基于波形分析的轿车CAN-BUS系统故障诊断研究
2015-04-05 12:13:00张学涛狄恩仓
河南科技 2015年19期
张学涛 狄恩仓
(中州大学机电与车辆工程学院,河南 郑州 450044)
汽车控制单元的数量在不断地上升,控制单元数量的增加,使得它们之间的信息交换也越来越密集[1]。而CAN数据总线可提供特殊的局域网,为汽车的集群控制器单元进行密集数据交换。汽车CAN(Controller Area Network)总线,称为控制单元的局域网,它是车用控制单元传输信息的一种传送形式。
1 Can-bus的日趋普及
以大众汽车集团为例,于1997年率先在PASSAT的舒适系统上采用了传送速率为62.5Kbit/s的Can-bus,2001年,大众集团公司进一步提高了Can-bus的设计标准,将舒适系统Can-bus提高到100Kbit/s,驱动系统提高到 500Kbit/s,2003年,大众集团公司在新PQ35平台上使用五重结构的Can-bus系统,及单线的LIN-BUS。目前大众在华销售所有车型均采用CAN数据总线网络。
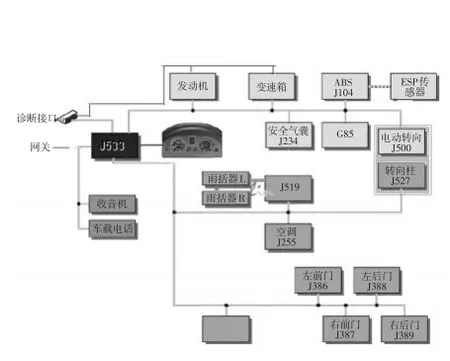
图1 轿车CAN数据总线网络
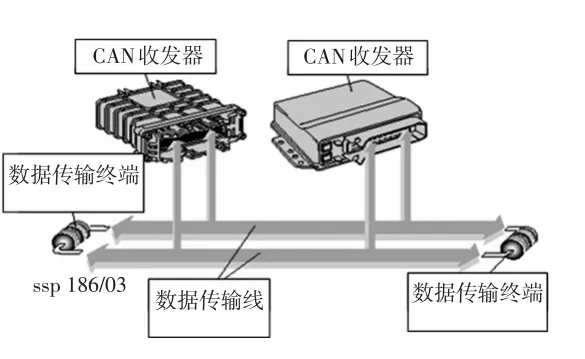
图2 Can-bus系统组成
2 轿车Can-bus系统的结构
Can-bus系统由CAN收发器、数据传输终端和数据传输线组成(如图2所示)。CAN收发器安装在控制器内部,同时兼具接收和发送的功能,将控制器传来的数据化为电信号并将其送入数据传输线。数据传输终端是一个电阻,防止数据在线端被反射,以回声的形式返回,影响数据的传输。数据传输线是双向数据线,由高低双绞线组成。CAN数据总线的两条导线分别叫CAN-High和CAN-Low线。两条扭绞在一起的导线称为双绞线。各个CAN系统的所有控制单元都并联在CAN数据总线上。
Can-bus采用双绞线自身校验的结构,如图3所示,这样既可以防止电磁干扰对传输信息的影响,也可以防止本身对外界的干扰。系统中采用高低电平两根数据线,控制器输出的信号同时向两根通讯线发送,高低电平互为镜像。并且每一个控制器都增加了终端电阻,以减少数据传送时的过调效应。
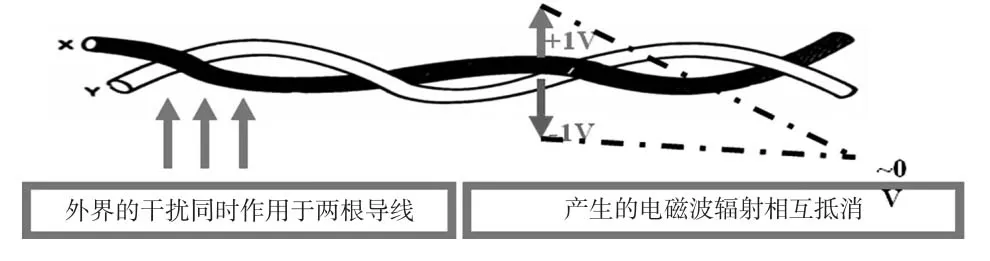
图3 自身校验结构的双绞线
目前轿车上的网络连接方式主要采用2条CAN。一条用于驱动系统的高速CAN,速率达到500kb/s,主要面向实时性要求较高的控制单元,如发动机、电动机等;另一条用于车身系统的低速CAN,速率是100kb/s,主要是针对车身控制的,如车灯、车门、车窗等信号的采集以及反馈,其特征是信号多,但实时性要求低,因此实现成本要求低。
由于不同区域Can总线的速率和识别代号不同,因此一个信号要从一个总线进入到另一个总线区域,必须把它的识别信号和速率进行改变,能够让另一个系统接收,这个任务由网关(Gateway)来完成。另外,网关还具有改变信息优先级的功能。
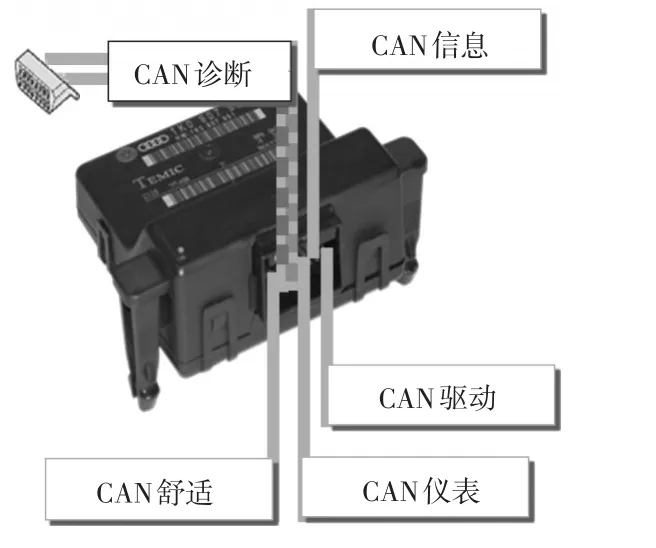
图4 CAN数据总线网络区域
3 示波器波形分析
当Can-bus数据总线系统出现故障时,如:通讯线路短路、断路以及线路物理性质引起的通讯信号衰减或失真,都会引起多个电控单元无法工作或控制系统错误动作。判断是否为数据总线故障时,可采用示波器来观察通讯数据信号是否与标准通讯数据信号相符。
4 CAN数据总线典型故障及示波器分析
在CAN-BUS上,信息传递是通过两个一进制逻辑状态0(显性)和1(隐性)来实现的,每个逻辑状态都对应于相应的电压值控制单元,利用两条线上的电压差来确认。
4.1 典型故障1:Can-Low断路
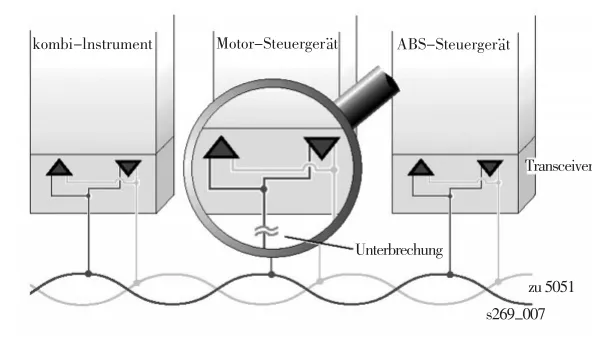
图5 Can-Low断路故障
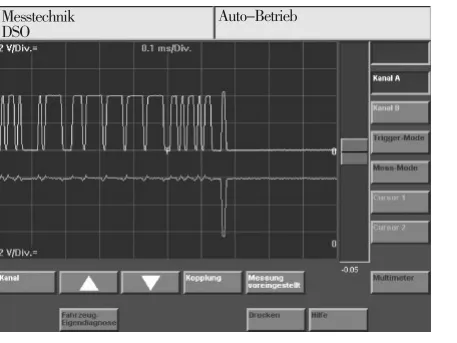
图6 Can-Low断路故障波形
从波形图上可看出,Can-Low的波形为一条直线,说明Can-Low的电压基本不变,观察Can-Low一直处于高电平电压。结合CAN收发设备内部电路(如图7所示),Can-Low电路上有上拉电阻,如果Can-Low一直为高电位,则Can-Low为“+”电压,可判断出Can-Low处于断路状态。
4.2 典型故障2:Can-High断路
波形图显示Can-High的波形为一条直线,说明Can-High的电压基本不变,而观察Can-High一直处于低电平电压。结合CAN收发设备内部电路(如图7所示),Can-High电路上有下拉电阻,如果Can-High一直处于低电平电压,则Can-High为接地,可判断出Can-High处于断路状态。
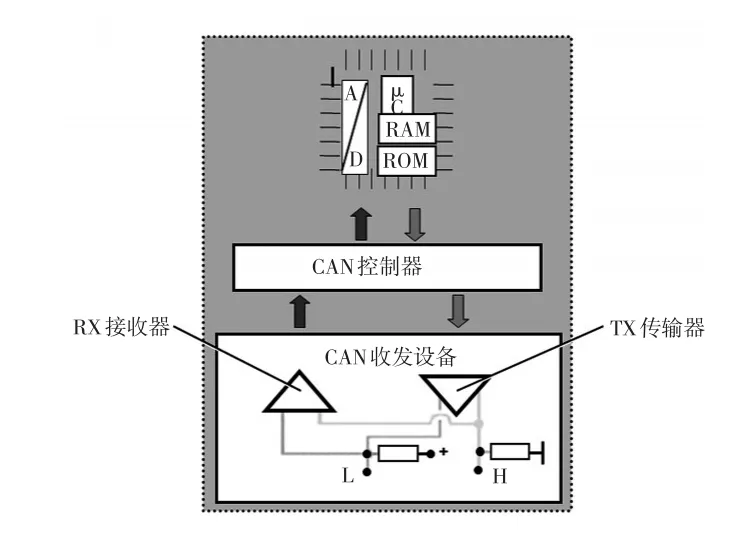
图7 CAN收发设备内部电路
4.3 典型故障3:Can-Low与地短接
波形图显示Can-Low的波形为一条直线,说明Can-Low的电压基本不变,再观察Can-Low一直处于低电平电压,结合CAN收发设备内部电路(如图7所示),可判断出Can-Low也处于与地短接状态。
5 结论
传统汽车检测由于没有使用示波器,经常是汽车明明有故障,而扫描工具检测却显示系统正常。随着Can-bus在汽车综合控制上应用的广泛化,Can-bus的故障诊断技术必将得到重视。
[1]于万海.汽车单片机与车载网络技术[M].西安:西安电子科技大学出版社,2007.
猜你喜欢
汽车与驾驶维修(维修版)(2024年6期)2024-07-03 15:42:45
建材发展导向(2021年16期)2021-10-12 05:39:02
电子制作(2018年17期)2018-09-28 01:56:56
中学课程辅导·教学研究(2018年3期)2018-06-15 11:36:48
科技资讯(2017年27期)2017-11-24 10:06:06
中国核电(2017年1期)2017-05-17 06:10:12
电气化铁道(2016年2期)2016-05-17 03:42:36
中国高新技术企业(2015年16期)2015-04-30 21:30:07
汽车维护与修理(2014年10期)2014-02-28 12:15:05
河南科技(2014年16期)2014-02-27 14:13:15