1.国家知识产权局专利局 专利审查协作北京中心,北京 100190
2.山东大学 信息科学与工程学院,济南 250100
1 引言
在许多实际应用中,图像并不是从相同的视点获取的,经常发生视点的改变。视点的改变使得图像往往经历仿射变换甚至投射变换等相对较为复杂的几何畸变,仿射变换相对于平移、旋转、尺度变化等是对图像几何畸变的更为准确的逼近。因此,图像分析和计算机视觉中对仿射不变性的研究越来越引起了国内外工程界的重视,仿射变换的不变性特征提取和识别研究具有更加重要的意义。现在,对于仿射不变特征的提取主要是提取用于识别目标的局部特征或者全局特征。在图像处理中,仿射几何的研究对象是图像中的点、线、面。在仿射变换下,图像中的点和线之间的关系存在着很多不变性,例如,平行不变、单比不变等等。仿射目标形状识别就是利用从图像中提取到的仿射不变特征,实现对目标形状的检测、定位与分类[1-2]。
常用的仿射不变目标识别的方法大体上可以分为以下几类:
(1)用傅里叶描述子来表示轮廓形状[3]。傅里叶描述子的优点在于目标图像在有部分被遮挡的情况下,依然可以对目标图像进行有效分类。傅里叶描述子很容易进行归一化处理,以获得具有旋转、平移以及尺度不变的特征向量。轮廓上采样点的数目,采样点的间隔,量化误差以及轮廓的扰动等等因素都会对基于傅里叶描述子的方法产生影响。
(2)用矩不变量来表示轮廓边缘[4-5]。这种方法采用目标轮廓边缘的矩不变量特征来实现目标的分类识别。其优点在于矩不变量不受目标模型和检测图像之间旋转,平移以及尺度缩放的影响,同时计算量较小,速度较快。与傅里叶描述子的方法类似,矩不变量的方法也需要大量的数据库进行训练以获得良好的识别结果。
(3)用几何不变量表示仿射不变特征量。几何不变量是目标图像的内在信息,具有不随着视点改变而发生改变的性质,因此近年来在计算机视觉领域越来越受到研究人员的重视。在目标识别中,用于简单的二维目标形状的识别的主要有几何不变量包括代数不变量[6]、微分不变量[7-8]。
目标的形状仿射相似不变特征提取可以根据图像信息利用的程度分为基于全局不变特征的方法和基于局部不变特征的方法[9]。基于局部不变特征的方法和基于全局不变特征的方法具有各自的特点和适用领域。前者利用的是目标形状的整体信息,通常计算量较大,但对于噪声畸变相对敏感;后者仅是利用了目标形状的局部信息,通常来说计算量较小,可用于实时性要求较高的应用场合,但是抗噪声的能力相对较强[10-11]。目前,在仿射不变性特征提取方法的模型建立和适用性方面,建立起一种适用范围广、鲁棒性强同时又能有效区分不同目标类别的方法还存在着相当大的困难[12-13]。
本文提出了一种基于目标形状各个方向上的不同弦长的分布信息的弦长位置矩阵算法,用该算法提取的目标形状特征具有仿射不变性。
2 弦长关联统计算法
形状特征是描述图像内容的另一个重要特征,也是计算机视觉和模式识别研究的一个基本问题。形状是物体的基本特征之一,用形状特征区别物体非常直观,利用形状特征检索图像可以提高检索的准确性和效率。形状特征通常和目标联系在一起,因而含有一定的语义信息,是图像中最显著的核心特征,可以有效地对图像中感兴趣的目标进行检索。
弦长关联算法的基本原理是利用统计学算法,根据形状弦长的相关特性,统计形状的各个方向的弦长,并用直方图表示出来。各个方向的弦长统计直方图形成弦长的相关矩阵,用该矩阵表示形状特征[14]。该算法具有平移、旋转和尺度变化不变性,并且对于轻微遮挡和噪声干扰具有卓越的抵抗能力。弦长关联统计算法可以处理各种类型的二维图像,甚至是具有空洞或者被分为单独的几个部分的图像。因此,可以应用该算法来从图像中分割出感兴趣的目标。该算法提出的形状描述符与检索方法还表现出具有图像变换的不变性。由于该算法利用了图像的统计特性,因此对单个样本或少数几个样本取值的变化不是特别敏感,这就使得使用该算法提取的弦长特征量对目标图像局部区域内的变化不敏感。因此,对于轻微遮挡的目标图像,该算法也具有良好的识别效果。
但是该算法没有考虑到仿射变换的影响,没有特定的操作来抵抗仿射变换,在理论上缺乏对目标抵抗仿射变换能力的依据,在实验中表现出的抵抗仿射变换能力不够理想,主要原因之一是该算法统计弦长时仅作归一化处理,未考虑到仿射变换对于各个方向平行弦间距的影响,同时没有考虑到弦长分布的位置信息。本文对统计弦长的处理方法加以改进,完善其理论结构,进一步充分挖掘图像目标的固有信息,使其在抗仿射变换方面取得突破,进一步提高该算法的性能。
3 弦长位置矩阵
弦长位置矩阵是利用表示弦长位置信息的三维矩阵来表示目标图像的形状特征,避免利用统计学的方法忽略了弦长位置的问题。首先,可以根据仿射变换前后封闭区域面积之比的特点来确定弦长的位置,将弦长的位置信息作为目标形状识别的一个特征量。在统计各个方向的弦长时,由于目标的形状特点或者内部存在空洞等原因,目标边界上的两点连线被分为若干部分,也就是同一位置上存在若干长度不同的弦,如图1所示。

图1 相同位置不同弦长示意图
在记录弦长时,应将同一位置的这些弦长分别记录下来,然后按照弦的长度进行排序,将排序的信息作为位置信息的补充。因此,可以构造一个包含弦长位置信息的矩阵M[n,k,θ]来表示形状特征,其中,n为弦长的位置信息,k为弦长的排序信息,θ为弦长的角度信息,矩阵的元素为归一化的弦长。
3.1 弦长位置信息的统计
首先,将图像采用阈值分割法进行二值化处理。将获得的二值化图像旋转θi角度。假设θi方向上的弦长集合由 C={ci,n/n∈[1,N]}表示,其中N是各个方向上弦的数量。
弦长的位置根据仿射变换前后封闭区域面积之比不发生改变的特点来确定。当从固定的方向进行弦长统计时,弦长的位置可用一系列参数标号来表示。根据弦长统计的特点,此处采用统计弦长和的方法来计算区域面积。弦长利用弦与形状边界的交点之间的欧式距离进行计算。
为了避免统计过程中的累积误差,利用第n条弦与图像起始边界组成的封闭区域面积来统计第n条弦ci,n的位置,按照下面的公式计算


3.2 弦长位置的仿射不变性
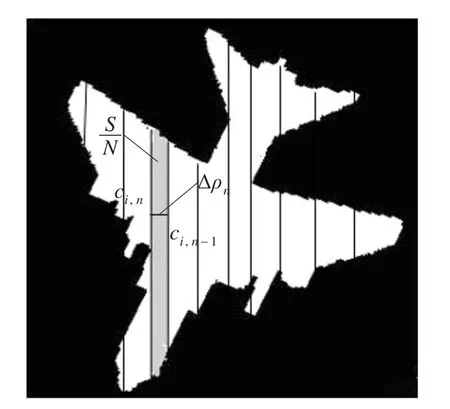
图2 旋转θi角度后目标形状平行弦位置
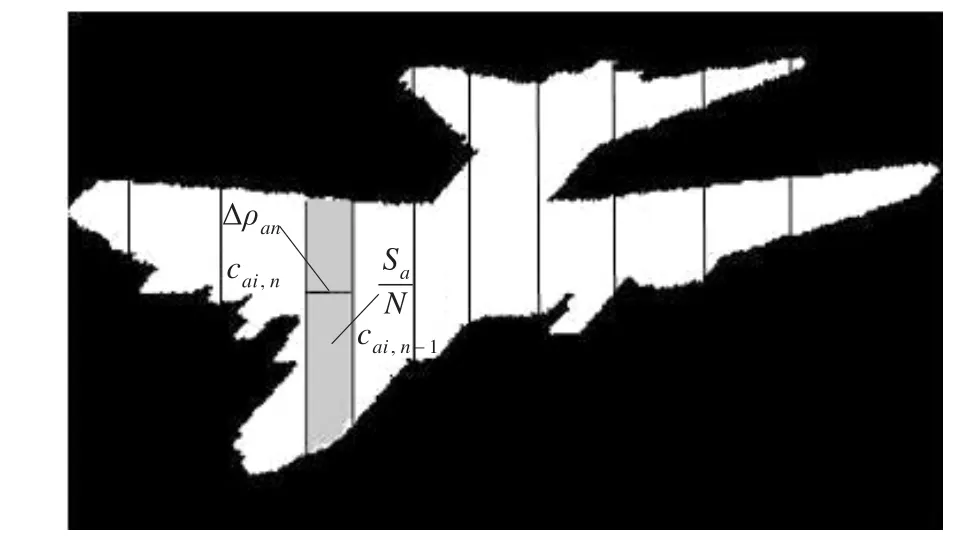
图3 经过仿射变换旋转θai角度后目标形状平行弦位置
由图2和图3可以看出,两条相邻平行弦间的面积与整体面积之比不发生改变,因此,弦长的相对位置,即弦长的位置标记n,在仿射变换之后不发生改变。
3.3 弦长位置矩阵的构造
确定弦ci,n的位置之后,统计在该位置上所有弦长的信息。假设弦ci,n与形状边界依次交于点p1(x1,y1),p2(x2,y2),…,pm(xm,ym),m=2k。位于弦ci,n的位置上的第j条弦的长度利用该弦与形状边界的交点p2j与p2j-1之间的欧氏距离表示,即

令向量 D为在弦ci,n位置上所有弦长的集合D={L1,L2,…,Lk},将 D内的元素按照弦长进行降序排列,得到排序后的集合 D′={L′1,L′2,…,L′k}。如果将角度θ的范围[0,179]均匀量化为F个区间,当弦长位置序号n从1增加到N,角度θ从增加0到θF,可以获得N×F个弦长集合,将这些弦长集合进行排列,组成弦长位置矩阵M。
按照上述方法,统计各个方向的弦长以及位置信息的特征,形成弦长位置特征矩阵M[n,k,θ]。为了进一步增强提取的形状特征矩阵对于仿射变换的抵抗能力,对弦长特征矩阵 M[n,k,θ]中的弦长采用相对弦长进行归一化处理。此处的相对弦长是绝对弦长与矩阵中的最大弦长的比值,即

其中,Lmax,i为θi方向上的最大弦长。
4 相似性测度
本文的相似性测度采用动态空间弯折匹配算法(DSW)[15],动态空间弯折匹配算法是基于动态时间弯折距离(DTW)的非线性技术的算法。
当提取的形状特征序列Q和G不具有相同的维数,同时具有弯折的情况时,通常采用动态时间弯折距离来度量特征之间的相似性。动态时间弯折距离基于两个特征序列中的各点间的非刚性排列,它允许特征序列中的点进行复制后再进行对齐匹配。
定义n行m列矩阵T为时间序列Q和G的距离矩阵,矩阵T中的元素为不同时间序列数据对象之间的点的欧氏距离:

其中,d(qi,gi)是两个时间序列数据点之间的距离值,可以认为是对象q与g之间相异性的量化表示。
为了矩阵处理方便,应该把弯曲路径的摆动范围限制在距离矩阵的对角线两侧附近,因此,在不考虑区域外的距离相似因子的情况下称这种弯曲路径的子集为弯曲窗口。通过预先设定的宽度为w的对角弯曲窗口进行查找的动态时间弯曲距离dDTW(Q,G)由下列公式定义:

动态空间弯折距离按照下列公式进行定义[9]:

其中,LQG是最小弯曲路径在距离矩阵T中经过的元素的个数。
在进行相似性比较时,首先计算查询图像与模板图像的弦长位置矩阵 MT[n,k,θ]与 MQ[n,k,θ]中每个方向上位于相同位置的最大弦长之间的距离,即计算二维矩阵 MT[n,1,θ]与 MQ[n,1,θ]之间的距离d1:

在一般情况下,利用d1可以识别出大部分目标图像。此处,还可以根据不同的计算精度要求来选择需要计算的二维矩阵 M[n,i,θ]之间的距离di:

将计算得到的距离d1d2…di进行加权求和,得到最终的判决距离DistM:
5 实验结果
在军事科技的应用中,从获取的目标图像中能够快速地区分出不同的飞行器类型以及飞行器的不同飞行姿态具有十分重要的意义。实验采用实际的飞行器图像来验证本文提出的算法的形状描述能力,利用弦长位置矩阵提取的仿射不变特征进行飞行器图像识别。在本文实验中采用在文献[16]中采用的相同的飞行器数据库,模板图像的轮廓经过任意的仿射变换产生测试图像。模板图像和测试图像如图4所示。

图4 模板图像和相应的测试图像

表1 最接近的4幅模板图像的动态空间弯折距离
表1给出了与每幅测试图像最接近的4幅模板图像的动态空间弯折距离。其中,按照公式(8)定义的测试图像与模板图像之间的动态空间弯折距离列在表的4列中。第1列为与对应的测试图像最为匹配的模板图像的动态空间弯折距离。两幅图像的动态空间弯折距离越小,则说明两幅图像的相似程度越高,多幅图像中与其动态空间弯折距离最小的图像为与其最为相似的图像,表1中动态空间弯折距离数值后括号内的标号为与该距离数值对应的模板图像的标号,由实验结果可以看出,与测试图像相比动态空间弯折距离最小的模板图像是与其对应的进行仿射变换之前的模板图像,由此可见,测试图像可以被正确地识别,识别率可以达到100%。而弦长关联统计算法则没有考虑到弦长位置的变化,对于仿射变换无法抵抗,对仿射变换之后的测试图像无法正确识别出相应的模板图像,识别率为0。实验结果表明弦长位置矩阵是一种有效的形状描述方法,对于仿射变换具有良好的鲁棒性。
6 结束语
提出了一种基于弦长位置矩阵的形状特征提取算法,通过统计目标形状各个方向上的弦长位置信息和不同弦长的排序信息来构造仿射不变特征量,利用弦长位置矩阵来表示目标形状的特征。本文算法易于实现,在识别性能上是优越的。实验结果表明该算法提取的形状特征具有良好的仿射不变性,与弦长关联统计算法相比较,本文提出的算法在抵抗仿射变换方面具有卓越的表现。
[1]章毓晋.图像工程[M].北京:清华大学出版社,2000.
[2]许录平.数字图像处理[M].北京:科学出版社,2007.
[3]Zhang Shaoting,Zhan Yiqiang,Zhou Yan,et al.Efficient sparse shape composition with its applications in biomedical image analysis:an overview[C]//Proceedings of the 9th IEEE International Symposium on Biomedical Imaging(ISBI),2012:976-979.
[4]Hu M K.Visual pattern recognition by moment invariant[J].IRE Trans on Information Theory,1962,8(2):179-187.
[5]Khotanzad A,Hung Y H.Invariant image recognition by Zemike moments[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1990,12(5):489-497.
[6]Forsyth D A,Mundy J L.Invariant descriptor for 3-D object recognition and pose[J].IEEE Trans on Pattern Anal Mach Intell,1991,13(10):971-991.
[7]Weiss I.Noise-resistant invariant of curves[J].IEEE Trans on Pattern Anal Mach Intell,1993,15(9):943-948.
[8]Weiss I.Geometric invariants and object recognition[J].Int J Comput Vision,1993,10(3):207-231.
[9]陈涛.图像仿射不变特征提取方法研究[D].长沙:国防科学技术大学,2006.
[10]吕玉增.形状仿射不变特征提取与识别研究[D].长沙:国防科学技术大学,2008.
[11]孙即祥.模式识别中的特征提取与计算机视觉不变量[M].长沙:国防工业出版社,2001.
[12]Lazebnik S,Sehmid C,Ponce J.A sparse texture representation using affine-invariantregions[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,2003:319-324.
[13]Rothganger F,Lazebnik S,Schmid C,et al.3D object modeling and recognition using affine invariant patches and multi-view spatial constraints[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition,2003:272-277.
[14]Yang Mingqiang,Kidiyo K,Joseph R.Shape matching and object recognition using Chord contexts[C]//Proceedings of 2008 International Conference on Visualisation,9-11 July,2008:63-69.
[15]Yang Mingqiang.Shape-based feature extraction and similarity matching[D].France:INSA,2008.
[16]Dudani S A.Aircraft identification by moment invariants[J].IEEE Trans on Comput,1997,21:39-46.
猜你喜欢
建材发展导向(2022年23期)2022-12-22 07:30:02
中学生天地(A版)(2022年11期)2022-11-25 07:43:16
建材发展导向(2022年12期)2022-08-19 02:33:10
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:46
数学物理学报(2018年6期)2019-01-28 08:57:54
新世纪智能(英语备考)(2018年11期)2018-12-29 10:56:52
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:36
小学生学习指导(低年级)(2016年10期)2016-12-01 06:10:42
中国房地产业(2016年24期)2016-02-16 06:10:20
中国卫生(2015年9期)2015-11-10 03:11:10
