
红外离轴系统金属反射镜设计与分析
2015-04-03 08:57赵勇志曹玉岩
红外技术 2015年5期
范 磊,赵勇志,曹玉岩
红外离轴系统金属反射镜设计与分析
范 磊,赵勇志,曹玉岩
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
随着单刃金刚石数控车削技术的不断提高,越来越多的红外系统选用金属作为反射镜材料以提高系统的性价比。同共轴光学系统相比,离轴光学系统的反射镜结构和装调更为复杂,为了深入研究金属反射镜在红外离轴系统中的应用,提出了一种集Kinematic定位和柔性去应力相结合的轻量化金属反射镜结构。首先从金属结构件的加工特点出发,分析了金属反射镜的轻量化形式和安装结构;接着针对某离轴反射系统中口径最大的离轴主镜,按照各设计要素建立了金属反射镜结构模型;最后采用有限元仿真分析方法,在各种工况下,对该主反射镜进行了详细的分析,结果均满足光学设计要求。
离轴反射系统;金属镜;柔性结构;Kinematic定位;有限元方法
0 引言
近年来,随着数控单刃金刚石车削(SPDT)技术的不断提高,越来越多的红外系统采用金属作为反射镜材料[1]。和玻璃等非金属相比,金属具有低成本、易加工且可以直接安装等优点。红外离轴反射光学系统具有遮拦比小,焦距长,视场大等优点,同时受天气影响小,具备白天成像功能,广泛应用于空间和地面观测设备[2-5]。采用全金属材料的红外离轴反射系统,既能够满足红外波段成像需求,还能够最大限度地降低系统的造价,因此,越来越受到国内外研究人员的青睐。
国外,德国Jena-Optronik公司的JSS-56离轴三反系统,主镜口径最大为210 mm×190 mm,采用6061-T6铝合金材料,主镜结构如图1所示,系统结构如图2所示,镜面加工后,表面粗糙度RMS值为8.7 nm,面形误差RMS值约为100 nm,PV值600 nm[1];德国空间中心资助研发的Korsch三反红外探测器,反射镜最大口径为116 mm×116 mm,同样采用6061-T6铝合金,如图3所示为系统全金属结构,镜面加工后面形RMS值为70 nm,PV值为386 nm[6];Kitt Peak国家天文台Mayall望远镜上的IRMOS探测器是近红外波段的离轴反射系统,其次镜口径最大为284mm×264mm,材料为6061-T651,如图4所示为次镜背部结构图[7];美国的SHOTS Acquisition望远镜采用全金属离轴反射系统,用于舰载观测,其主镜为300mm铝镜[8]。国内,对于红外波段采用全金属镜的离轴反射系统的研究较少,多集中于共轴系统或非金属离轴系统,如图5所示为曹银花等人设计的Cassegrain系统中的金属主镜,镜面加工后面形PV值约为500 nm,表面粗糙度优于10nm[9];图6所示为长春光机所离轴反射系统中的SiC离轴主镜[10]。

图1 JSS-56金属离轴主镜
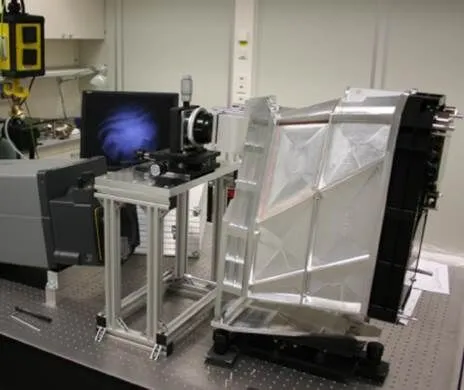
图2 JSS-56离轴系统

图3 Korsch离轴反射系统

图4 IRMOS离轴反射镜

图5 同轴金属主镜结构

图6 SiC离轴反射镜
金属镜的加工和安装同玻璃镜相比,存在较大差异,且红外离轴系统的工况和镜面装调较为复杂,因此,离轴金属反射镜结构及支撑设计非常重要。为了深入开展研究,本文针对某地面红外离轴三反系统中口径为316mm的离轴金属主镜,首先,从金属反射镜的结构特点出发,通过分析比较并结合主镜工况特点,提出了合理的主镜轻量化和柔性安装结构;然后建立了主镜的有限元模型,分析了不同工况下的镜面变形以及安装应力影响,结果均满足设计要求。
1 金属反射镜结构特点
1.1 金属反射镜安装形式
应用于光学系统的金属反射镜一般有两种安装形式,第一种同玻璃镜相同,可利用一个柱面(镜体外圆或内孔)和反射镜背面实现反射镜的定位安装;第二种是在远离反射镜镜面的位置处设置安装接口[11]。如图7所示为两种典型结构安装方式图。
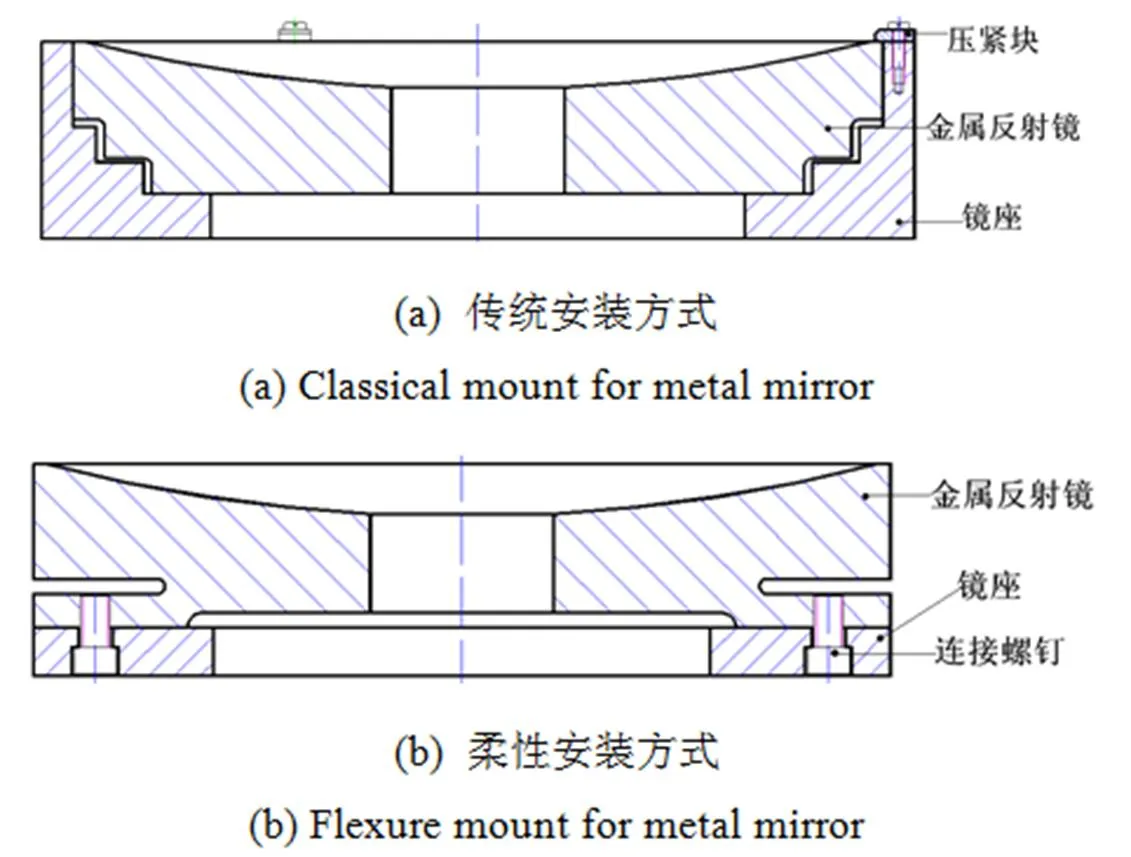
图7 典型金属镜安装方式
比较上述两种安装方式:图7(a)中,反射镜结构形式简单,易于加工,但安装接口面同镜面距离较近,装调时,安装应力容易传递到镜面引起镜面变形;图7(b)中,反射镜结构相对复杂,但可直接同镜座连接,且通过一个柔性环节可将安装界面和镜面隔离开来,起到卸载安装应力的作用。因此,对于中小口径的金属反射镜,采用第二种安装形式是较为合理的。
1.2 反射镜定位调整方式
中小口径反射镜的轴向位置调整一般通过三点实现,其结构形式是设置3个独立的定位安装面,通过机械加工和垫片调整的方式保证其位置精度。该结构形式的特点是简单可靠,但对加工精度要求较高,且由于是面面接触,因此很容易引入安装应力。
如图8所示为两种典型的Kinematic定位调整结构,图8(a)的理论调整中心在球凹处;图8(b)的调整中心在3个V形槽的连线交点。由于是点面接触,因此,两种结构都能够保证在某一点调整时,其余两点能很好地适应而不会引入额外的应力。另外,两种结构还能够很好地适应温度变化,不会因材料热胀的不一致性而引入结构应力。
因此,对于中小口径反射镜来说,采用Kinematic定位调整结构是较为合理的。
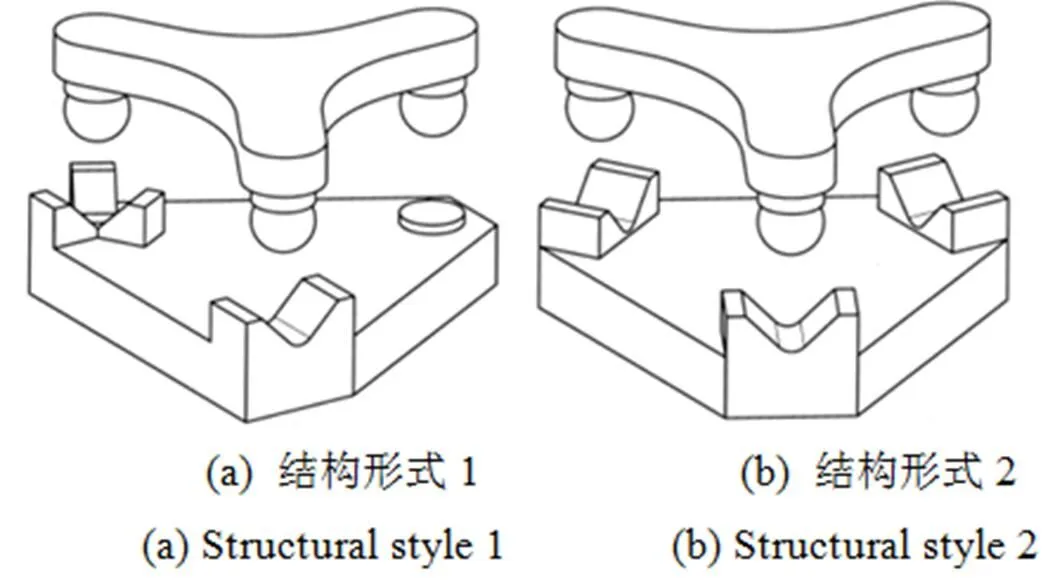
图8 Kinematic定位结构
1.3 金属反射镜的轻量化结构
为了尽可能降低系统重量,金属反射镜往往需要进行轻量化设计。金属反射镜的轻量化形式多种多样,考虑到金属加工的多样性,按结构形式一般分为:实心轻量化、中层开孔式和背部开放式3种,如图9所示为金属镜轻量化结构形式。
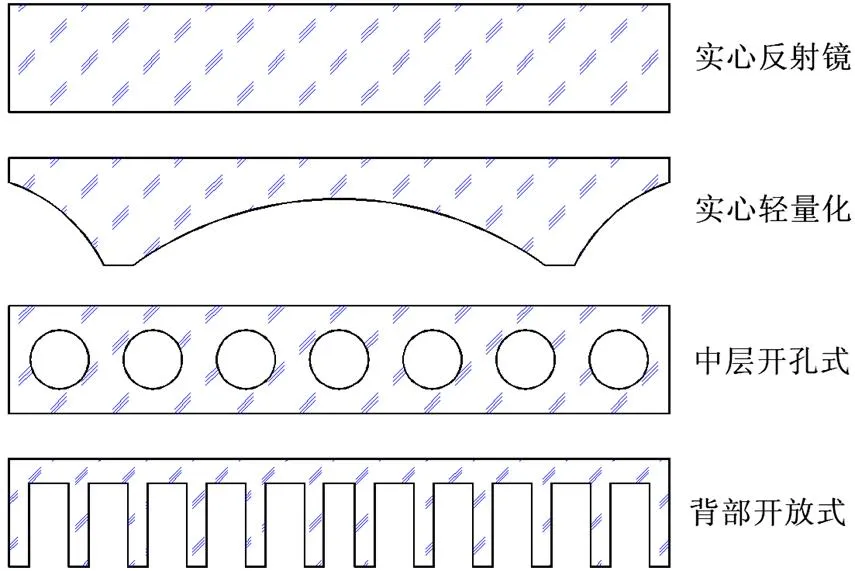
图9 金属镜轻量化形式
实心轻量化形式主要用于小口径或对轻量化率要求不高的反射镜;中层开孔轻量化形式主要用于中小尺寸的矩形反射镜,同时要求反射镜厚度较大;背部开放轻量化形式应用广泛,也可应用于较大口径反射镜,具有广泛适用性,且根据反射镜形状可采用不同的轻量化孔形式。因此,对于口径较大的金属反射镜,选择背部开放式轻量化形式较为合理。
铝合金6061材料相对硬度较大、具有长期稳定性且加工性能良好,在红外波段应用最广。从图1~图5也可看出,采用铝合金6061材料的上述几种轻量化形式反射镜都易实现,具体形式主要取决于反射镜尺寸及反射镜安装方式。
1.4 离轴反射镜的特点
如图10所示为本文研究的红外离轴反射光学系统,工作波段为7.7~9.7mm。该系统由主镜、次镜、三镜和后续成像透镜组成,如表1所示为主、次、三镜的光学参数表。
由图10可以看出,离轴反射系统同共轴系统相比,除了应保证各反射镜面形外,离轴反射镜镜的装调更为复杂,需严格保证反射镜的离轴量、镜面倾角和空间间隔。因此,反射镜的设计必须考虑必要的调整环节。
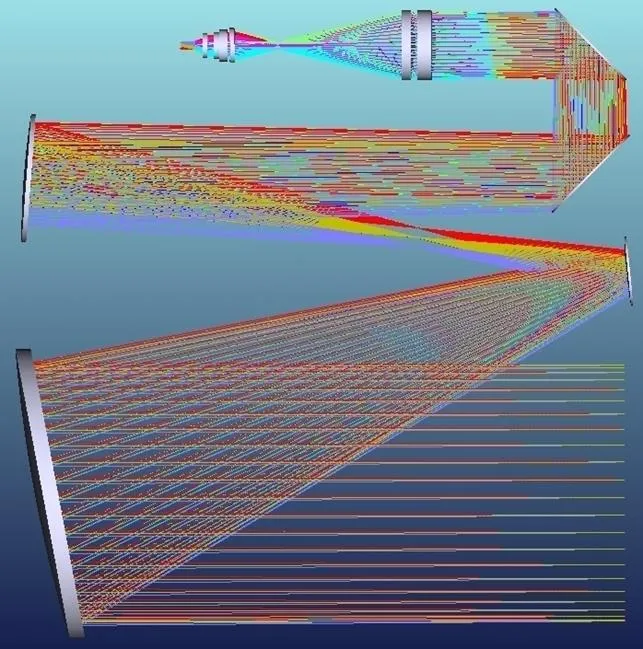
图10 离轴反射光学系统图
由表1可以看出,主镜口径最大,随着系统光轴俯仰角的变化,主镜存在以下两个极限工况:一是光轴竖直,镜面倾斜指向天顶方向;二是光轴水平,镜面倾斜指向水平方向。装调方面,该离轴主镜只具有一维对称性,且与次镜相对夹角较大,因此主镜的倾斜调整很重要。
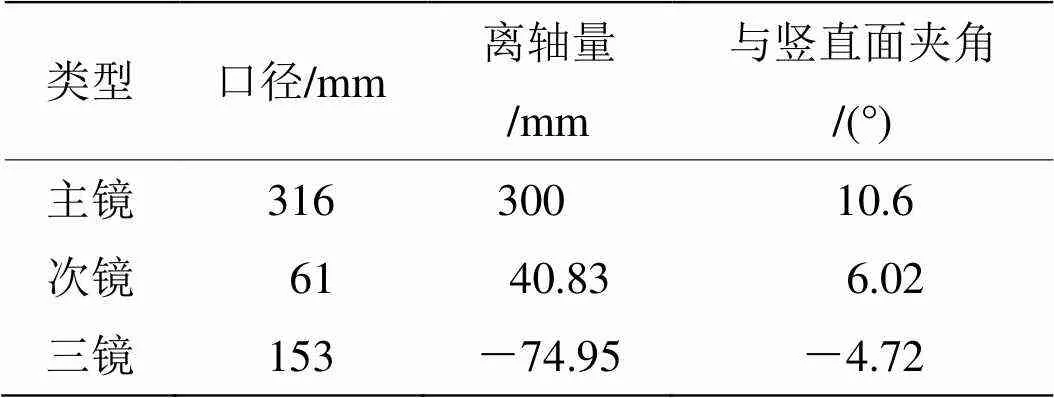
表1 主要光学参数
因此,该主镜的结构应能够同时集成柔性安装、运动学定位调整和轻量化结构,从而能够在各种工况下都很好地满足主镜的面形和位置调整要求。
2 主镜结构设计及分析
2.1 主镜轻量化结构设计
2.1.1 主镜结构形式
如图11所示为离轴反射系统反射镜的两种镜体结构,一种是楔形结构,即反射镜自身包含镜面同竖直面的夹角;另一种是平凹形,需通过调整安装面倾角保证镜面和竖直面的夹角。
理论上讲,两种结构形式都能满足设计要求。但是,当镜面倾角一定时,随着口径的增大,楔形结构的不等厚度比(最大厚度与最小厚度之比)会越来越大,镜体重量增加的同时,反射镜所受载荷的不均匀性增大,当光轴指向不同角度时,镜面面形的控制比较困难。因此,综合考虑上述两方面原因本文选择第二种结构形式。
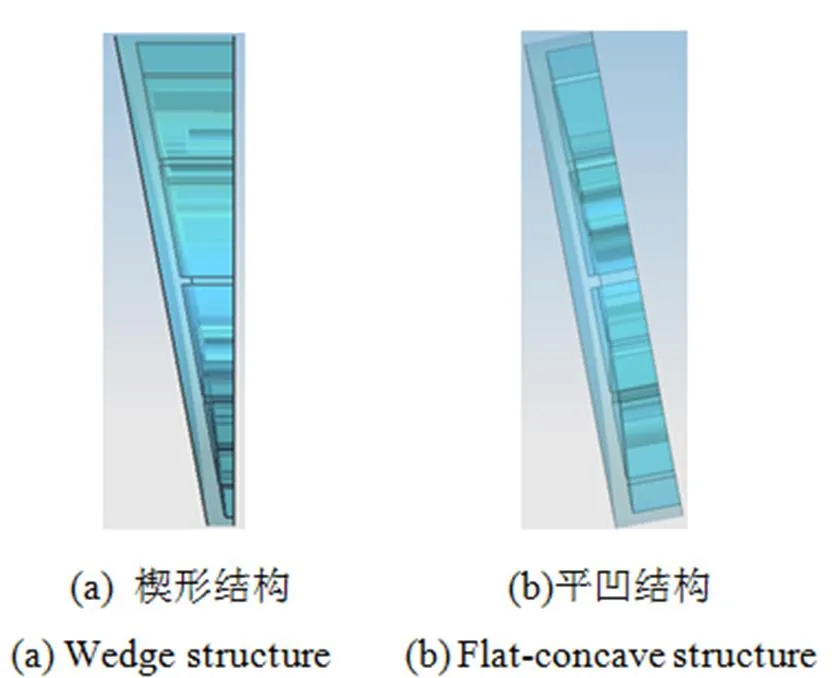
图11 离轴主镜外形结构
2.1.2 主镜镜厚比选择
径厚比的选择会影响镜面变形,同时也直接影响反射镜的轻量化率。根据Roberts关于平板实心镜厚比选择公式(1):
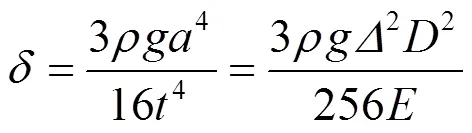
式中:为镜面最大变形量,μm;为材料密度,kg/m3;为反射镜半径,m;为材料弹性模量,MPa;为镜厚,m;为径厚比。
主镜材料选用铝合金6061,材料参数如表2所示。取为0.16mm(1/4,=632.8nm),根据式(1)计算得径厚比=18.5,即镜厚=17mm。根据背部开放式反射镜的厚度比实心镜约厚20%的经验理论[12],镜厚=20.4mm,取安全系数为1.2,选镜厚=25mm。

表2 铝合金6061物理参数表
2.1.3 主镜轻量化结构建模
根据对金属镜柔性安装及轻量化结构的分析,结合该主镜结构集成设计的需求,设计了该金属主镜的结构,如图12所示。
该金属主镜采用背部开放式轻量化结构形式,轻量化孔为扇形孔,在主镜外边缘均匀分布3个柔性安装接口,目的在于卸载安装引起的集中应力、温度变化导致的热应力。整个结构设计紧凑,且易于加工。更重要的是安装结构设置在外部便于装调时主镜的拆装和调整。
建立主镜的安装定位结构如图13所示,其中定位调整由3个球头调整螺钉和V形槽完成;调整完毕后,通过旁边两个带有蝶形弹簧的锁紧螺钉紧固。
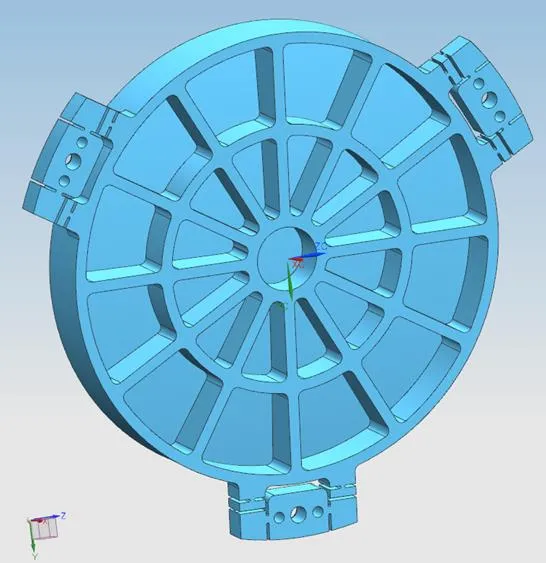
图12 离轴主镜详细结构
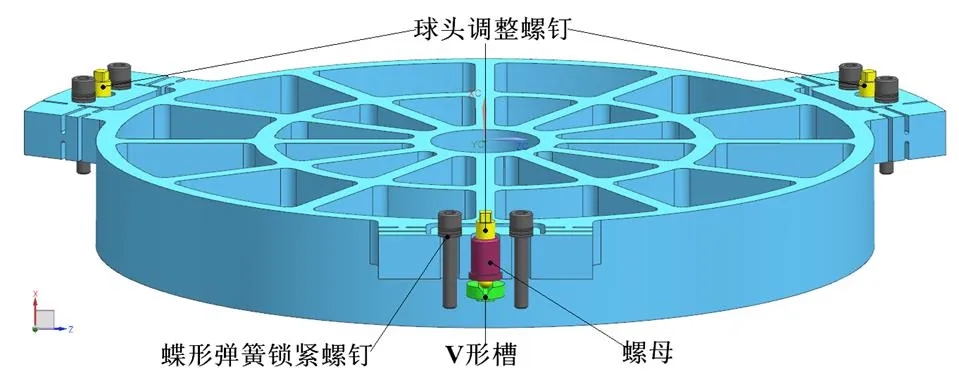
图13 主镜Kinematic定位结构
2.2 主镜支撑分析
2.2.1 无安装应力的静力学分析
为分析主镜的支撑面形,如图14所示,利用MSC.Patran建立了主镜的有限元模型,采用能更好地拟合镜面的10节点Tet10单元,模型共计246732个单元。边界约束条件如下:约束3个定位螺钉固定孔的UX和UY自由度,约束3个定位安装面的UZ自由度。
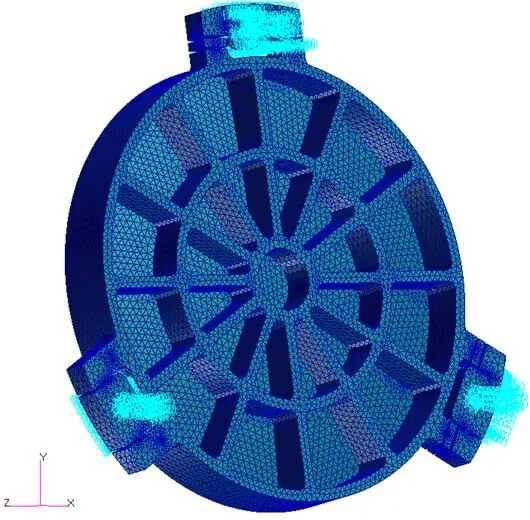
图14 主镜有限元模型
如图15所示为该离轴系统总体结构图,随着跟踪架方位和俯仰运动,系统光轴随之变化。如表3所示为系统光轴指向两个极限位置时,主镜在重力作用下的计算结果;图16和图17分别为对应的主镜变形云图和应力分布云图。结果显示主镜在重力作用下的镜面变形相对较小,可以满足光学系统对反射镜面形精度的要求。
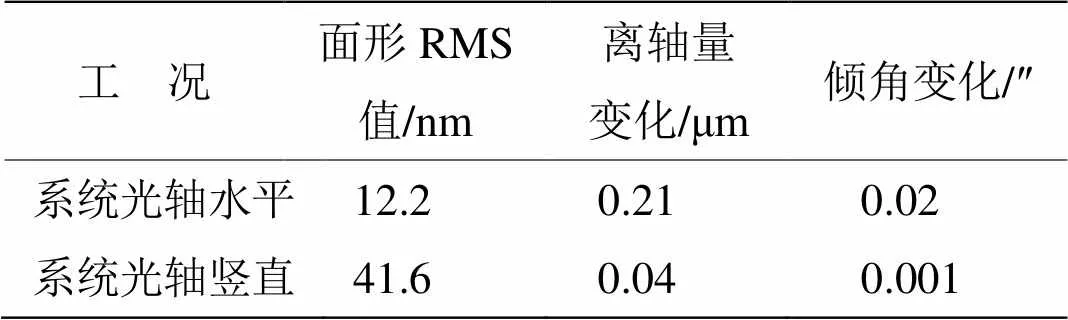
表3 主镜在重力作用下计算结果

图15 红外离轴系统结构图
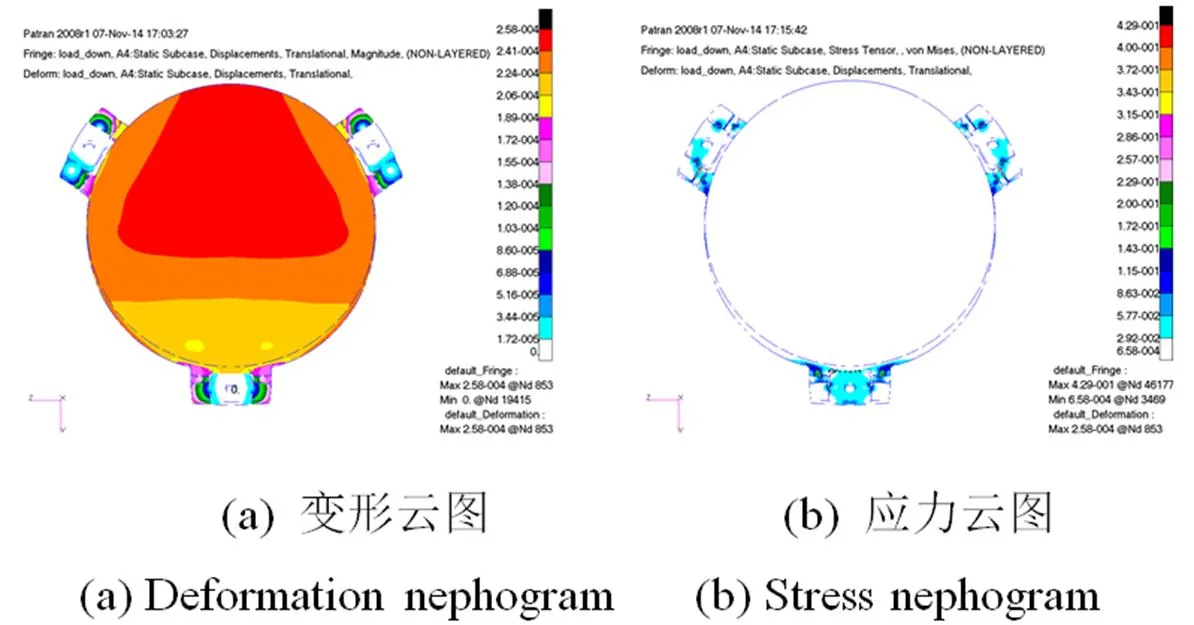
图16 系统光轴水平时主镜的变形云图和应力云图
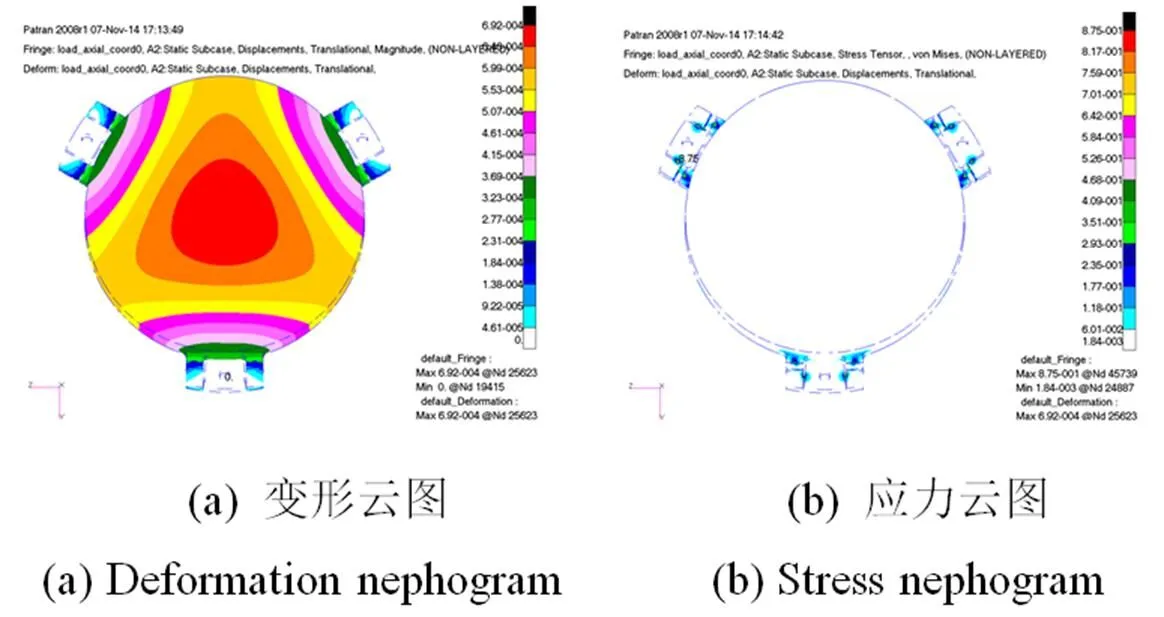
图17 系统光轴竖直时主镜的变形云图和应力云图
图18所示为系统光轴在不同俯仰角下,对应镜面面形RMS值曲线,从图中可以看出,最大面形出现在系统光轴与重力方向成10.6°,即主镜镜面同重力方向垂直,且最大值为42.2nm。
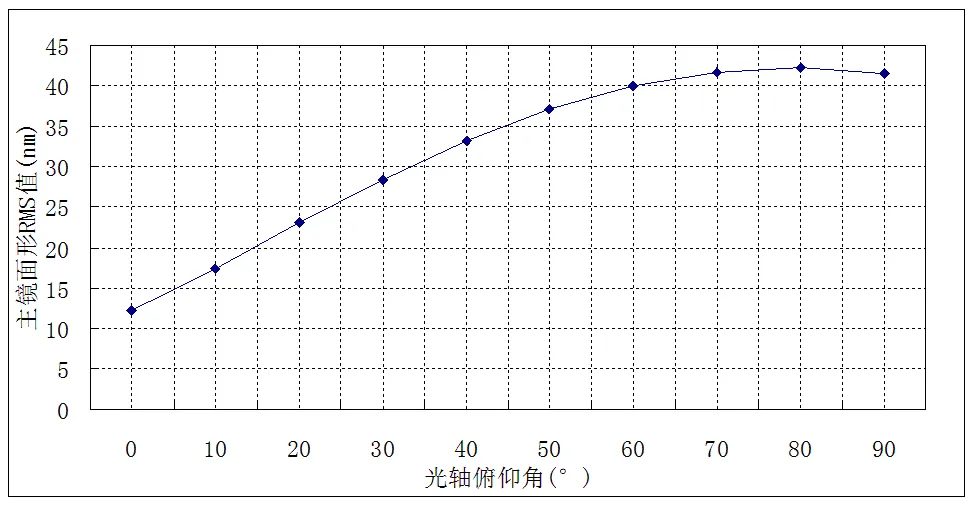
图18 不同系统光轴指向下的镜面面形RMS值
2.2.2 有安装应力的静力学分析
由于定位采用了基于Kinematic原理的结构,采用球头和V形槽接触后,在主镜安装界面的轴向以及沿V形槽径向一般都不会产生安装应力。而在实际安装时,由于螺钉锁紧力的存在,很容易在安装界面处引起安装应力。当安装应力传递到镜面时,就会引起镜面的畸变。为了验证该金属镜柔性结构的合理性,本文模拟了存在安装应力时镜面的变形。
假定主镜在3个安装界面处每个锁紧螺钉沿轴向施加50N的压紧力,在重力作用下,分析镜面面形及应力分布,如图19(a)所示为有限元模型。计算此时主镜面形误差RMS值为42.31nm,约/15(=632.8nm),能够满足该系统波段的成像要求。而且从应力分布云图上看,应力主要集中在柔性结构处,很难传递到镜面上。因此,说明该结构具备一定的卸载锁紧安装应力的能力,如图19(b)所示为主镜应力分布云图。
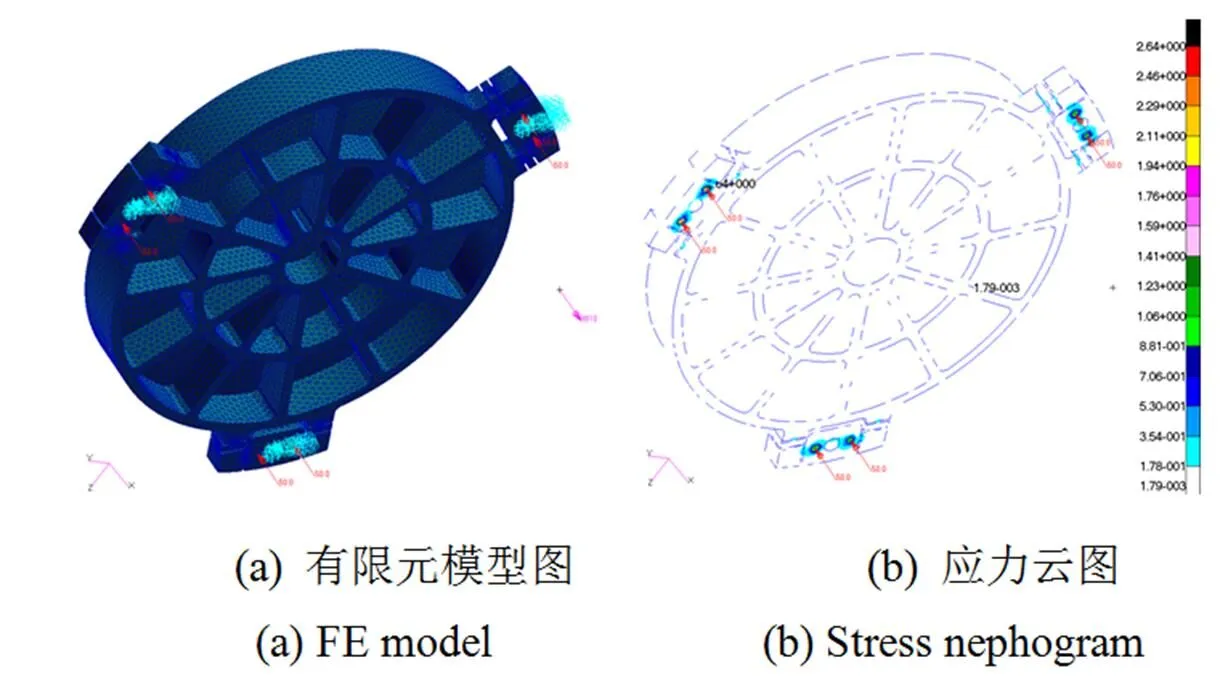
图19 安装应力下的主镜有限元模型和分析结果
3 结论
本文从金属反射镜的加工特点出发,介绍了金属反射镜的结构设计原则。并以一块口径为316mm的离轴金属主镜作为实例进行了详细的结构设计,提出了基于Kinematic定位和柔性去应力相结合的结构。
根据离轴反射系统主镜的受载工况和金属反射镜安装特点,分析了该主镜在重力作用和存在安装应力情况下的镜面变形,结果显示:由重力载荷和安装应力载荷引起的主镜镜面变形RMS值均小于/15(=632.8nm)。目前由于单刃金刚石车削金属反射镜的面形精度在/6(=632.8nm)左右[1-2,5],说明由支撑和安装导致的镜面变形比加工引入的面形误差小得多,说明该金属反射镜结构设计合理,为红外离轴系统中金属反射镜的应用提供了一定的借鉴和参考。
[1] Risse S, Gebhardt A, Damm C, et al. Novel TMA telescope based on ultra precise metal mirrors[C]//, 2008, 7010: 701016( doi: 10.1117/12.789824).
[2] 石磊, 许永森, 刘福贺, 等. 光电系统铍反射镜的发展与应用[J]. 中国光学, 2014, 7(5): 749-758.
[3] 刘群龙, 吴晗平, 张焱, 等. 新型红外光学系统的结构特点与技术分析[J]. 光电技术应用, 2010, 25(2): 29-34.
[4] 史广维, 张新, 张建萍. 无遮拦折反射红外光学系统[J]. 光学精密工程, 2014, 22(8): 1995-2000.
[5] 梁宝雯, 吴晗平, 王华泽. 空间相机离轴三反红外光学系统设计[J]. 红外技术, 2013, 35(4): 217-222.
[6] Risse S, Gebhardt A, Damm C, et al. Development and fabrication of a hyperspectral, mirror based IR-telescope with ultra-precise manufacturing and mounting techniques for a snap-together system assembly[C]//, 2011, 8176: 81761N (doi: 10.1117 /12.898025).
[7] Raymond G O, Werner P, Alex S, et al. Design and fabrication of diamond machined, aspheric mirrors for ground-based, near-IR astronomy[C]//, 2003, 4841: 677-688.
[8] Donald R, Donald B, Richard P, et al. Stabilized high-accuracy optical tracking system(SHOTS)[J]., 2001, 4365: 10-18.
[9] 曹银花, 李林, 王智勇. 非球面金属反射镜在红外热成像系统中的应用研究[J]. 红外技术, 2006, 28(7): 373-377.
[10] 赵文兴, 张舸, 赵汝成, 等. 轻型碳化硅质反射镜坯体的制造工艺[J]. 光学精密工程, 2011, 19(11): 2609-2617.
[11] Yoder P R.[M]. CRC Press, 2006.
[12] Vukobratovich D. Optimum Shapes for Lightweighted Mirrors[C]//, 1982, 332: 419-432.
Design and Analysis of Metal Mirror for Infrared Off-axial System
FAN Lei,ZHAO Yong-zhi,CAO Yu-yan
(,,,130033,)
With the development of numerical control SPDT(single-point diamond turning), more and more metal mirrors were applied to IR system for reducing the cost. Compared to coaxial system, the mirror mounting structure in IR off-axis system was more complex. As a new and effective option, a light-weight metal mirror with kinematic-locating and flexure-mounting structure was provided. Firstly, with the manufacture characters of metal parts taken into account, kinds of light-weight structures and mounting forms for metal mirror were introduced. Secondly, the model of a metal mirror with aperture of 316mm for an IR off-axis system was provided. Thirdly, the metal mirror was analyzed in different load cases by FEM and the results satisfied the optical requirements.
off-axis system,metal mirror,flexure mount,Kinematic principle,FEM
TH751,TN216
A
1001-8891(2015)05-0374-06
2014-11-28;
2014-12-18.
范磊(1986-),男,内蒙古凉城人,博士,助理研究员,主要研究方向为精密光机结构设计与仿真分析。E-mail:fanlei1995@sina.com。
猜你喜欢
新能源科技(2022年9期)2022-11-20
航天返回与遥感(2022年3期)2022-07-07
光电工程(2020年9期)2020-09-29
环境技术(2020年1期)2020-03-06
航天返回与遥感(2018年2期)2018-05-17
中国光学(2017年4期)2017-08-01
光学精密工程(2016年11期)2016-12-19
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
光学精密工程(2016年7期)2016-08-23
