
基于时间序列预测的融合跟踪定位算法
2015-04-13 04:14陈新河
移动通信 2015年21期
陈新河
(中国电信股份有限公司广州研究院,广东 广州 510630)
1 引言
物联网的核心在于实现物与物以及人与物的信息交互,其中很重要的前提是全面感知,即利用传感器、射频识别及二维码等感知技术在物理世界中对物体实现随时随地的信息采集和获取,然后将这些信息通过网络传到用户或者服务器端,最后依托智能计算技术为用户提供各种各样的服务。这其中基本所有采集的信息都必须和物体的具体位置相关联,否则这个信息就大失意义。
可以说定位技术是物联网一个重要的基础,也是物联网区别于PC互联网的重要特征。“LBS+”正在改变很多行业的传统使用模式,特别是在交通导航、医疗、社交、监控和电子商务等领域,将会起着越来越重要的作用。
定位技术发展到现在已有数几十年的历史,在室外环境中GPS得到了广泛成熟的应用,但在城市中心、室内等复杂环境,卫星信号无法穿透建筑物,GPS往往不能发挥作用,无法用于定位。虽然后来出现的A-GPS技术能够通过结合移动通信运营基站与GPS对用户进行快速定位,从一定程度上解决了GPS信号无法穿透建筑物的问题并广泛应用于具有GPS功能的手机上,但在室内环境中仍存在着严重的多径干扰、大量的人员干扰以及环境变动,因此只有新的且不同于GPS系列的技术出现,才有解决室内定位的可能。
2 现有研究现状
按照定位原理划分,现有的室内定位技术主要可以分成3种方法:基于几何学原理的几何测量法、基于统计学原理的指纹定位法以及基于运动学原理的惯性导航法。
2) 混合励磁磁通切换电动机的合理结构的研究。在深入分析永磁双凸极、磁通反向电动机等定子永磁型电动机的基础上,参考混合励磁电动机的设计思路,并结合永磁材料技术和铁心软磁材料等技术的最新发展,探索合理的混合励磁磁通切换电动机结构。
2.1 几何测量法
几何测量法主要分三个步骤:第一是对无线电信号的一个或几个电参量(振幅、频率、相位或传播时间)进行测量;第二是根据电磁波传播特性把测量的电参量转换为距离、距离差及到达角度等,用来表示位置关系;第三是利用几何原理建立方程,运用各种算法或技术来实现位置估计。
在OpenCV和python的协同作用下,车牌识别研究更加便捷,每个技术环节也越来越简洁与规范,这为今后的深入研究提供强大的平台与技术。在整个研究过程中有如下问题值得今后进一步探讨。
典型的几何测量法有TOA(Time of Arrival,到达时间),TDOA(Time Difference of Arrival,到达时间差),AOA(Angle of Arrival,到达角度)等,其中TOA、TDOA利用用户端到至少3个不共线的参考点的距离,通过3个圆的交点或者双曲线交叉点实现定位;AOA则是利用测量来自多个参考点接收信号的到达角度实现定位。
但在复杂的室内环境下,受多径干扰及非视距传播等影响,时间和角度的测量都会存在较大的误差,定位精度不高。与此同时,此类方法的实现需要预先知道AP(Access point,接入点)的具体位置,且需要使用专用的硬件测量设备,不满足实际应用的需要。
李太嶂所猜一点不错。德公公是个多疑之人,早就怀疑左右护卫有二心。像他这种身居高位的当权者,最喜欢的部下,大多不是最能干的,而是最忠心的。老太监听人暗中禀报,二护卫不止一次抱怨主人吝啬;尤其让他不能容忍的是,二护卫居然私下里跟福王府接洽,意图另攀高枝。
2.2 指纹定位法
正是由于复杂多变的室内环境,导致在不同的位置信道特征也会不一样,同一个位置点所采集的数据特征具有唯一性。指纹定位技术则有效地利用此特性,通过采集各参考点位置的 RSS(Received Signal Strength,接收信号强度)样本数据,构建反映该室内环境位置场强的指纹数据库,将接收到的待测点的RSS与指纹库中数据进行特征匹配,找出最相似的结果进行定位,具体原理与流程如图1所示。
现有成熟的室内定位系统大多依赖定位数据库,但该方法前期需要大量的数据采集工作,布局维护成本高,且不同的室内环境具备不同的数据库特征,使得现有很多解决方案都是针对特定的环境,如果移植到其他环境会受到不同的局限,可拓展性差。
2.3 惯性导航法
(3)模型定阶、参数估计以及递推定位
此方法不依赖于外部设施且受环境影响小,可实现自主导航,但相对位移的计算是通过加速度的二重积分算的,长时间的导航会快速增加误差的累计。此外,此方法对终端设备和要求较高,需要增加额外的网络开销,且不满足用户要求的定位技术功耗低、响应时间快、不增加成本的体验需求。
SOP培训组满意度及各项能力培养方面均明显优于传统组(P<0.05),说明SOP培训法有明显优势,见表2。
综上所述,现有这些基本定位技术存在着不同的优缺点,单一的定位技术已不能满足物联网的定位需求。当前定位技术的发展趋势是采取多种技术的融合,满足不同的定位环境所提出的需求,以达到最优的解决方案。
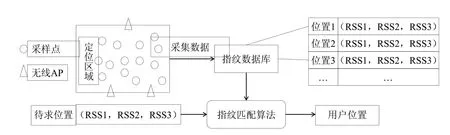
图1 指纹定位技术的原理与流程图

图2 惯性导航示意图
3 基于时间序列预测的融合跟踪定位算法
其实对于大多数运动目标而言,运动具有一定的规律性,这种规律会对目标位置的估计提供额外的信息,而现有的定位系统中,终端设备在静止状态下在各个时刻独立完成用户定位的方案,并没有利用好这额外的信息。下文将引入时间序列预测模型,充分挖掘运动前后位置的相关性,对现有的定位系统的结果进行修正,用于提高定位精度。
3.1 时间序列预测模型
差分平稳化处理:
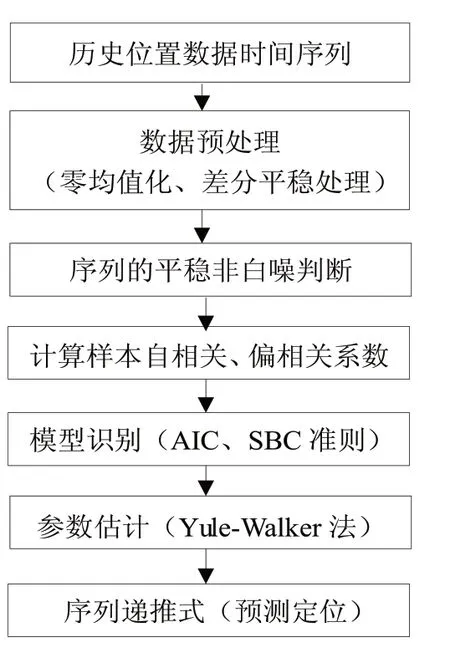
图3 时间序列预测定位流程图
(1)数据预处理:零均值化处理、差分平稳处理
零均值平稳随机序列是运用时间序列预测法的前提,但通常系统所观测的时间序列数据并非一组零均值的平稳随机序列,这时需要进行数据预处理:零均值化和差分平稳化处理。一般情况下,非平稳序列在经过一阶差分或二阶差分后都可以实现平稳化,具体如下所示:
零均值化处理:
设时间序列预测子系统和原有静态定位子系统的局部位置估计分别为Yt和Yt',经融合计算后的目标位置估计为Y,则最优位置估计为各局部位置估计的线性组合:

时间序列分析(Time series analysis)是一种基于随机过程理论和数理统计学的动态数据处理方法,它根据系统观测到的时间序列数据,通过曲线拟合和参数估计来建立数学模型,研究随机数据序列所遵从的统计规律,常用在国民经济宏观控制、市场潜量预测、气象预报、水文预报及农作物病虫灾害预报等方面,流程如图3所示:

若序列自相关和偏自相关系数图像均呈现截尾的趋势,则可以判定该序列符合ARMA(Auto-Regressive and Moving Average Model,自回归滑动平均模型),接下来可利用AIC(Akaike information criterion,赤池信息量准则)与SBC( Schwartz Bayesian criterion,施瓦兹贝叶斯准则)对模型进行定阶,即确定p和q值:
(2)自相关系数和偏相关系数
对于移动物体来说,位置的时间序列一个重要特征就是前后相邻位置的相关性。基于这种相关性,就可以实现根据位置的历史值去预测其未来值。
教学评价是指依据一定的客观标准,对教学活动及其结果进行测量、分析和评定的过程。教学评价的功能主要表现在:诊断教学问题、提供反馈信息、调控教学方向、检验教学效果。广义的教学评价包括对教师教学工作的评价和对学生学习结果的评价。本文中笔者讨论的教学评价,是指对学生学习结果的评价。
由图一可以看出许钧对翻译学的研究主要始于20世纪80年代,这一时期,我国引进了许多西方优秀的教育著作,促使许多译者致力于著作的翻译工作,自然也引出了翻译学的研究。可以看出1987-1900年,许钧对翻译研究的发文总量每年平均只有1篇。1991-1993年,其发文量突然上升,到了1995-1996年间,最高每年发文达到7篇之多。21世纪受“走出去”政策的影响他对翻译学科的研究也活跃起来,几乎保持在平均每年3-4篇左右。
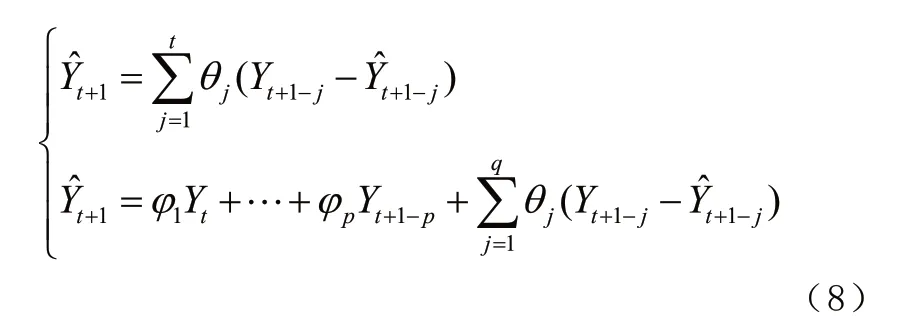
则下面我们就可以利用ARMA(p,q)序列的递推式进行预测定位:
在时间序 列模型中,因变量之间的关系很复杂,它们可能受到不止一个变量的影响,简单相关系数并不能够真实地反映出变量Yt和Yt-k之间的相关性,而偏自相关系数则是在消除其他变量影响的条件下所计算的两变量之间的相关程度,即当Yt与其滞后1,2,3,…,k-1期时间序列Yt-1,Yt-2,…,Yt-3的作用己知的条件下,Yt与Yt-k的相关程度。它常用来配合自相关系数,共同辨认适当的时间序列模型,偏自相关系数表示如下:
如图2所示,基于惯性导航的室内定位方法通过在终端中的传感器如陀螺仪、方向传感器及加速度传感器等,可测量出位移者行进的方向、旋转矢量和加速度等关键指标,从而计算出相对位移,并与初始位置叠加推算物体的当前位置。

判定阶数最优的标准是使AIC与SBC的值最小。其中,n为待估参数个数(即p+q可能存在的常数项),T为样本总量,RSS为残差平方和。对于模型参数,可采用Yule- Walker法进行估计。至此,我们就可以得出位置序列的ARMA表达式:

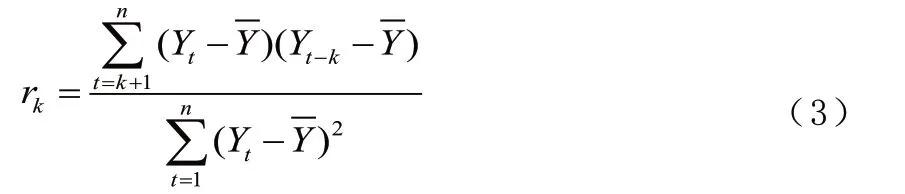
自相关系数是用来度量同一变量在不同时期的数据之间的相关程度,随机序列的自相关系数会接近于零或等于零,而具有明显规律(如上升、下降、季节波动、循环波动等)的时间序列,数据会呈现较高的自相关性,自相关系数表示如下:
3.2 融合定位算法
(1)算法原理
如图4所示,现有的定位系统中,终端设备独立完成用户定位,会得出一个定位估计以及定位误差范围,同时根据目标的运功轨迹,利用时间序列预测模型可建立目标运动方程,从 而得出另一个定位估计,最后将两者融合计算得出最后估计,可有效降低误差范围。
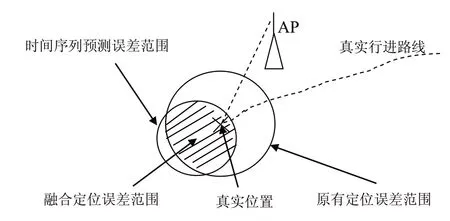
图4 融合跟踪定位模型原理图
(2)算法流程
每个子系统把局部最优估计连同估计误差方差输入融合系统进行融合计算,得到最终的全局最优估计值,同时,主系统将融合的最优估计、系统估计误差方差矩阵以及信息权重等信息反馈给各局部子系统,动态重置子系统各参数,具体流程如图5所示:
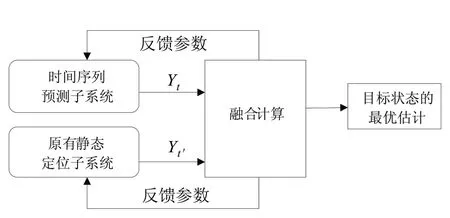
图5 融合跟踪定位模型流程图
(3)具体实现
由于时间序列预测子系统是根据物体的历史数据进行预测定位,而原有静态定位子系统是根据信号接收强度进行定位,因此两者互不干扰且相互独立,可以认为两个子系统不相关。
土地的生态功能优先是农村土地资源利用结构优化的前提。在土地规划过程中先确定规划区域的生态基本功能,进一步可对耕作条件差的区域进行有顺序的、有目的的退耕还林,对可以开发利用的建设场地进行内部潜力的挖掘,采用临近变更原则,最终形成具有特色的区域性土地利用结构。对优化结构后减少的土地,可相应地减少田坎面积、分散状用地、工业用地等,或选取布局零散、地力弱、管理不变的区域进行统筹规划。
2.1.3 护肝剂缺五味子的阴性对照溶液的制备 按护肝剂的制备方法制得除五味子的护肝剂,取1 mL置于PE管中,水浴蒸干,其余操作同“2.1.1”项。

因为两个子系统不相关,则可令:
单片机最小系统是组成系统的最小控制系统,是系统的中央控制系统,通常作为主机部分,是系统必不可少的一部分,是重中之重。在很多单片机的设计中,都可以捕捉到最小系统的身影。同时,值得一提的是它是控制模块组成最小系统,其模块具体包括:组成MCU的单片机控制部分、不可缺少的晶振电路以及每个系统都会设有的复位电路。

即可得到最优的全局位置估计:

其中Pt、Pt'分别为时间序列预测子系统以及原有静态定位子系统的估计误差方差矩阵。
4 实验仿真
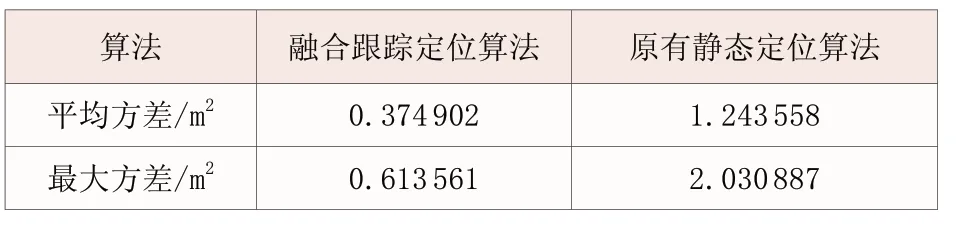
表1 定位算法比较
图6为真实位置、原有静态定位算法、本文融合跟踪定位算法的仿真定位结果。从图中可以看出,本文的融合跟踪定位算法定位轨迹始终在真实位置附近波动,有效消除了原有静态定位中远离真实值的定位点,定位结果更接近真实的轨迹,有效实现了对目标的跟踪定位。
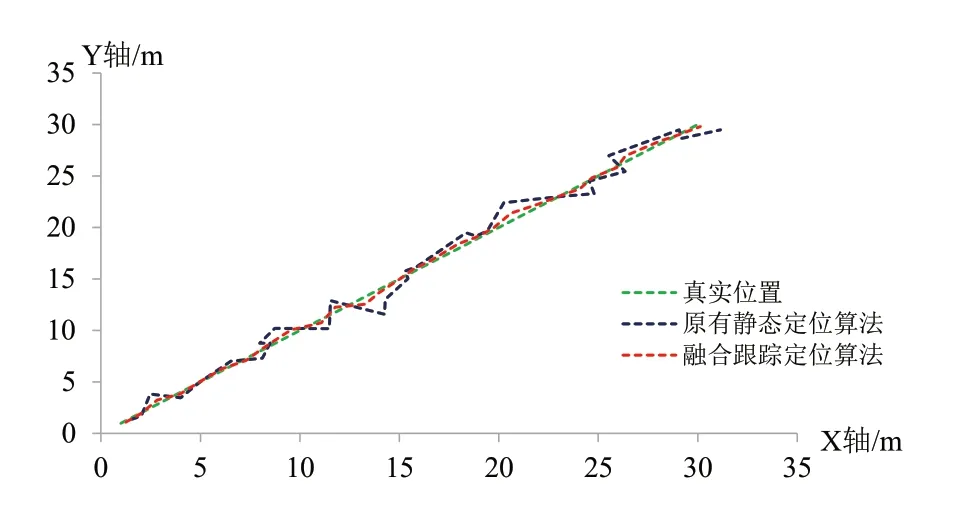
图6 定位仿真对比图
图7为本文融合跟踪定位算法与原有静态定位算法在各个定位点的误差值,从仿真结果可以明显看出本文融合跟踪定位算法可以有效抑制定位误差,并且在大部分条件下的定位效果均优于原有静态定位算法。
随着越来越多的企业尝到了科研众包的两大益处,相较从前,他们更加敢于在科技创新大潮中去竞争。不少的企业甚至慢慢养成了“企业要发展,产品(服务)要不断创新”的常态观念。调研中几家平台都反馈,平台上不少企业从最初的“要我创新”变为如今的“我要创新”,而一些实力较强、规模较大的企业,更是视科研众包为一条发现创意、解决技术问题最优方案的有效途径。
1407 Association between type 2 diabetes mellitus and hepatitis B virus-related hepatocellular carcinoma: a prospective cohort study
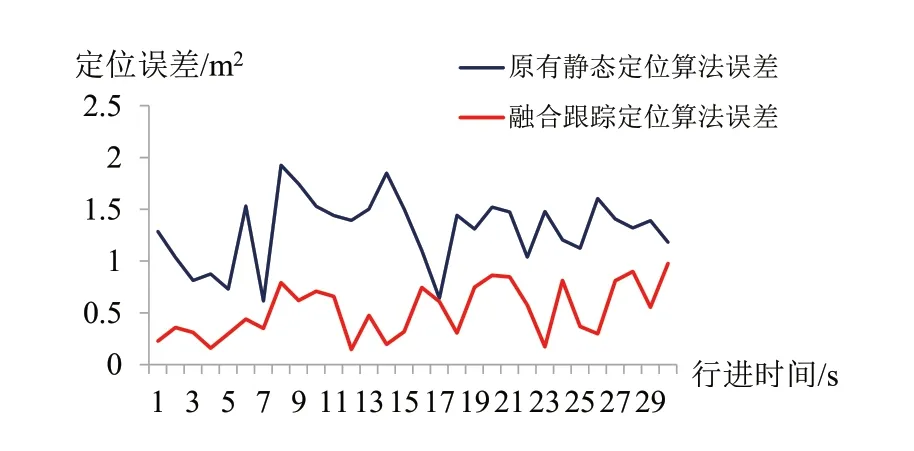
图7 定位误差对比图
5 结束语
综上所述,本文提出了一种基于时间序列预测的融合跟踪定位算法。针对跟踪定位问题,利用定位目标位移的时间相关性,并基于定位目标的历史位置信息,通过时间序列预测算法 预测出目标下一个时间段的位置信息,再将预测的结果与现有定位系统的定位结果进行融合计算,有效地实现了对目标的跟踪定位。同时,仿真结果表明,时间序列算法的引入可以有效地减小定位误差,实现更好的跟踪定位效果。
[1] 李渝,李青. 常见无线通信定位技术研究[J]. 无线通信技术, 2012(1): 8-12.
[2] 邓志安. 基于学习算法的WLAN室内定位技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2012.
[3] 冯辰. 基于压缩感知的RSS室内定位系统的研究与实现[D]. 北京: 北京交通大学, 2010.
[4] 史小红. 基于TDOA的无线定位方法及其性能分析[J]. 东南大学学报, 2013(3): 252-257.
[5] 白嗣东. 基于数据挖掘分类聚类理论的指纹法室内定位优化[D]. 北京: 北京交通大学, 2014.
[6] 宣秀彬. 基于Wi-Fi和航位推算的室内定位方法研究[D]. 秦皇岛: 燕山大学, 2013.
[7] 赵国顺. 基于时间序列分析的股票价格趋势预测研究[D]. 厦门: 厦门大学, 2009.
[8] 陈宝全,毛永毅. 小波分析法解决无线定位跟踪定位问题[J]. 电信科学, 2013(10): 98-102.
[9] 罗磊,田增山,陈俊亚. EKF定位跟踪算法研究[J]. 重庆邮电大学学报: 自然科学版, 2009(1): 50-52.
[10] 李川. 基于Kalman的滤波目标精确跟踪技术研究[J]. 通信技术, 2009,42(6): 205-207. ★
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
黄河之声(2022年10期)2022-09-27
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
中学生数理化(高中版.高二数学)(2022年4期)2022-05-25
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年9期)2020-02-06
铁道通信信号(2018年8期)2018-11-10
知识经济·中国直销(2018年3期)2018-04-12
学习月刊(2015年1期)2015-07-11
