
基于TMS320C6678的ISAR实时成像方法研究
2015-04-14 03:05袁子乔
火控雷达技术 2015年2期
杨 刚 向 聪 袁子乔 赵 博
(西安电子工程研究所 西安 710100)
0 引言
伴随着宽带雷达技术的发展,逆合成孔径雷达ISAR(Inverse Synthetic Aperture Radar)的在国防和民用领域的应用不断增加。ISAR 具有全天候、全天时的对飞机、舰船等远程目标进行高分辨成像的优点,所以一直是雷达领域的研究热点之一。经过众多科研工作者这些年来的努力,ISAR 技术的逐渐发展成熟。但ISAR 成像算法计算量极大,在实时性要求高的场合,ISAR 的实现是一项繁重的任务。距离-多普勒(R-D)方法是一种研究比较成熟且应用广泛的ISAR 成像方法,这种方法是基于转台模型的,该模型假设雷达与目标之间不存在平动分量,也就是进行了非常理想的运动补偿[1],这种方法相对简单,便于工程实现,本文将采用R-D 方法进行成像。
TMS320C6678(后文中简称C6678)是TI公司于2010年推出的一款具有业界领先处理能力的多核DSP 处理器,其采用的是KeyStone 多内核架构,片内集成了8 个C66x 核,每个核都具有定点和浮点运算能力,同时也集成了SRIO(Serial RapidIO),PCIe(Peripheral Component Interconnect Express)等接口,为方便数据的搬移,配置了EDMA(Enhanced Direct Memory Access)。TI公司也为开发人员提供了C6678 的MathLib,DSPlib 等函数库。
本文在分析了ISAR 成像流程的基础上,对成像流程进行了合理的划分,在C6678 上进行了并行处理。最后通过仿真数据,验证了并行处理的高效性和成像结果的正确性。
1 步进频ISAR 成像原理
ISAR 成像的目的是从回波数据中求出目标散射点的幅度及其在二维平面上的分布。ISAR 成像的方式是,雷达不动,目标相对于雷达运动。步进频ISAR 成像的第一步是对每个CPI的数据生成一维距离像。目标和雷达的相对运动可以分解为目标相对于雷达的平移运动(平动)、目标相对于雷达的旋转运动(转动)和目标自身的旋转运动。平动分量会破坏回波信号之间的相干性,造成ISAR 成像结果的失真[2],运动补偿的目标就是补偿掉目标相对于雷达的平动部分。

图1 ISAR 成像流程
1.1 一维距离像原理
ISAR 成像的第一步是利用每个CPI内的回波数据得到一维距离像。线性调频步进信号合成高分辨距离像的方法中,首先对子脉冲回波进行脉冲压缩得到粗分辨距离像,然后对一个CPI内的粗分辨距离像进行IFFT 得到高分辨距离像。为降低采样损失,一般参数的选择使得IFFT 处理结果有部分重叠,按照一定的准则,从IFFT 结果中选取一些点,组成完备一维距离像的过程就是目标抽取算法[3]。
目标抽取算法已经非常成熟,应用较多的方法有同距离舍弃法、同距离选大法和同距离累加法,这三种方法是分别对IFFT 结果中重叠部分进行舍弃、选大和累加取平均操作实现的。另外,文献[4]提到了移位抽取法一种降低抽取损失,该方法是通过将抽取窗与目标同步移动实现的。综合考虑,本文中采用了移位抽取法来实现一维距离像。
文献[5]指出当目标速度比较高时,在脉冲持续时间内目标和雷达之间距离不变的假设不再成立,要想得到高分辨一维距离像,需要进行高速运动补偿,假设通过窄带计算的目标速度为v1,第k 个脉冲对应的回波数据为s(k),脉冲重复时间为Tr,则一维距离像的高速运动补偿公式见式(1)。ISAR成像流程如图1所示。

1.2 包络对齐
包络对齐的目的是消除由于目标相对于雷达的平动带来的相邻一维距离像的错位问题。目前应用较多的方法是相邻互相关法[6],该方法假设目标平动造成的相邻一维距离像之间的包络变化较小,有较强的相关性,一般情况下,ISAR 成像可以满足该条件。互相关的计算可以采用复包络,也可以采用实包络,本文中采用实包络,公式为:

根据互相关最大值的位置可以确定相邻距离像偏移的距离单元数(第i个距离像偏移的距离单元数记为ri)。为减少累加误差,本文中是将每个距离像与前面所有距离像移位后的加权值进行互相关运算来求偏移的距离单元数。
由式(2)所得的偏移量为采样间隔的整数倍,为提高包络对齐的精度,一般是先对距离像进行插值操作,然后再做相邻互相关。考虑到距离像的间隔时间相同,成像时间很短,假设在成像期间目标速度不变,那么,求得的偏移距离单元数与距离像编号应为线性关系,通过对所求距离像偏移距离单元进行最小二乘拟合,得到偏移距离单元r和距离像i之间的线性关系:

利用最后一个距离像的偏移单元rN和第一个距离像的偏移单元ri可以求得目标速度v,进而对每个距离像进行包络对齐。
1.3 相位补偿
相位补偿中应用比较广泛的方法是多普勒中心跟踪法[6],其实现方法是,将包络对齐后的距离像中,相邻距离像的各距离单元相位差进行加权平均,所得结果作为相邻距离像的多普勒中心相位差,计算公式为:
2 实时成像方案
本系统中所采用的CPI数为256,脉冲数为16,距离单元数为128,目标抽取时在每个IFFT 结果中抽取4 个点。本系统采用了FPGA+DSP 的处理方式,二者通过RapidIO 接口传输数据。FPGA 对每个CPI内的回波数据做完距离向压缩后,连同通过窄带信号计算出的速度v1一起发给DSP,DSP 继续后续流程,本文主要讨论DSP 处理流程。并行处理模型有两种,主从模式和数据流模式[7],主从模式比较适合此系统的处理流程,本系统中选取核0 作为主核,核1-7 作为从核,八个核进行并行处理。
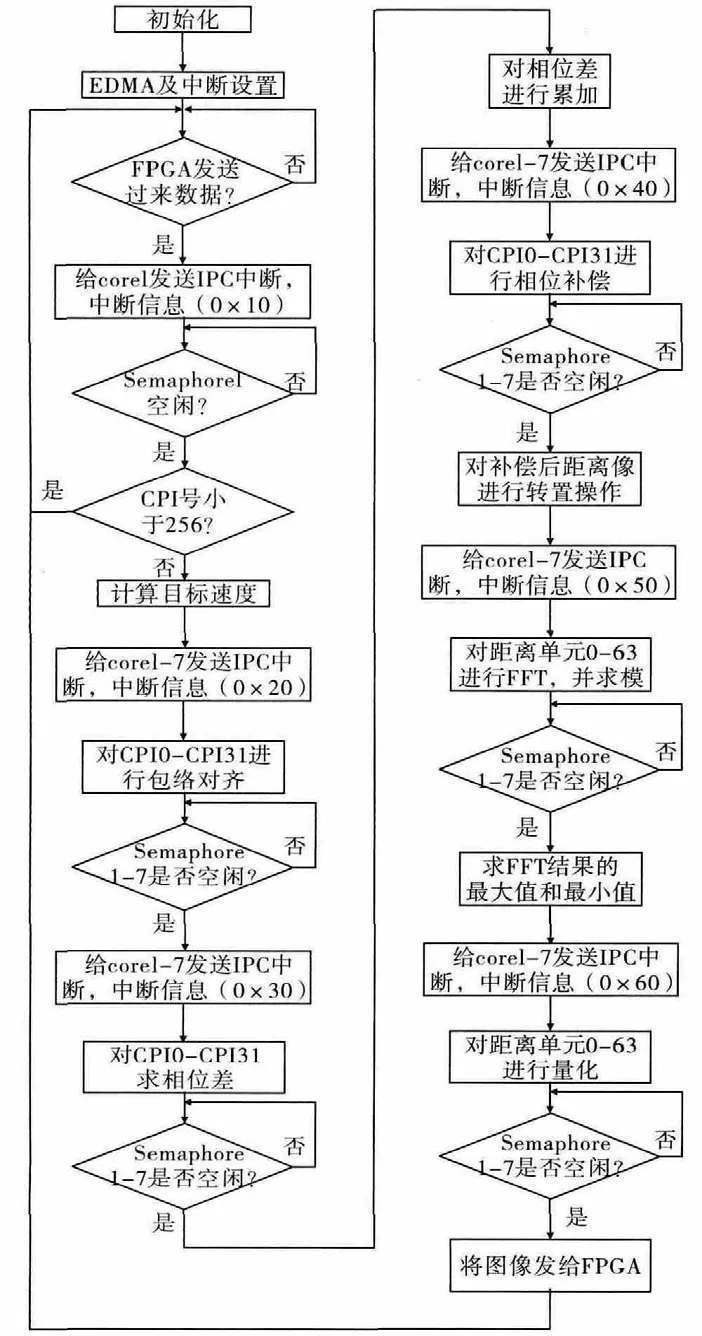
图2 主核流程图
2.1 数据存储
C6678 中每个核都包含512KB 的二级存储器(LL2),八个核共享4MB 的共享存储区(MSM),同时DSP 还支持8GB 的DDR3 存储器。本系统中采用的存储原则是,数据量大的和八个核共享的数据存储在MSM 中,并行运算时每个核独立处理的、数据量小的和临时的数据存储在LL2 中。
在计算时为避免多核对MSM 的访问冲突消耗时间,在计算前把每个核需要的数据通过EDMA 搬进LL2,在计算完成后将计算结果同样通过EDMA搬至MSM。C6678 中拥有3 个CC(Channel Controller),10 个TC(Transfer controller),对应关系为CC0(TC0,TC1),CC1(TC0,TC1,TC2,TC3)和CC2(TC0,TC1,TC2,TC3)。10 个TC 可以被配置起来同时执行数据传输,本系统中为每个核配置了一个固定的TC 用来传输数据,这样在多核同时传输数据时可以提高效率。
2.2 核间同步
主核和从核可以通过IPC 和Semaphore 进行同步的,当需要开始执行一项任务时,主核根据任务类型给从核发送带有不同中断信息的IPC 中断,然后主核开始进行自身的计算。从核X 接收到中断后,首先请求占有Semaphore X,然后根据不同的中断信息执行不同的任务,当任务执行结束后,释放Semaphore X。主核执行完自身计算后,通过检查Semaphore 1-7 的状态来判断从核的计算是否完成,待所有核计算完成一个任务后,主核开始进行下一任务的分发计算。
2.3 任务分配
本系统中任务分配的原则是计算量小的,不利于并行计算的以及时间能够满足要求的任务由一个核进行计算,对于计算量比较大的且可以并行计算的任务,分发给八个核同时进行计算。分发的原则是根据CPI号或者距离单元号进行的,具体来说,如果是根据CPI号进行分发,那么核X 执行CPI(32 ×X)至CPI(32 ×X+31)之间的数据;如果是根据一维距离像中距离单元号进行的,那么核X 执行距离单元(64 × X)至距离单元(64 × X+63)之间的数据。
本系统详细的DPS 实现流程图如图2 和图3所示,其中图2 为主核流程图,图3 为从核流程图(虚线框内的内容只有核1 有,其他从核没有,因为虚线框中流程耗时很少,在一个CPI时间内即可完成,没有必要进行并行处理)。图中DNUM 代表核的编号。
4 仿真结果
C6678 对仿真数据计算的包络对齐前的结果如图4(a)所示,包络对齐后的结果如图4(b)所示,可以看出,包络对齐实现了预期的效果。

图3 从核流程图(虚线框中内容只有核1 有)
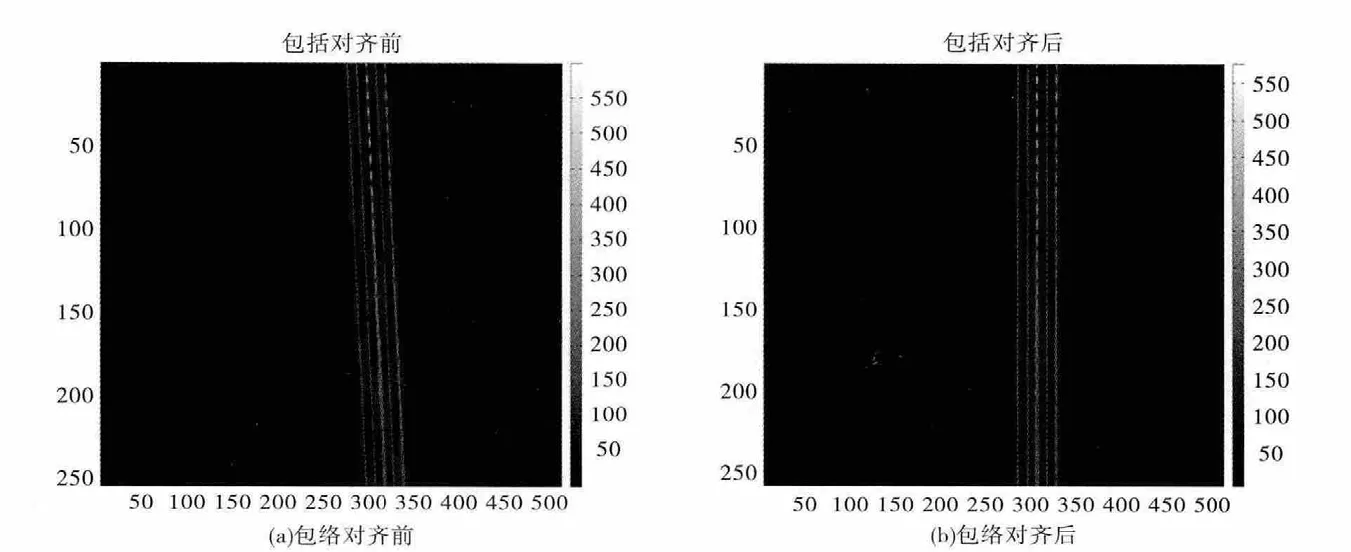
图4 包络对齐效果
C6678 中对仿真数据的成像结果如图5(a)所示,相同的数据由MATLAB 成像的结果如图5(b)所示,二者的差值图像如图5(c)所示。可以看出C6678 的计算结果和MATLAB 计算结果相差极小。
关键子任务的计算时间如表1所示,计算时间包括了核间同步和数据搬移的时间。

图5 仿真数据成像结果

表1 子任务计算时间
5 结束语
本文首先介绍了ISAR 成像算法和C6678 的基本特征。接着介绍了ISAR 成像中任务的划分,核间的同步等,并给出了DSP 详细处理流程图,最后通过对仿真数据的处理说明,本文提出的ISAR 并行处理方案的并行处理效率非常高,能够满足ISAR的实时成像要求。
[1]李俊武.平流层ISAR 系统设计及仿真[D].北京:北京邮电大学,2010.
[2]王瑞君,邱兆坤,黎湘等.基于并行DSP 的实时ISAR 成像系统设计[J].雷达科学与技术,2014,8(4):306-311.
[3]龙腾,李眈,吴琼之.频率步进雷达参数设计与目标抽取算法[J].系统工程与电子技术,2001,23(6):26-31.
[4]张焕颖.高速运动目标ISAR 成像方法研究[D].西安:西安电子科技大学,2007.
[5]黄小红,邱兆坤,王伟.目标高速运动对宽带一维距离像的影响及补偿方法研究[J].信号处理,2002,18(6):487-490.
[6]汪玲.ISAR 运动补偿技术研究[D].南京:南京航空航天大学,2003.
[7]Texas Instrument.Multicore programming guide[R].USA:TI,2009.
猜你喜欢
百科探秘·航空航天(2022年6期)2022-06-28
上海理工大学学报(2021年3期)2021-07-20
电子制作(2019年15期)2019-08-27
计算机与数字工程(2019年4期)2019-05-07
小学生学习指导(低年级)(2018年12期)2018-12-29
人生十六七(2016年14期)2016-12-01
电子制作(2016年21期)2016-05-17
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
海峡姐妹(2014年5期)2014-02-27
