三维激光扫描在地铁隧道形变监测中的应用
2015-03-28 06:13:48朱宁宁
测绘工程 2015年5期
朱宁宁
(河南理工大学 矿山空间信息技术国家测绘地理信息局重点实验室,河南 焦作454000)
隧道的形变监测对隧道施工及运营中的安全具有重要意义,现有的监测方法主要是在隧道壁上埋点,利用全站仪、断面仪、收敛仪等[1-3]进行监测,但这些方法不仅费时费力,更重要的是难以实现对隧道的整体、实时、自动监测。随着三维激光扫描仪测量精度的不断提高[4-5],其应用范围逐渐扩展到形变监测领域。在地铁隧道的形变监测中,三维激光扫描获得的点云数据可以将目前基于点的形变监测发展为基于面的形变监测,与现有监测方法相比具有巨大的优势[6-12]。
本文提出以隧道中轴线为基础连续截取断面的方法,并对截取的断面拟合椭圆,将拟合椭圆的长、短半轴分别与隧道设计值进行比较,获得隧道在水平和竖直方向的形变量,对形变量较大的断面进行分析得到变形量较大的点位分布。
1 监测方法
从隧道点云中提取出中轴线,然后沿隧道中轴线等间隔连续截取隧道断面并对截取的断面拟合椭圆,分析拟合出的长、短半轴与设计半径的差异,最后针对差异较大的断面找出形变量较大的点位。
1.1 中轴线提取
针对隧道点云带状分布的特征,提出利用方位角最值搜索算法提取边缘点用于拟合隧道中轴线;如图1(a)、(b)所示,将原始点云投影至水平面(XOY)上并做平面旋转使隧道走向与X轴一致;隧道中轴线可由上、下两条边缘线平均得到,搜索上边缘点时方位角起始方向为Y轴正向,搜索下边缘时方位角的起始方向为Y轴反向;从隧道点云中任选一种子点,设定搜索半径r,计算搜索半径内各点与种子点的方位角,选出方位角最大及最小的搜索点作为下一次搜索的种子点,若以方位角最小为搜索条件表示向右侧搜索,反之,则向左侧搜索,两方向搜索的点集构成一条完整的边缘线;图1(c)、(d)展示了以Y轴正向为方位角起始方向向右侧搜索上边缘点的过程及搜索结果。
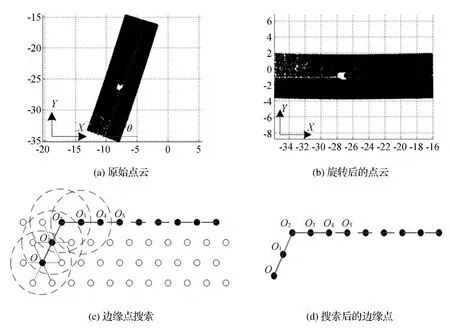
图1 边缘搜索过程
平面坐标的旋转公式为
式中:ϑ为旋转角,可通过隧道两端处的扫描点得到。
将搜索的上、下边缘点集分别记做(XiYiZi)up、(XjYjZj)down,并 采 用 随 机 采 样 一 致 性(RANSAC)[13]算法对其分别拟合二次曲线:

取拟合曲线的均值作为隧道中轴线,即:
1.2 连续截取断面
如图2所示,沿拟合的隧道中轴线等间隔设定分割点,分割点间的距离为d,利用式(3)计算各分割点处的法平面,然后搜索距离各法平面小于d0的扫描点,完成各分割点处断面的连续截取。
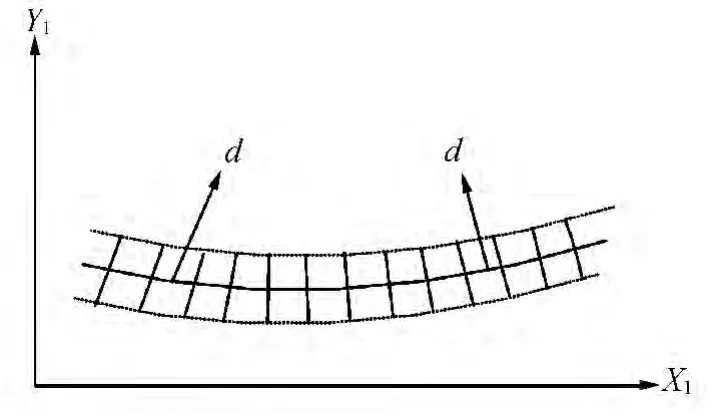
图2 断面截取示意图
通过拟合的隧道中轴线,可以得到任意分割点处的切向量ei(1 yi′zi′),

过分隔点Oixiyizi的法平面可表示为

则距离Oi点切平面不大于d0的点集Φi可表示为

将所选点投影于分割点所在的断面上:

式中,k表示扫描点到断面的距离(包含方向)。

如图3所示,利用Oi(xiyizi)点处的切向量ei(1yi′zi′)对点集Φi再次进行坐标转换,使转换后的X轴平行于ei。在此需进行两次旋转变换,两旋转角分别为α,β。

旋转算式见式(9)。

式中,

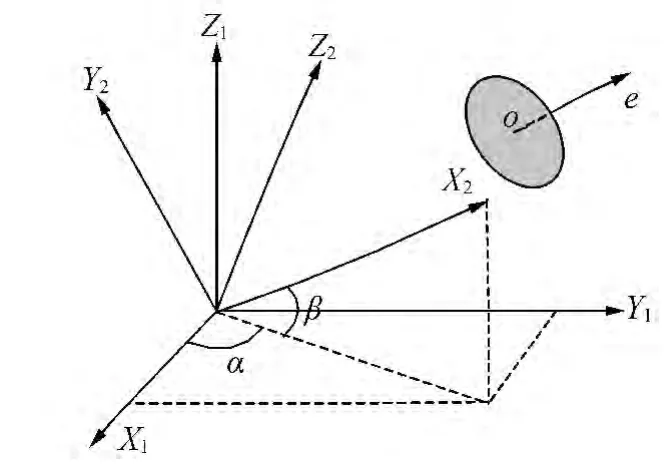
图3 旋转变换示意图
1.3 断面拟合及形变分析
隧道盾构环片作用力下会发生两侧扩张、顶部沉降的形变,由设计时的圆形变为椭圆,在此对截取的断面分别进行椭圆拟合,将拟合出的长、短半轴与设计的圆形半径比较,分别获得隧道断面在水平方向和竖直方向的形变量,最后找出形变量较大的断面中形变量较大的点位。
经转换后的隧道断面平行于YOZ平面,因此椭圆的拟合方程[14]可表示为

式中:a,b分别表示拟合椭圆的长、短半轴;(y0,z0)表示拟合椭圆的中心坐标。
如图4所示,对拟合的a,b与设计半径r差别较大(即Δa,Δb较大)的断面进一步找出变形量较大的点位,以断面内的点到拟合中心的距离与R的差值Δ作为分级指标,点集Ψi表示断面内形变量大于Δ的断面点。

最后将点云转换至原始坐标系:

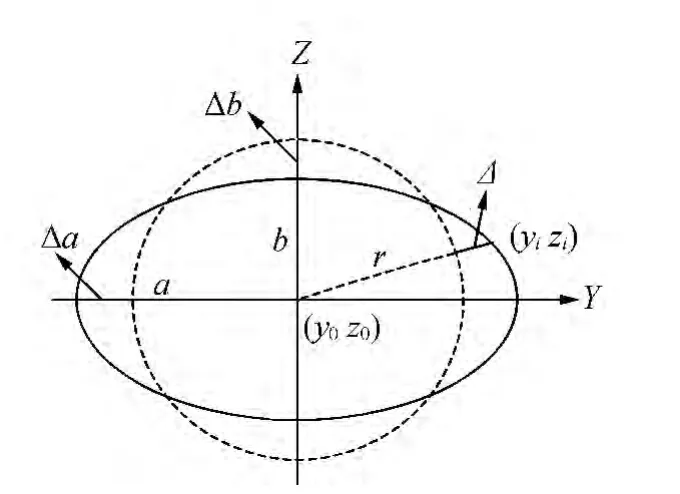
图4 断面分析图
2 实验分析
实验采用Rigel VZ-400三维激光扫描仪在郑州市某地铁站获取的点云数据,通过MATLAB和VC++编程实现整个运算过程[15]。如图5(a)、(b)所示,该段隧道采用盾构法施工,采集数据时处于试运营阶段,截取区域的长度约为20 m,扫描竖直、水平角度分辨率均为0.05°;为排除非隧道壁上的点对断面提取的影响,使用Geomagic软件与手工交互的方法对隧道点云中预制管片的连接螺栓孔、螺帽、注浆孔及电缆、照明设备和其他附着在管壁上的设施做滤波处理,滤波后如图5(c)所示。
将滤波后的隧道点云投影至水平面,利用方位角最值搜索算法搜索的边缘点拟合中轴线。搜索半径r=0.1 m,由式(2)得到的隧道中轴线拟合参数如表1所示,图6(a)、(b)分别为拟合的隧道中轴线在水平面和竖直面内的投影。
实验区地铁盾构环片宽度为1.5 m,在此截取断面之间的间隔d=1.5 m、d0=5 mm,且各断面均位于盾构环片的中间,图7(a)为隧道点云及拟合的中轴线,图7 b为按式(6 沿中轴线截取的隧道连 续断面。

图5 隧道点云

表1 边缘二次曲线拟合参数表
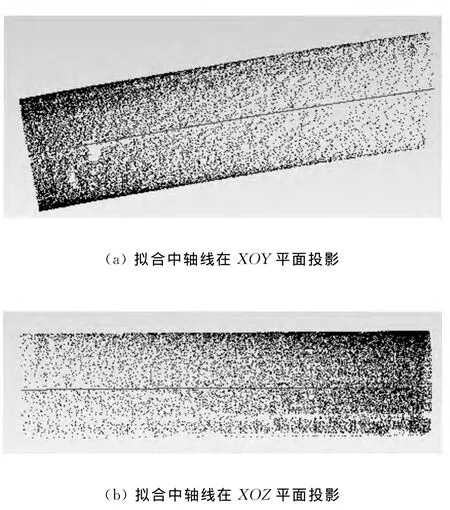
图6 隧道中轴线
对连续截取的12个断面按式(9)进行坐标转换并拟合椭圆,表2为各断面拟合椭圆的长半轴a、短半轴b及其与隧道设计半径R=2.7 m的差值Δa、Δb,图8展示了各断面的轴长变化趋势。
由表2和图8可知,隧道在水平方向的变形表现为向两侧扩张,竖直方向的形变表现为沉降,且竖直方向的形变量除8号断面外均大于10 mm,水平方向的形变量除1号断面外均小于10 mm,各断面在竖直方向的变形量大于水平方向的变形量;由于1号断面和4号断面分别在水平和竖直方向变形量最大,对其进一步分析寻找变形量较大的点位。

图7 断面监测过程

图8 断面形变分析

表2 断面拟合的长、短半轴
图9(a)中的“·”表示1号断面点,“+”表示拟合出的椭圆点,利用式(11)对隧道断面点按不同形变量进行分类,图9(c)为Δ=10 mm时的形变分析图,图中“Δ”表示变形量大于10 mm,“·”表示变形量小于10 mm;图9(e)为Δ=20 mm的形变分析;图9(b)、(d)、(f)为对4号断面的形变分析。上述分析隧道各断面的变形量及变形较大的断面中不同级别点位的分布时将施工误差也视为形变,使用多期数据可得到不含施工误差的形变值,将各期数据转换至同一坐标系,由第一期点云提取隧道中轴线,其后各期数据直接利用第一期数据提取的隧道中轴线在相同位置截取隧道断面,按相同方法对不同时期的断面进行分析即可得到相应时期内的形变量。
3 结 论
针对地铁隧道的形状特征,本文提出利用隧道中轴线截取断面进行形变分析的方法,包括隧道中轴线提取、断面截取和断面分析,并通过实验进行验证,得到如下结论:1)方位角最值搜索算法提取的边缘点可准确拟合出隧道中轴线;2)通过对隧道断面拟合椭圆并与设计值对比,可得到隧道内不同区域的形变情况。此外,研究各站点云的高精度拼接以及高效存储管理方式将是本文下一步工作的重点。
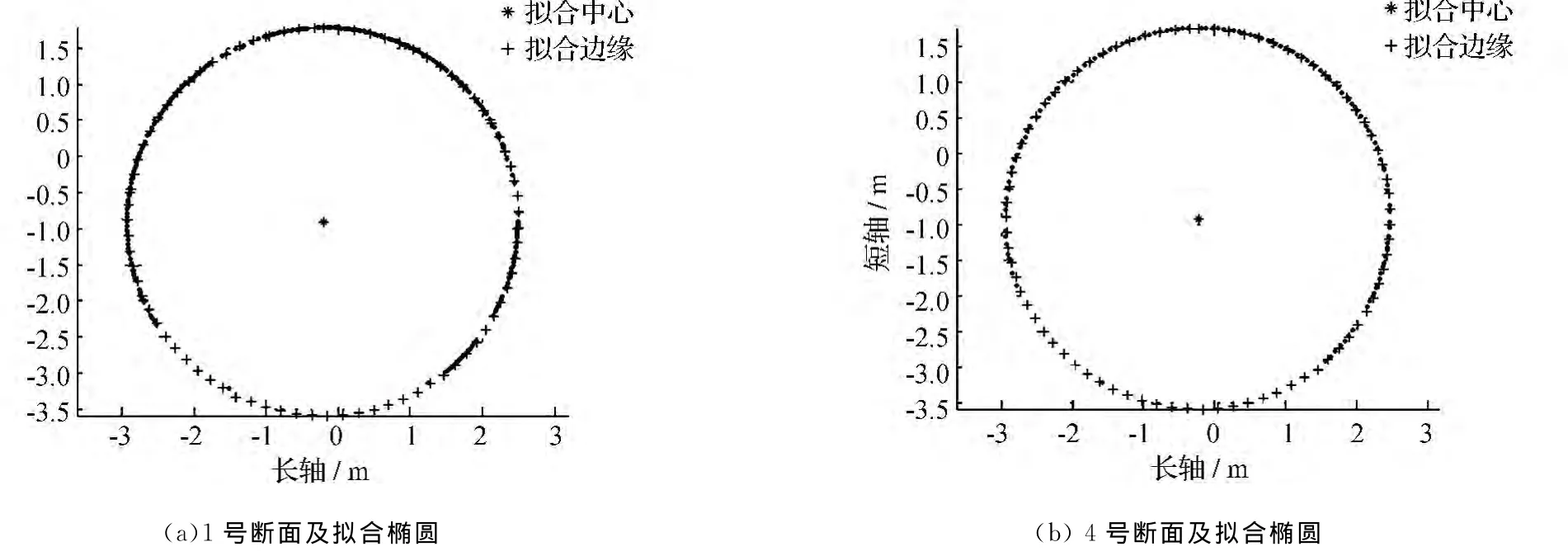
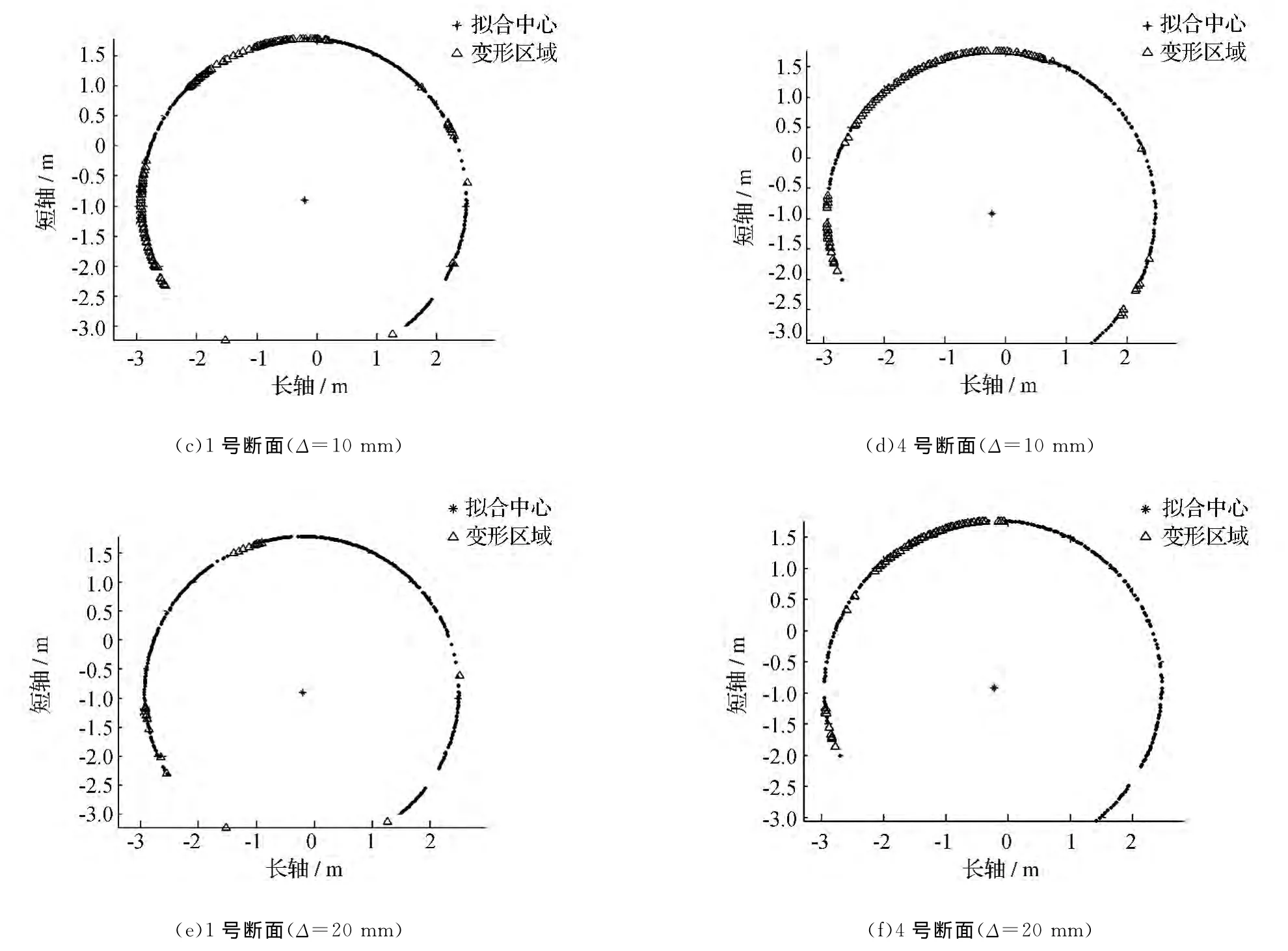
图9 断面形变分析
[1] 曾鼎华,张永兴,阴可,等.三角形量测法在隧道变形监测中的应用研究[J].水文地质工程地质,2005(5):113-115.
[2] 王研.三维激光扫描仪在复杂环境中的应用[J].测绘与空间地理信息,2014,37(1):153-154.
[3] 郑立常,卫建东,郑俊锋,等.基坑施工对临近运营地铁隧道影响监测的实践[J].测绘工程,2007,16(2):47-50.
[4] 曹先革,杨金玲,司海燕,等.地面三维激光扫描点云数据精度影响因素及控制措施[J].测绘工程,2014,23(12):5-7.
[5] 张洪栋,刘翔,时振伟.影响地面三维激光扫描仪数据质量的因素分析[J].测绘与空间地理信息,2014,37(2):183-186.
[6] 邱冬炜,梁青槐,杨松林.北京地铁隧道结构整体变形监测的研究[J].测绘科学,2008(S1):16-17.
[7] 毕俊,冯琰,顾星晔,等.三维激光扫描技术在地铁隧道收敛变形监测中的应用研究[J].测绘科学,2008(S2):14-15.
[8] 夏国芳,王晏民.三维激光扫描技术在隧道横纵断面测量中的应用研究[J].北京建筑工程学院学报,2010(3):21-24.
[9] 邓洪亮,陈凯江,朱明岩,等.隧道监控量测三维激光扫描方法与应用研究[J].测绘通报,2012(S1):123-125.
[10]刘燕萍,程效军,贾东峰.基于三维激光扫描的隧道收敛分析[J].工程勘察,2013(3):74-77.
[11]托雷,康志忠,谢远成,等.利用三维点云数据的地铁隧道断面连续截取方法研究[J].武汉大学学报:信息科学版,2013(2):171-175.
[12]康志忠,托雷,王保前,等.基于三维激光扫描的地铁隧道连续形变监测数据处理软件系统[J].测绘工程,2013,22(5):82-86+96.
[13]FISCHLER M A,BOLLES R C.Random Sample Consensus:a Paradig m for Model Fitting with Applications to Image Analysis and Automated Cartongraphy[J].Co mmunications of the ACM,1981,24(6):381-395.
[14]王解先.工业测量中一种二次曲面的拟合方法[J].武汉大学学报:信息科学版,2007(1):47-50.
[15]龚俊,柯胜男,朱庆,等.一种八叉树和三维R树集成的激光点云数据管理方法[J].测绘学报,2012(4):597-604.
猜你喜欢
童话王国·奇妙逻辑推理(2024年2期)2024-05-22 15:02:33
宁波教育学院学报(2023年6期)2023-12-31 13:22:12
中国收藏(2023年6期)2023-06-08 21:13:31
装备制造技术(2021年4期)2021-08-05 07:39:54
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
电镀与环保(2018年4期)2018-08-20 03:08:04
汽车实用技术(2015年8期)2015-12-26 09:01:06
河南科技(2015年18期)2015-11-25 08:50:14
金属加工(热加工)(2013年11期)2013-06-28 06:27:52