
隧道裂缝快速检测装置硬件系统研究
2015-04-05 12:12李洋刘晓孙贝
河南科技 2015年16期
李洋刘晓孙贝
(山西省交通科学研究院,山西 太原 03300000066)
近些年随着我国经济快速发展,基础设施建设也提升到了更高的水平,大量公路投入运营,未来很长时间内,大量的公路隧道需要定期检测和维护。截至2014年年底,全国公路隧道共有12 404处、总里程1075.67万米,其中特长隧道662处、总里程276.62万米,长隧道2 623处、总里程447.54万米,近年隧道里程数如图1所示。

图1 我国近年公路隧道里程数
衬砌裂缝作为隧道病害中最为危险的病害之一,严重影响着隧道寿命和行车安全,即使是很细微的裂缝在外载荷作用下由于疲劳效应使之不断扩展也可能会引起结构的进一步变形破坏、引起结构漏水、掉块等一系列重大病害[1]。因此,定时检测和发现衬砌表面裂缝并跟踪裂缝扩展趋势,对高速公路隧道安全运营、延长使用寿命、降低维护费用等方面有着不可替代的作用,也是高速公路信息管理系统的需要。
目前国内公路隧道裂缝的检测方法主要以人工肉眼和人工仪器为主。前者主要在日常巡检中检测人员沿着隧道走,用肉眼观察裂缝大小、形状和位置,并做好相应记录。定期检测中主要通过人工仪器检测,借助路灯车或升降平台将检测人员送至拱顶附近,这种方法不仅工作效率低,检测速度约为0.02km/h,同时个人主观程度大、花费高、危险性大,且需要交通管制,更重要的是不能够对病害信息进行数据化管理,无法得到裂缝等病害扩展趋势和速率[2]。面对公路隧道检测过程中的上述问题,2015年修订的《公路隧道养护技术规范》中规定隧道经常检查宜采用人工与信息化手段相结合的方式,就是考虑了现有检测手段的缺点和快速智能检测方式的优点,鼓励智能检测设备投入应用[3]。图像检测技术作为快速检测手段最主要的方式之一,近年来得到广泛应用[4],本文提出的快速检测装置即基于图像处理技术。
1 隧道裂缝快速检测装置整体设计方案
智能检测系统分为图像采集、图像处理和数据管理三个环节,涉及的硬件主要在图像采集系统中,该子系统采用机器视觉技术将采集系统(数字相机、镜头、图像采集卡、数据存储器等)、定位系统(惯性导航装置、距离传感器、速度编码器等)、照明系统(高强度光源等)、供电系统(蓄电池等)、多轴稳定平台集成于移动设备上,形成一套载体式集成检测系统,各部件的工作关系如图2所示。

图2 隧道裂缝快速检测装置硬件系统构成
快速检测装置在隧道中行驶,光源发射器将恒定功率的辅助光照射至衬砌表面。工业相机和光源保持相对固定关系,时刻接收衬砌表面图像,将光信号转换成电信号,再通过数据传输线将信号存储在计算机上。在公路隧道行驶中路面随机颠簸和系统自身震动会对图像接收过程产生影响,进而降低图像采集质量,不利于后期图像分析,所以需要一套运动补偿系统来抵消系统的震动。由于检测装置在行驶过程中不能保持恒定速度,相机触发频率需要与行驶速度保持恒定关系,通过速度编码器来实现这个功能。
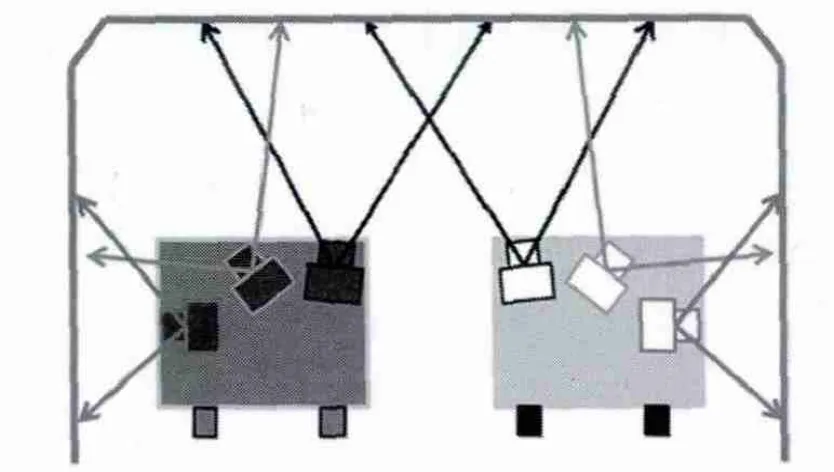
图3 相机方位示意图
通常公路隧道为两车道,检测装置在行驶过程中对靠近的半幅隧道轮廓进行画面采集。这种相机分布方式需要对同一个隧道进行两次画面采集,但是能够有效避免全幅画面采集过程中被旁边车道超车时阻挡另一侧隧道表面的问题,相机方位示意图如图3。
2 工业相机选型
工业相机作为整个硬件系统的核心部件,直接关系着图像采集质量和精度,工业相机按照不同感光芯片分为有CCD和CMOS两种[5]。CCD称为电荷耦合器件,里面排列整齐的光电二极管能够感应光线,把光信号转变成电信号。CMOS称为互补金属氧化物半导体,将晶体管集成在电路板上来接收光信号。CCD图像传感器的像素集成度高、体积小、成像质量好,但是相比于CMOS图像传感器价格昂贵,在拥有高分辨率的时候行频较低,拍摄速度会受到一定限制。
相机从感光单元的排列方式可以分为线阵和面阵两种,线阵相机通常只有一行感光单元,相对面阵相机制作简单、成本较低,具有两行感光单元的可以对物体同一个部位拍摄两次,通过相机内部算法求平均值后输出该部位的拍摄效果,这样有效提高了拍摄的稳定性。面阵相机可以获得一幅完整的图像,得到的数据量很大,不是很适合进行高清画面采集,同样不适用于隧道细微裂缝的拍摄。
公路隧道裂缝智能检测设备最主要的优势在于检测过程不需要交通管制,检测速度需要达到高速公路车辆正常行驶速度,目前我国规定隧道最高限速为80km/h即22.2m/s,对于检测精度为1mm裂缝的目标相机拍摄行频需要达到22.2×103mm/1mm=22.2k。对于设计时速为120km/h的高速公路,隧道净宽11m,侧墙建筑限界高度为2.5m,起拱线通常取1.6~1.7m,最小起拱半径为

设计中起拱半径可以超过最小值约30cm,则最大起拱半径为5.9m,拍摄半幅画面的总视场为

设定裂缝检测精度为1mm,检测过程中为了避免其他车辆从旁边超过时阻挡画面拍摄,所以每次只对靠近检测车占用的行车道一侧的半幅隧道断面进行拍摄,每拍摄一次需要的像素为
单个线阵相机分辨率通常为2k、4k、8k,考虑到工控机主板PCI插槽最多为4个,相机个数不宜超过4个,在此我们选择3个分辨率为4k的线阵相机。满足分辨率和行频为4k和22.2k的相机有:DALSA公司生产的p2-4x-04K40-7和p2-4x-04K40-10两款CCD相机,后者较前者有更大的像元尺寸和感光性,具体参数见表2。

表1 p2-4x-04K40-10性能参数表
3 结语
分析了我国公路隧道建设状况和现有隧道检测技术之后,提出了一套基于机器视觉技术的隧道裂缝快速检测方案,阐述了检测装置的整体设计思路和工作原理,详细介绍了硬件系统中各个构成部件的作用。相机作为整个系统的核心部件,选型工作起着至关重要的作用,对比了线阵和面阵相机的适用场合,结合公路隧道结构断面、检测速度和检测精度计算了线阵相机的分辨率和行频,选定了DALSA公司生产的p2-4x-04K40-10型号。智能化和快速化检测养护手段为我国高速公路隧道检测提供了一种全新而高效的方式,将会得到更加广泛的应用。
[1]王建秀,朱合华,唐益群,等.双连拱公路隧道裂缝成因及防护措施[J].岩土力学与工程学报,2005,24(2):195-202.
[2]钟悦鹏.某公路隧道衬砌结构检测及评价[D].广州:华南理工大学,2012.
[3]JTG H12-201.公路隧道养护技术规范[S].
[4]张娟,沙爱民,孙朝云.数字图像处理在道路无损检测中的应用[J].山西交通科技,2002(6):10-12.
[5]周林.基于图像处理的路面裂缝检测系统设计与研究[D].太原:太原理工大学,2013.
猜你喜欢
中国记者(2022年8期)2022-09-15
石油沥青(2021年4期)2021-10-14
石油与天然气地质(2021年3期)2021-06-29
少儿美术(快乐历史地理)(2020年5期)2020-09-11
人民交通(2019年16期)2019-12-20
中国外汇(2019年6期)2019-07-13
小读者(2019年24期)2019-01-10
意林·全彩Color(2018年7期)2018-08-13
中国公路(2017年12期)2017-02-06
小天使·四年级语数英综合(2016年11期)2016-11-29
