
两自由度可控装载机构动力学分析与研究
2015-04-09 12:36蔡敢为
重型机械 2015年4期
张 林,蔡敢为
(1.广西大学土木工程学院,广西 南宁 530004;2 广西大学机械工程学院,广西 南宁 530004)
0 前言
随着施工建设由过去的大拆大建向精细化施工发展,以及“数控一代”装备创新工程的实施,传统工程机械设备因为噪音大、能耗高、污染严重、维护保养成本高等问题[1-4]以很难适应大环境的发展,这给传统机械设备即带来了带来了换代升级所面临的各种挑战也带来了巨大的机遇。广西大学蔡敢为首先提出了将可控机构技术[5-11]应用到工程机械领域的设想,并进行了相关研究,获得了许多研究成果[12-14]。应用可控机构技术的可控机构式工程机械[15-16]不仅解决了液压传动工程机械面临的诸多问题,也解决了传统机械式工程机械输出运动缺乏柔性、传动系统复杂等问题,可控机构式工程机械具有智能化程度高、全车电控、零排放、低噪音、电传动系统机械效率高等特点,并且易实现工程机械自动化、远程操控等,特别适合未来现代化施工需要。
为了获得可控装载机构动力学特性,方便驱动系统驱动电机选型,现根据达朗贝尔原理对可控装载机构进行动力学逆问题进行建模求解。
1 力学问题简化
可控装载机构的受力分析如图1 所示,构件i(i=2,3,…,9)的质心用Si表示,负载的质心用SL表示;主动杆驱动力矩用Mi(i=1,2)表示。为了便于进行力学分析,在允许存在较小误差的前提下,根据可控装载机构结构特点和工作特性,作如下假设:
(1)各杆件i(i≠1,4,5,7)的质心Si在对应杆长的中心位置。
(2)动臂的质心S4在铰孔D 点处。
(3)铲斗的质心S5在铰孔E 与斗尖L 的连线上,且距离铰孔E 的距离为
(4)摇臂的质心S7在铰孔H 与斗尖I 的连线上,距离铰孔H 距离为
(5)为较全面的考虑到各种作业工况,特别将负载的质心SL选定在斗尖L 处。
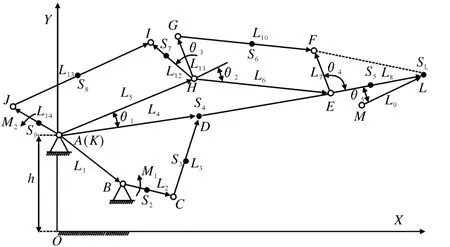
图1 可控装载机构受力分析Fig.1 Stress analysis of controllable loading mechanism
2 动态静力分析与建模
2.1 动态静力分析
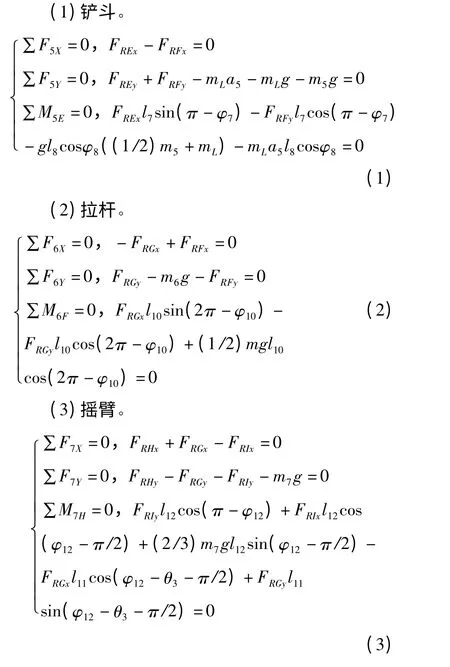
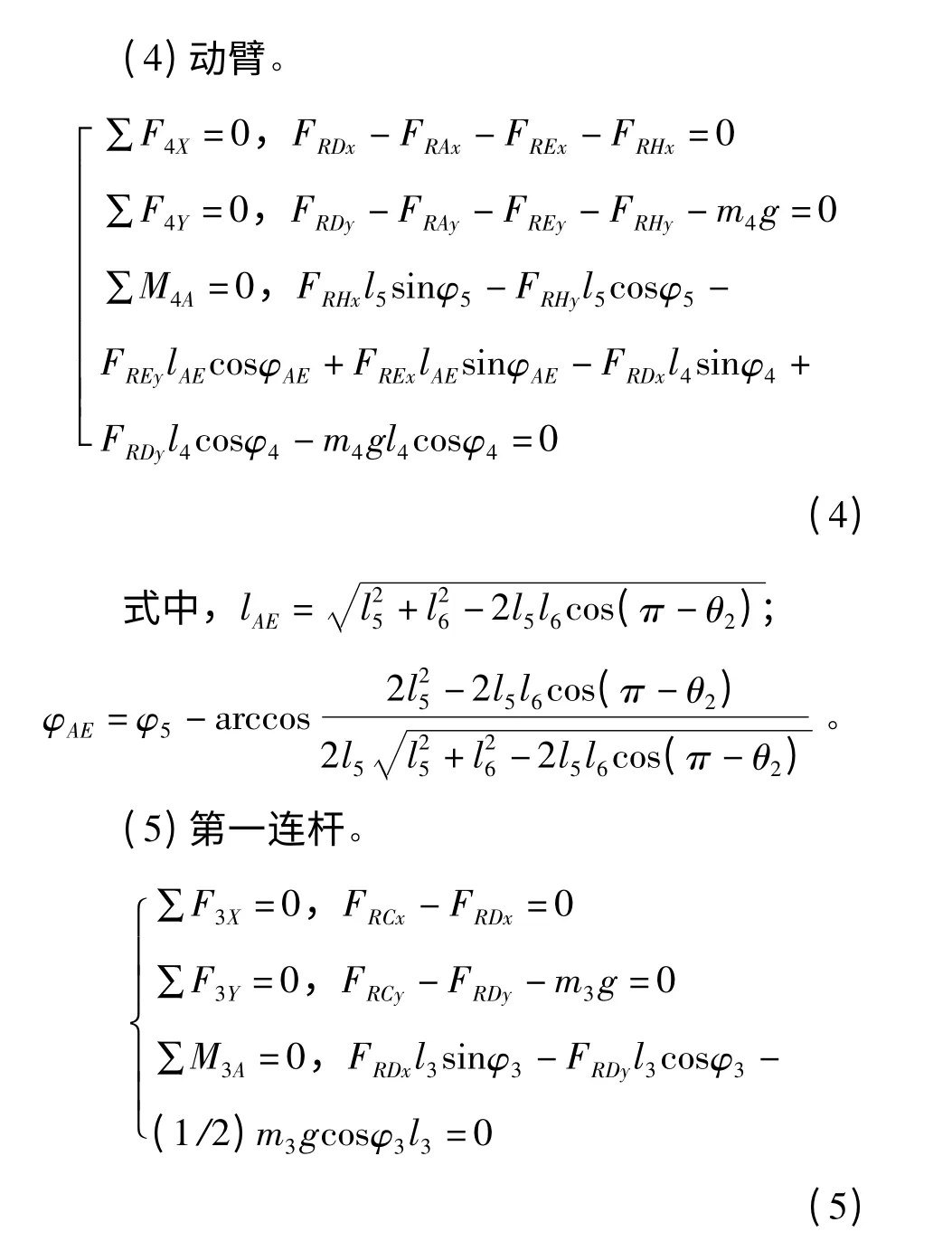
构件i(i=2,3,…,9)的质量用mi表示,mL表示负载的质量;铰孔Θ 受到的约束反力表示为FRΘ;构件i(i=2,3,…,9)的重力表示为FGi,其中负载的重力表示为FGL,在垂直方向负载对铲斗的惯性力记为FI5,重力加速度用g表示。可控装载机构各构件的受力情况如图2 所示。可控装载机构动态静力学问题可概括为:已知各杆件矢量Li的角位移φi以及模li;动臂、铲斗、摇臂角度参数θi(i=1,2,…,5),杆件质心Si(i=2,3,…,9)以及负载质心SL的位置,杆件质量mi(i=2,3,…,9)以及负载质量ml,铲斗垂直加速度为α5,重力加速度g。求在上限举升工况下,各铰点约束反力和两主动杆的驱动力矩。
令∑FiX(i=2,3,…,9)表示构件i 所受到的力在X 轴方向的投影之和;∑FiY(i=2,3,…,9)表示构件i 所受到的力在Y 轴方向的投影之和;∑MiΘ(i=2,3,…,9)表示构件i 所受到的力和力矩对铰孔Θ 的力矩之和。现应用达朗贝尔原理,建立可控装载机构各构件的动态静力学平衡方程:
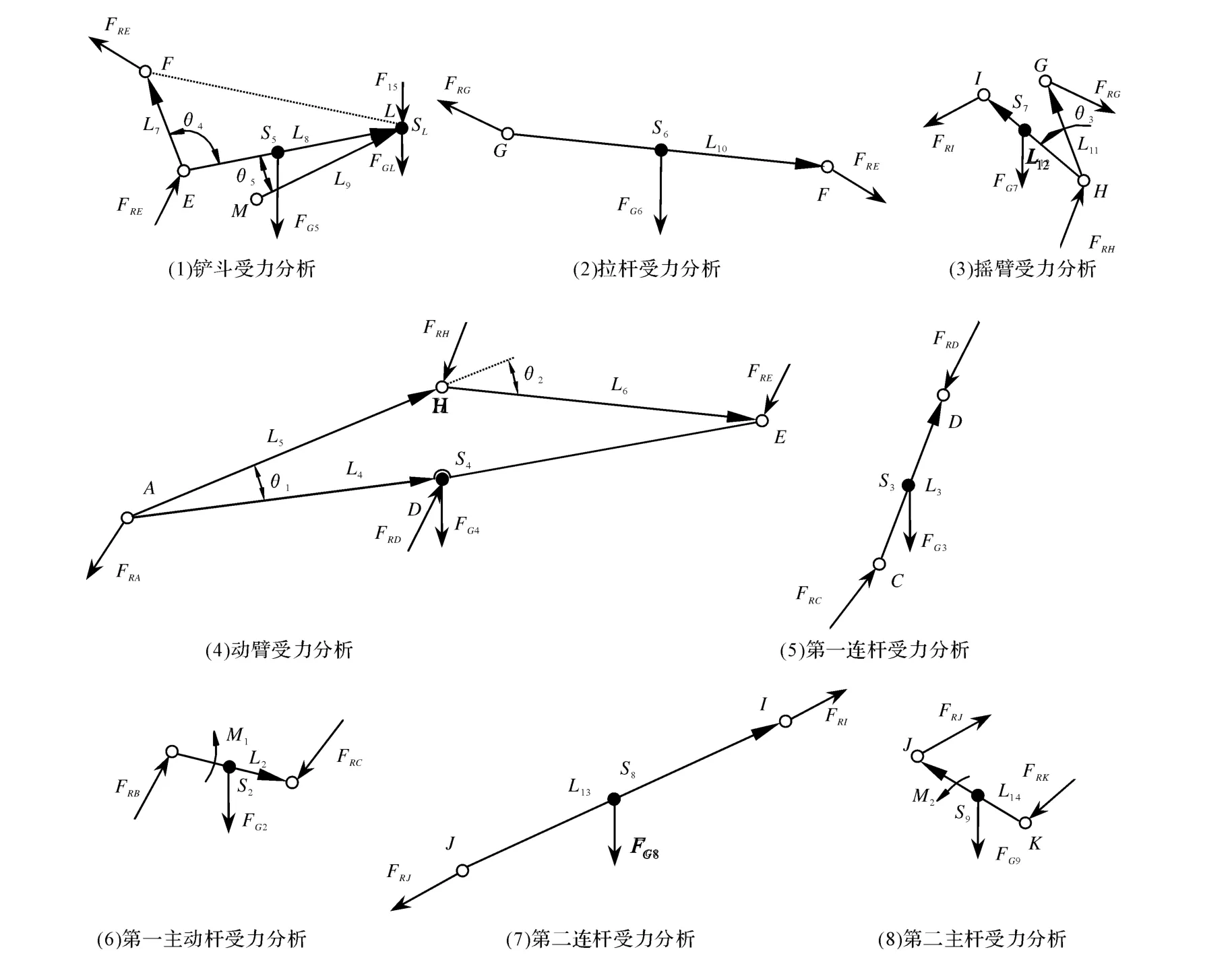
图2 各构件受力分析Fig.2 Stress analysis of each component

2.2 建立动态静力模型
将式(1)至(8)整理成矩阵形式,有:

上式中,矩阵E 和矩阵G为已知参数矩阵,矩阵F为待求参数矩阵。
对式(9)两端同乘以矩阵E 的逆矩阵,可得:

通过上述动态静力分析,便获得了可控装载机构主动杆的驱动转矩。
3 输入功率预估
根据功率计算公式,在已知两主动杆的输入转矩、角速度的情形下,便可得到各主动杆瞬时输入功率,而各主动杆的输入功率P0i(i=1,2)应为瞬时输入功率的最大值,即:
(1)第一主动杆输入功率:

(2)第二主动杆输入功率:

4 动态静力仿真
利用Pro/E 建立可控装载机构虚拟样机模型,并导入ADAMS 中进行仿真分析。可控装载机构额定载荷为200kg,考虑到装载机在实际作业中存在过载及各种复杂载荷情形,在铲斗斗尖位置,加载一个大小为2700N,沿重力方向的力,运行仿真,通过软件自带测量工具对仿真结果进行处理,得到了第一、二主动杆驱动力矩和功率,分别如图3~6 所示。
根据图3~4 所示仿真结果可知,第一主动杆最大负载力矩为1092.7 N·m,第二主动杆最大负载力矩为1290.2 N·m。从图5~6 可知,第一主动杆最大驱动功率为1.0 kW,第二主动杆最大驱动功率为0.97 kW。

图3 第一主动杆负载力矩Fig.3 Load torque of the first active rod
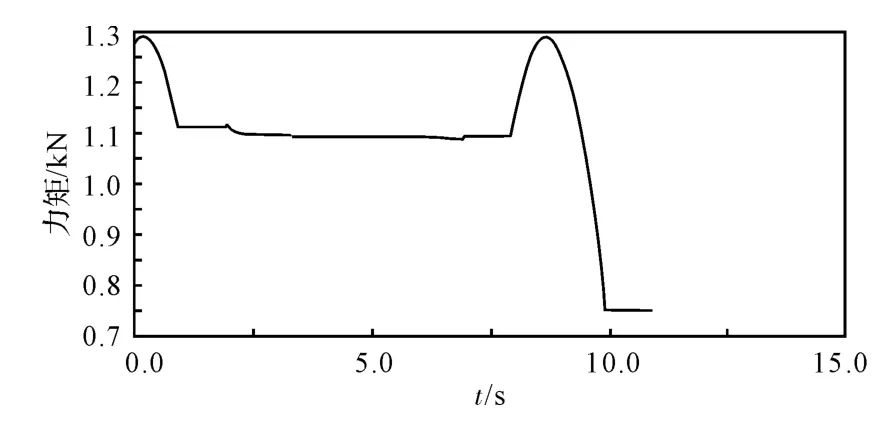
图4 第二主动杆负载力矩Fig.4 Load torque of the second active rod
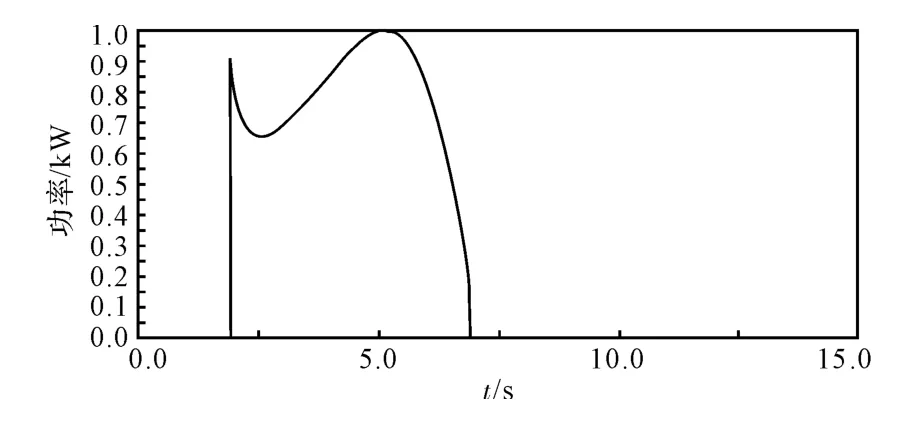
图5 第一主动杆驱动功率Fig.5 Drive power of the first active rod
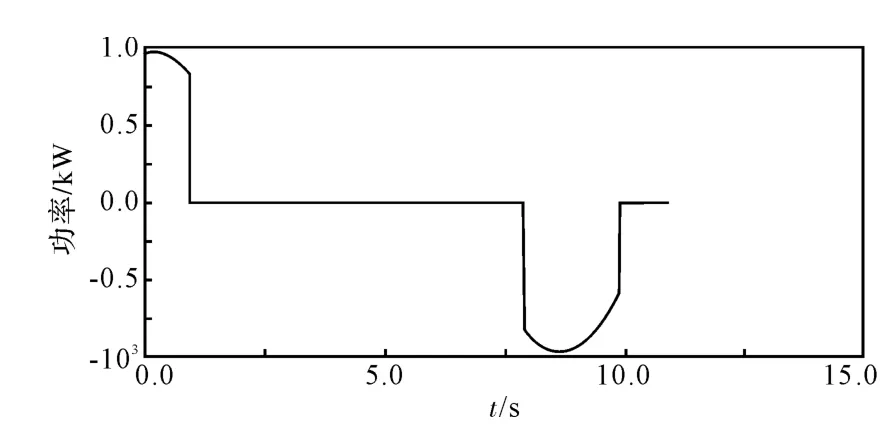
图6 第二主动杆驱动功率Fig.6 Drive power of the second active rod
5 电传动系统搭建及样机实验
在该款可控装载机构电传动系统功率评估前工厂已采购有105SZD02-DZ 系列直流电机和130SZD01-DZ 系列直流电机,以及KA67R37、K77R37 系列斜齿-螺旋锥齿轮减速机,现根据仿真结果,搭建可控装载机构电传动系统,如表1 所示。

表1 电传动系统搭配Tab.1 Electric drive system of the controllable loading mechanism
以表1 所述电传动系统为可控装载机构的动力系统,新型电动装载机研制完成后,顺利进行了轻度场地实验,分别在工地进行了200 kg、300 kg 建筑废料举升实验和400 kg 铁块举升实验,分别如图7~9。

图7 新型装载机举升实验—200 kg 土块Fig.7 New type loader lift test-200kg clod

图8 新型装载机举升实验—300 kg 土块Fig.8 New type loader lift test-300kg clod

图9 新型装载机举升实验-400 kg 铁块Fig.9 New type loader lift test-400kg iron slab
6 总结
本文针对一种型装载机工作装置进行了动力学分析和实验研究,通过建立可控装载机构的动态静力模型,求解了各铰点约束反力和主动杆驱动力矩,并进行了主动杆输入功率预估,动态静力模型的建立为可控装载机构动态性能研究提供了理论基础。通过可控装载机构样机研制与场地实验,一方面验证了可控装载机构动力学分析研究的准确性;另一方面验证了将可控装载机构技术应用于微小型工程机械领域的可行性。该研究将为可控机构式工程机械研发设计起到一定的参考借鉴作用。
[1]彭熙伟,陈建萍.液压技术的发展动向[J].液压与气动,2007(3):1-5.
[2]蒋真平,朱喜林.ZL50G 型轮式装载机噪声测试与频谱分析[J].工程机械,2007,38(12):15-20.
[3]杜博聪.节能减排 中国工程机械企业任重道远[J].今日工程机械,2007(10):50-51
[4]权龙,高有山,程珩.提高工程机械能量利用率的技术现状及新进展[J],液压与气动,2013(4):1-9
[5]Chuenchom T,Kota S.Synthesis of programmable mechanisms using adjustable dyads[J].ASME Journal of Mechanical Design,1997(02):232-237.
[6]Erdman A.G.Modem Kinematics:Developments in the Last Forty Years[C].New York:John Wiley&Sons Inc.,1993.
[7]HONG B,ERDMAN A G.A method for adjustable planar and spherical four-bar linkage synthesis[J].Journal of Mechanical Design,2005,127(3):456-463.
[8]Hongsen Yan,Guojhih Yan.Integrated control and mechanism design for the variable input-speed servo four-bar linkages[J].Mechatronics,2009,19(2):174-285.
[9]张新华,张策,田汉民.混合驱动机械系统建模的理论依据[J].机械科学与技术,2001,(6):857-859.
[10]李瑞琴,邹慧君.可控机构的分类及研究[J].机械设计与研究,2002,18(4):17-20.
[11]周洪.可控机构的设计理论及其应用研究[D].上海:上海交通大学,2000.
[12]张林,蔡敢为,王小纯,等.九杆两自由度可控机构式装载机工作装置的正解分析[J].矿山机械,2015,43(3):49-53.
[13]潘雨辰,蔡敢为,王红州,等.具有变胞功能的电动装载机构构态进化拓扑结构分析与基因建模[J].机械工程学报,2014,50(1):38-46.
[14]蔡敢为,张林,王小纯,等.多自由度可控装载机构的构型设计与综合研究[J].机械设计与制造,2015 (4):1-4.
[15]蔡敢为,张林,潘宇晨,等.一种多连杆装载机构:中国,201110189561.7[P].2011-12-28.
[16]白勇军.大型重载伺服机械压力机的关键技术及实验研究[D].上海:上海交通大学,2012.
猜你喜欢
中国造纸(2022年8期)2022-11-24
汽车实用技术(2022年14期)2022-07-30
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
商品与质量(2021年43期)2022-01-18
北京航空航天大学学报(2021年4期)2021-11-24
表面工程与再制造(2019年1期)2019-12-04
中国惯性技术学报(2019年6期)2019-03-04
汽车观察(2018年9期)2018-10-23
电子制作(2018年10期)2018-08-04
