
地震灾区中地面三维激光扫描测绘技术的应用方法分析
2015-03-29 06:33汪燕麟殷义程
测绘通报 2015年6期
汪燕麟,殷义程,施 昆
(1.云南省测绘工程院,云南 昆明650033;2.昆明理工大学,云南 昆明650033)
一、引 言
近年来,云南地质自然灾害频发,如2007年6月3日 普洱市6.4级地震、2009年6月30日 姚安县6.0级地震、2011年盈江县5.8级地震、2014年8月3日鲁甸县6.5级地震等。云南山高谷深,属于滑坡、泥石流等地质灾害多发区域,每次震后都有次生灾害发生,造成了人员伤亡和财产损失。国内通常是在震后应用三维激光扫描测量技术服务于灾区遗址恢复重建、变化监测等工作。但是在灾害发生后,如何在第一时间获取数据,开展测绘应急保障从而快速指导展开抗震救灾工作是首要任务。本文以三维激光扫描技术在云南鲁甸“8.03”地震灾区中应急测绘保障中的应用为例,简述了如何将该技术在震后第一时间服务于灾区,对灾区大型滑坡区域进行三维重建,精确测量其面积、体积等数据,并对其过程处理要点和方法进行介绍分析。
二、扫描测量数据采集
1.仪器简介
本次鲁甸红石岩堰塞湖滑坡体测量作业采用奥地利生产的Riegl VZ-1000三维激光扫描仪(如图1所示),此设备属于固定式激光扫描系统,外形类似于全站仪,由1个激光扫描仪集成1个外置的数码相机和配套软件控制系统。该设备主要技术指标:测距范围:1400 m,一级安全激光;激光发射频率:300 000点/s;扫描精度:5 mm(100 m距离处,一次单点扫描);扫描角度范围:垂直扫描(线扫描)100°(+60°,-40°),水平扫描(面扫描)0°~360°。

图1 Riegl VZ-1000
2.外业数据扫描
通过车载、乘坐冲锋舟、步行等方式到达震中区域红石岩堰塞湖的主体位置之后,针对测量目标任务和要扫描的滑坡体立面,结合实际,选择合理的控制点确定扫描的站数和位置。选点时需注意:第一,要确保两点之间尽可能通视,有一定的公共区域;第二,选择地理位置较高、视野广阔的点,这样获取的数据也就更多。本次重点选择在堰塞体主体等地方设置7个站点,以确保没有扫描盲区。在选定的观测点上架设好仪器,量取并记录仪器高,打开内置GPS实时定位,连接笔记本电脑操控扫描;设置好仪器工作模式,以垂直方向最大60°、水平360°进行全景扫描,水平方向点与点间隔设为5 mm,扫描时间为每站6~17 min,点云分辨率最远1495 m处为60 cm且排列整齐,满足任何地形测量要求。待每站扫描结束后,利用GPS RTK获取每一个控制点的绝对坐标值。仪器外置的全画幅单反摄影测量相机可同步360°拍摄7张彩色照片,并能在仪器配套RISCAN PRO软件中将彩色照片的信息校准后赋予点云,点云数据即可将真实的环境模拟出来,如图2所示。

图2 彩色激光点云数据
三、数据处理
要对滑坡体地形进行分析研究,需利用扫描仪匹配RISCAN PRO软件进行数据预处理。将三维激光扫描仪获取的数据进行站点融合、测站平差、点云赋色、删除杂点数据、矢量化处理、建立平面、删除冗余点数据、建立三角网模型等步骤得到三维模型。其中删除杂点数据会将树木、房屋等地物去除,显示出滑坡体的真实地形状态,并可用该数据作后续分析研究。
1.数据拼接
本次作业总共设置7个站点,每站扫描平均花费时间14 min,获取点云总数超过1.3亿个,完全满足观测需要。通过点云后处理软件,同步实现了7个站点云数据的全球坐标系转换拼接,快速简便且精度可靠。用软件特有的多站点调整功能,实现站与站之间的精细配准,拼接精度为4 mm,如图3所示。
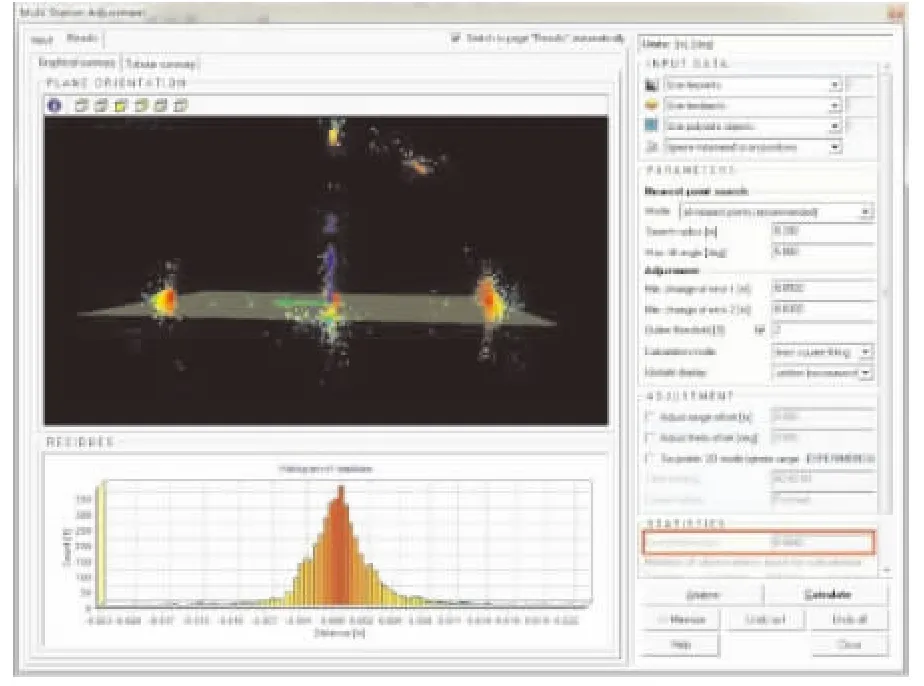
图3 数据拼接
2.过滤噪点
完成点云的拼接工作后,便需对拼接后的点云数据进行噪声点剔除。由于扫描仪在复杂环境中使用,尤其现场工作时,受工程机械的运动,树木、建筑物遮挡,人员的走动,扫描目标本身反射特性的不均匀等因素影响,将会造成扫描获取的点云数据的不稳定性和噪声点,导致点云含有粗差,只有把这些错误的点云剔除后,才可以继续进行其他的操作。在红石岩堰塞体现场扫描中,因为有部队工程机械正在挖掘排洪沟渠,所以必须去除这些噪声数据。点云的去噪是一个重要的过程,扫描过程可计算点云数据的平均距离,得到一个中值,再分别估算数据中单个点与中值的偏差来决定是否留用。
3.剔除植被
使用独特多回波功能,激光可以更多地穿透植被,获取更多的地面点数据,处理软件对多回波数据可以实现一键过滤植被的功能,使得内业处理更加简单高效,如图4所示。
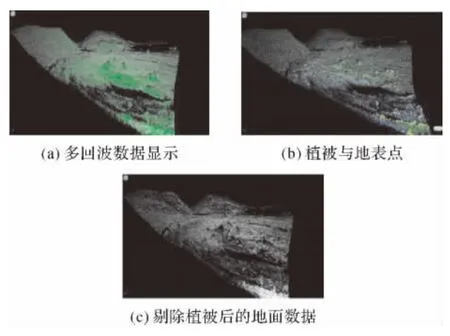
图4
4.滑坡区三维建模
在需要建立模型的点云数据下面建立以似大地面为参考面的平面,生成三角网,并作为最初的点云表面。生成模拟格网后,还需要对这个模拟格网作进一步的处理,不断地删除构建的多余四面体及不属于实体表面部分的格网,删除不相容的三角形,贴图纹理网格,照片与网格结合,生成逼真的现场3D模型图(如图5所示)。
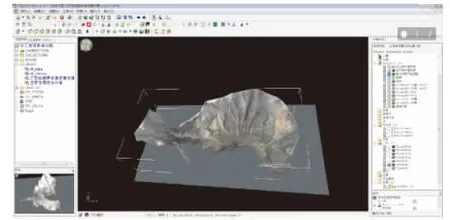
图5 滑坡体三维模型
5.滑坡体测量
(1)高度量测
在测量一个物体尺寸信息的时候,一般主要采用皮尺、测距仪等野外实测,其误差较大,并且对于不具备观测条件的大型滑坡体,传统测量更是难以展开。点云数据是实物的三维真实展示,在其中不仅能克服无法实测的难题,并且还能快速、准确地进行点到点、点到面、面到面的长、宽等尺寸的精确量测。通过量测,堰塞湖坝体高度121 m(水面以上高度54 m),水位较震前上涨了63 m。
(2)体积量测
一般常见的计算土石方量的方法有方格网法、直接测量法、平均高程法、断面法等。对于大型滑坡体有时只能进行简单的目测估算,其误差较大。运用RISCAN PRO数据处理软件进行滑坡体积测量,首先要确定测量区域范围。在滑坡体积测量中只有通过比较两次或多次扫描数据,从而分析和确定滑坡区域并对滑坡区域进行检测,确定滑坡范围。在此次应用中,和震前1∶10 000 DEM数据进行融合比对,以前期未滑坡模型为基准对象,以后期滑坡模型为参考对象。在对点云数据进行去噪处理后,前后两期滑坡体模型叠加,在其数据下面建立一个以前期水位淹没线为基础的公共投影平面,可以确定滑坡区域范围(如图6、图7所示)。通过RISCAN PRO软件自带的体积统计模块对要计算的点云进行土方量自动量算,一般而言对于大范围地质体测量,建议栅格值设置为0.5 m,此时效果最理想,得出滑坡体面积为115.6万m2,体积超过1250万m3。
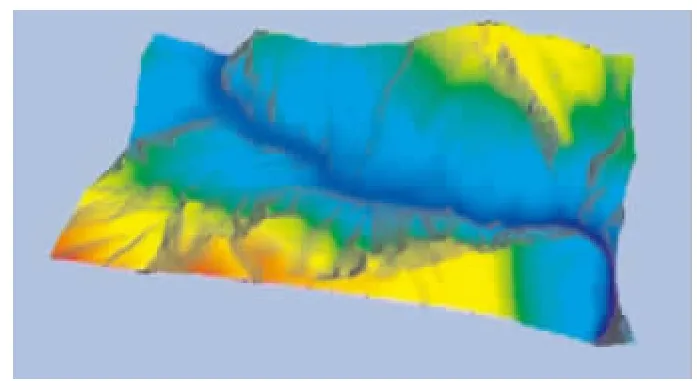
图6 堰塞湖地震前1∶10 000 DEM模型
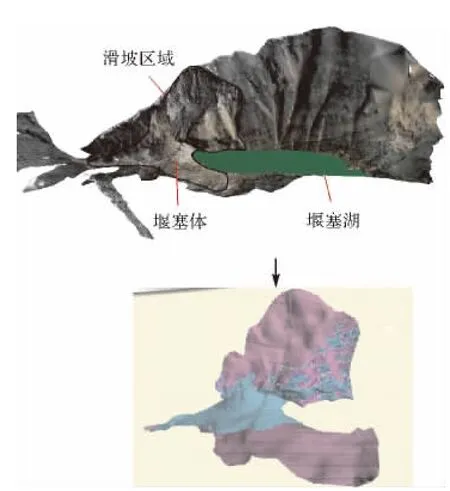
图7 滑坡区域范围
在数据采集过程中,结合扫描仪上的GPS定位系统,对特征点(如房屋拐点、道路岔路口等)进行定位测量,通过基准点进行大地坐标转换,实现前后两个DEM模型的坐标统一。控制点共5个,坐标点转换精度分析见表1。
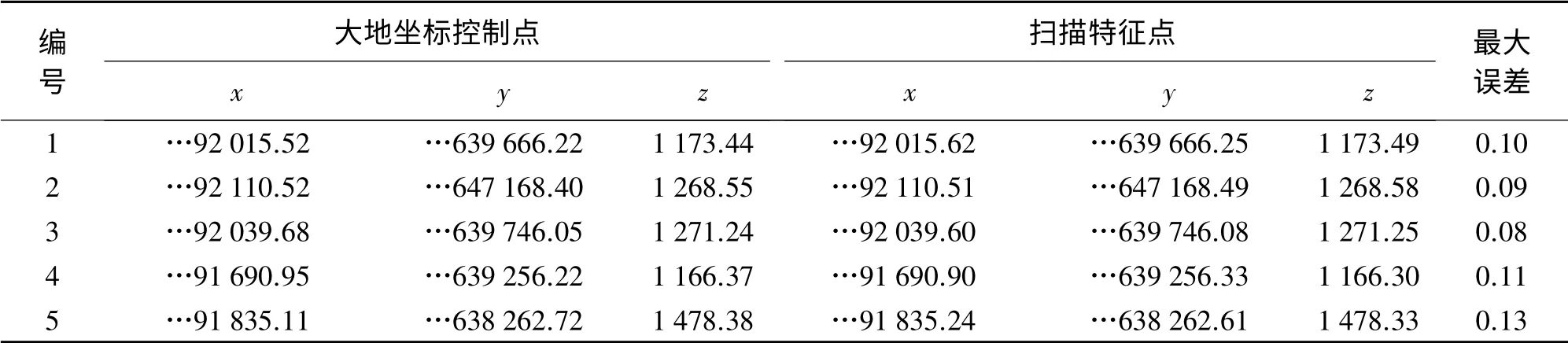
表1 控制坐标转换精度 m
由表1中可以看出,x、y、z坐标误差最大值为0.13 m,经分析产生原因主要包括以下4个方面:
1)点云采样间距误差和测量控制系统本身误差。
2)多幅点云数据拼接误差,扫描仪本身不设置标靶。
3)坐标控制点在点云数据中识别误差,与操作人员选择相关。
4)原有控制质量误差,因原有1∶10 000 DEM是航测制作,数据测量方法不一致,精度要求不一致。
6.二维图制作
通过软件色差分析模块,可以从图中看出滑坡体的滑坡情况(如图8所示),此外,成图软件还可制作各个滑坡地区的平面图、截面图、立面图等二维图形(如图9所示),从不同角度显示滑坡的当前状态,给其他部门提供了直观可靠的图形数据,在分析研究时不仅能够从整体把握滑坡的大致趋势,还能够从细节入手,对具体问题进行具体分析。
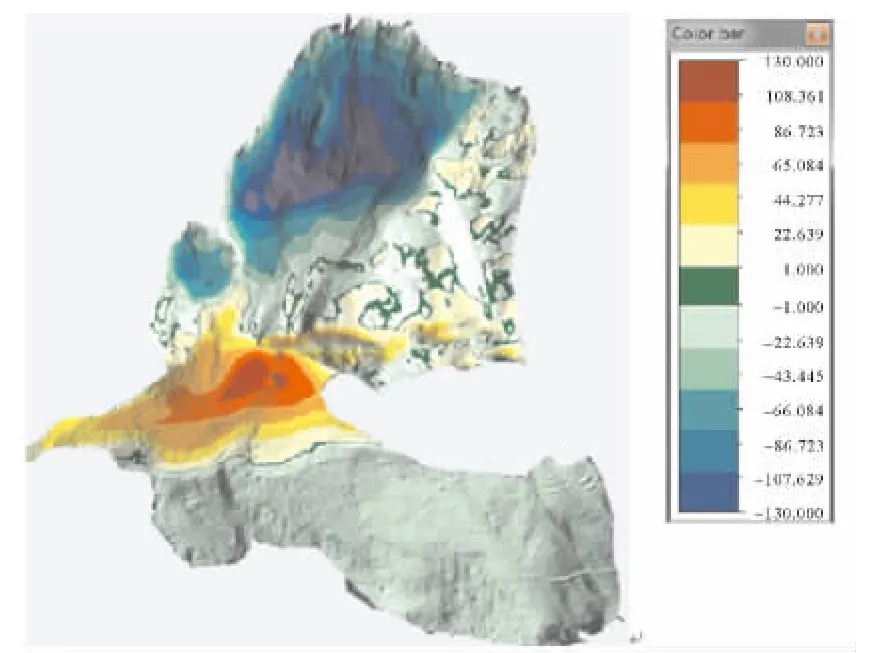
图8 滑坡区域变化分布图
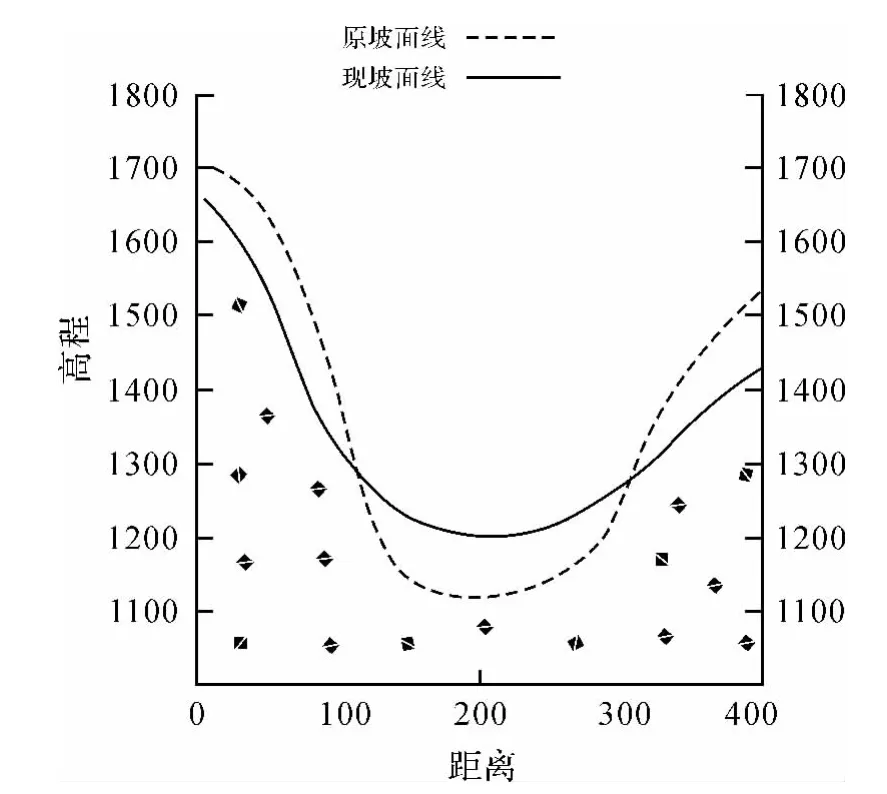
图9 滑坡体中心截面图
四、成果分析
经过在鲁甸地震灾区堰塞湖滑坡体激光扫描测量作业,得到了准确翔实的高精度点云数据,逼真地还原了其立体形状,达到非常好的效果。在计算滑坡土方量时,虽然用的是地震前航测1∶10 000 DEM作模型比对,因测量方式不一致,精度有限,但是地震属于突发自然灾害,在这种情况下,精度测量不是第一位的。第一位的是快速获取灾害现场数据,协助现场救援工作。采用三维激光扫描测量来快速测量滑坡体并建立三维模型来获取灾情数据,可以满足任务要求。
五、结 论
通过这次在抗震救灾中的实例应用可以看出,将三维激光扫描技术应用于滑坡灾害工程中是可行的,结论如下:
1)三维激光扫描技术不仅具有快捷、方便、准确、动态、实时、全数字化、高精度、测量方式灵活、非接触测量等特点,还可利用扫描采集的数据对地质灾害进行研究,为滑坡灾害的防护提供宝贵的研究资料。
2)地面三维激光扫描技术的测量方式和数据结构完全不同于传统的测量手段,其数据处理也完全不同于已有的理论方法,获取数据的特点和方式弥补了传统测量方法的弊端。
3)三维激光扫描技术的优点已经逐渐体现出来,特别是对于测绘领域来说,随着该技术的不断完善和发展、三维信息需求的增加,以及三维空间技术和现代测量技术的深度融合,作为新的空间数据采集手段,相信该技术将会成为一种在测绘领域普遍应用的新技术手段。
[1] 宋宏.地面三维激光扫描测量技术及其应用分析[J].测绘技术装备,2008,10(2):40-43.
[2] 徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010,31(7):2189-2191.
[3] 黄姗,薛勇,蒋涛.三维激光扫描技术在地质滑坡中的应用[J].测绘通报,2012(1):100-101.
[4] 罗德安,朱光,陆立,等.基于3维激光影像扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.
[5] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005.
[6] 董秀军.三维激光扫描技术及其工程应用研究[D].成都:成都理工大学,2007.
[7] 魏小佳,黄润秋,裴向军,等.三维激光技术在高陡危岩体调查中的应用[J].工程勘察,2011(3):57-62.
[8] 梁爽.三维激光扫描技术在煤矸石山难及区域测绘中的应用[J].勘察科学技术,2011(3):44-47.
[9] 宿渊源,张景发.三维激光扫描技术在震后地面三维重建中的应用[C]∥地壳构造与地壳应力文集.北京:地震出版社,2012:30-36.
[10] 蔡润彬,潘国荣.三维激光扫描多视点云并拼新方法[J].同济大学学报:自然科学版,2006,34(7):913-918.
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
陕西水利(2021年8期)2021-09-15
河北地质(2021年1期)2021-07-21
模具制造(2019年3期)2019-06-06
中国地质灾害与防治学报(2018年3期)2018-07-26
中国公路(2017年18期)2018-01-23
北方交通(2016年12期)2017-01-15
山东青年(2016年3期)2016-02-28
现代营销·经营版(2015年3期)2015-04-20
科技视界(2014年33期)2014-01-02
