时栅位移传感器网络功能模型研究*
2015-03-26 08:00杨继森江中伟冉扬洁李宏伟
传感器与微系统 2015年3期
杨继森,江中伟,冉扬洁,李宏伟
(重庆理工大学 机械检测技术与装备教育部工程研究中心,重庆400050)
0 引 言
第一代时栅位移传感器根据“TST”原理,研究出第一台时栅位移传感器样机,该样机没有数据传输端口仅仅是对“TST”原理的验证;通过引入“场”的概念,时栅位移传感器课题组成功研制出第二代时栅位移传感器:场式时栅位移传感器[1],第二代代产品主要用串口作为数据传输方式,在设定串行接口的波特为57 600 bps 时,场式时栅位移传感器能够满足数据传输要求。随着时栅位移传感器动态测量技术的提升,提高时栅位移传感器的激励信号频率成为一项关键的技术手段,但是激励源信号频率的增加,在时栅传感器第二代产品中仍然用串行接口作为数据传输方式就不能满足要求。通过德国Heidenhain 圆光栅数据传输方式—增量式接口的启发,在第三代时栅传感器数据传输部分加入了增量式接口。在第四代产品中采用USB 2.0 作为主要的数据传输方式。在激励信号频率为20,40 kHz时,USB 接口最大传输速率为480 Mbps,基本能够满足数据传输要求;但同时存在上位机开发难度大、USB 驱动程序复杂等不足。
本文提出采用网络端口的方式进行数据传输,同时增加其远程初始校验与远程故障诊断功能,将Internet 技术和时栅位移传感器相融合,这种时栅位移传感器模型可有效地进行故障诊断分析,减少客户的故障损失,并可以更好地开展售后服务,促进了时栅位移传感器的产业化发展。
1 uIP 协议分析
uIP 协议是一种使用于低至8 位或16 位微处理器的嵌入式系统的一个可实现的极小的TCP/IP协议栈[2]。本方案采用的是由瑞典计算机科学研究所Adam Dunkels 开发的uIP 1.0,它采用模块化设计,其代码量仅为几千字节,只需要几百字节的内存就可以顺利运行,完全适应目前时栅位移传感器的嵌入式系统,其结构示意图如图1 所示。
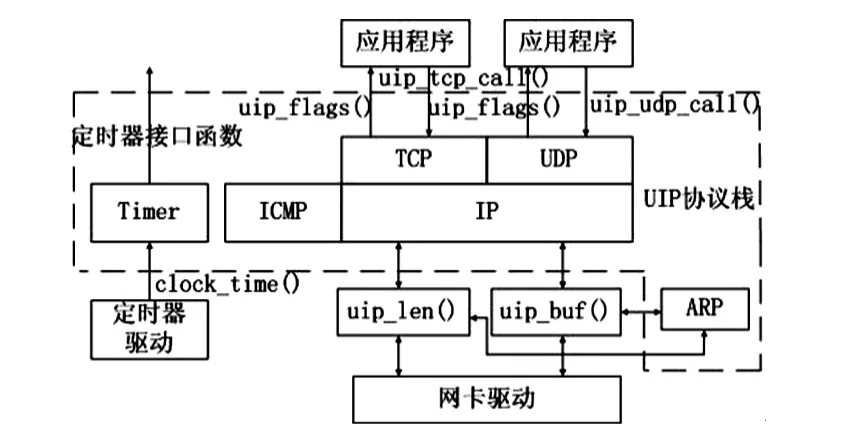
图1 uIP 协议栈结构示意图Fig 1 Structure diagram of uIP protocol stack
由图1 可知,uIP 协议处于网络通信的中间层。需要用户为uIP 协议栈提供专用的定时器驱动程序和网卡驱动程序[3,4],uIP 协议则为底层系统提供了4 个接口函数:uIP_init(),uIP_input(),uIP_periodic()和uIP_udp_periodic()。它们的作用分别是:1)完成uIP 协议栈的初始化;2)处理接收到的ip 数据包;3)协议栈内核周期性地对各tcp 连接的轮询,如果需要调用上层应用程序处理,则调用uIP_tcp_call();4)用于udp 服务下周期性地对各udp 连接的轮询,如果需要调用上层应用程序处理,则调用uIP_udp_call()。其中,uIP_input()和uIP_periodic()在其协议的内部都采用同一个函数void uIP_process(u8_t flag)来实现,只是区别在于调用的参数不同[5]。
2 系统硬件
时栅位移传感器整个电气信号系统包括:励磁信号产生模块、微弱信号调理模块和微控制器模块。整个系统的设计方案是通过网络控制芯片ENC28J60 接入网络,具体结构如图2 所示。
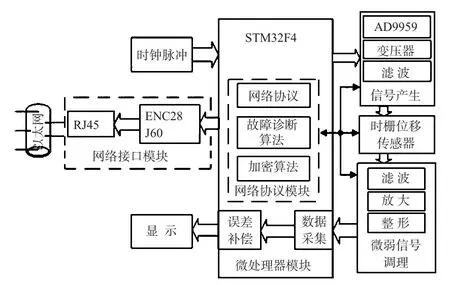
图2 系统硬件框图Fig 2 Hardware block diagram of system
2.1 信号系统模块
时栅位移传感器嵌入式信号系统模块包括:微处理器模块、励磁信号产生模块和弱信号调理模块。微处理器模块主要控制AD9959 产生三相励磁信号和完成时栅位移传感器感应信号的后处理(包括信号采集、误差补偿、信号转换)[6];时栅位移传感器的结构类似三相电机,当时栅位移传感器引入三相激励信号后,根据电磁原理,则会在时栅位移传感器内部的定、转子气隙间形成一个磁行波,那么,传感器测头就会感应出感应信号。由于感应信号较弱就需要微弱信号调理模块对感应信号进行调理(包括滤波、放大和整形)[7]。
2.2 网络接口模块
网络接口芯片选用ENC28J60(Microchip 公司),它可作为任何配有SPI 的控制器的以太网接口,它是全球目前最小封装的以太网控制器,且符合IEEE 802.3 的全部规范,支持一个带自动极性检测和校正的10BASE—T 端和支持全双工和半双工模式;8 kB 发送/接收数据包双端口SRAM,可配置发送/接收缓冲器大小。同时还提供了一个内部DMA 以实现快速数据吞吐和硬件支持的IP 校验和计算。与主控制器的通信通过两个中断引脚和SPI 实现,数据传输速率高达10 Mb/s[8]。硬件连接图如图3 所示。
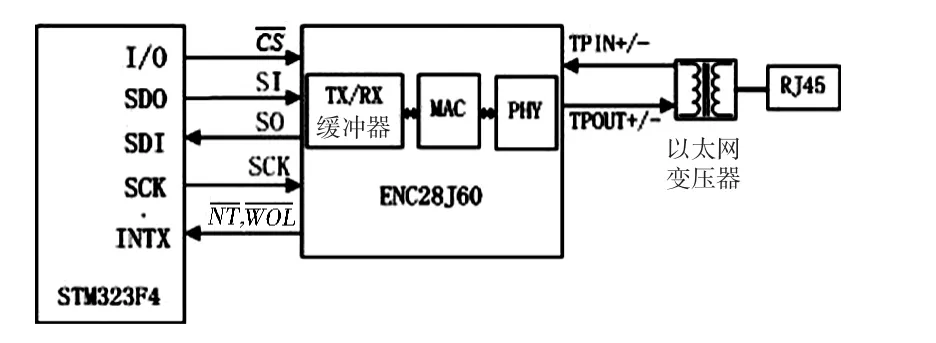
图3 网络控制器连接图Fig 3 Connection diagram of network controller
3 网络功能模型
本方案在原理上将沿袭“以时间测量空间”的思想,在功能结构上提出将uIP 引入时栅位移传感器测量系统配合网络算法,以实现时栅位移传感器的信息化、智能化、网络化;功能上实现时栅位移传感器在线故障诊断、远程初始校验和大数据采集。
3.1 故障诊断和远程校验模型
仪器设备的在线故障诊断功能和远程初始校验功能已被广泛接收和采用,并具有成熟的理论体系。本文提出在时栅位移传感器中增加其在线故障诊断功能和远程校验功能,图4 为时栅传感器远程故障诊断和远程初始校验模型。用户在使用时栅位移传感器时,控制系统通过对采集到的数据进行加密和封装,利用Internet 传送到生产商所在的产品服务器上,通过访问故障特征知识库进行查询故障的来源和故障解决方式,然后再传到用户的时栅位移传感器的控制电气箱,以此达到在线故障诊断和远程校验的目的。
3.2 大数据采集
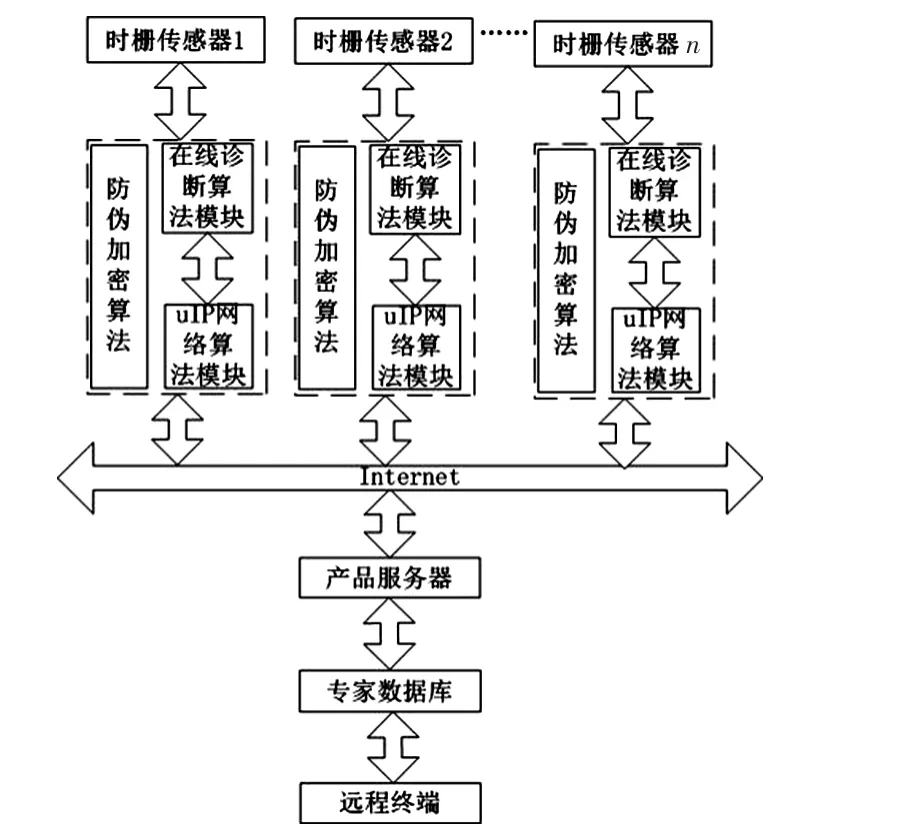
图4 在线故障诊断框图Fig 4 Block diagram of online fault diagnosis
本方案提出时栅位移传感器的大数据采集模型。利用网络协议对采集到的数据进行封装并通过网络接口直接发送给终端的算法模型,从而提高了数据采集的实时性和可靠性,其模型框图如图5 所示。从时栅位移传感器电气系统程序的应用中得到所需要采集的数据,并根据物理网络上的传输需求进行转换;经转换的数据以bits 的形式在物理介质上传输;当数据到达上位机时,设备根据需求解除数据上的控制信息,并按一定的算法进行转换[9~11]。
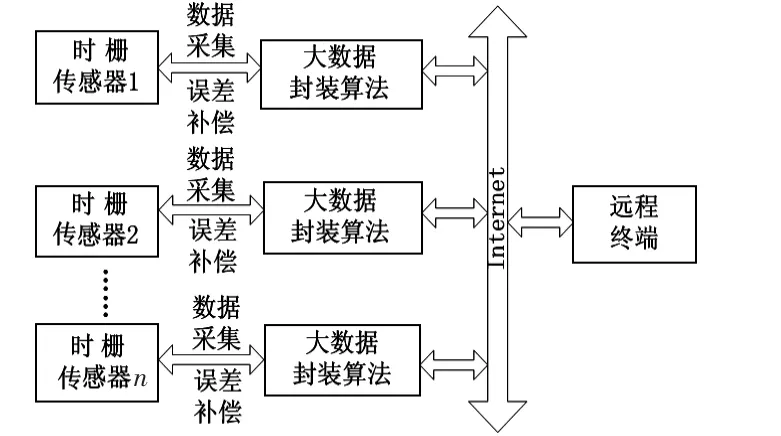
图5 大数据采集框图Fig 5 Block diagram of big data acquisition
4 软件流程
4.1 时栅位移传感器系统诊断流程图
根据时栅位移传感器的结构模型分析,时栅位移传感器最主要的故障可分为三相激励信号电压频率不等,电压幅值不等和转子感应信号电压值异常。一旦出现上述故障后通过加密算法将异常值进行打包,然后通过网络发送到厂家的产品服务器上,通过专家诊断系统进行故障诊断,以及时帮助用户排除故障。图6 所示为时栅位移传感器故障诊断流程图。
4.2 uIP 协议主程序流程
通过调用uIP_init()和enc28j60_init()函数对uIP 协议栈和网络控制器ENC28J60 进行初始化,通过函数uIP_len()是否大于0,判断网络控制器接收的数据,如果大于0则通过函数uIP_input()处理IP 包;当uIP_input()函数返回,若有数据要发送,则发送数据包放在包缓冲区里。包的大小由全局变量uIP_len 指明。如果uIP_len 大于0,则调用网络设备驱动发送数据包[12],其具体流程图如图7 所示。
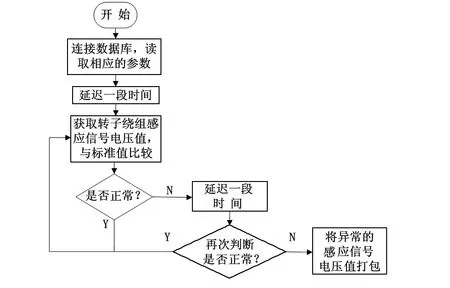
图6 时栅位移传感器故障诊断流程图Fig 6 Fault diagnosis flow chart of time grating displacement sensor
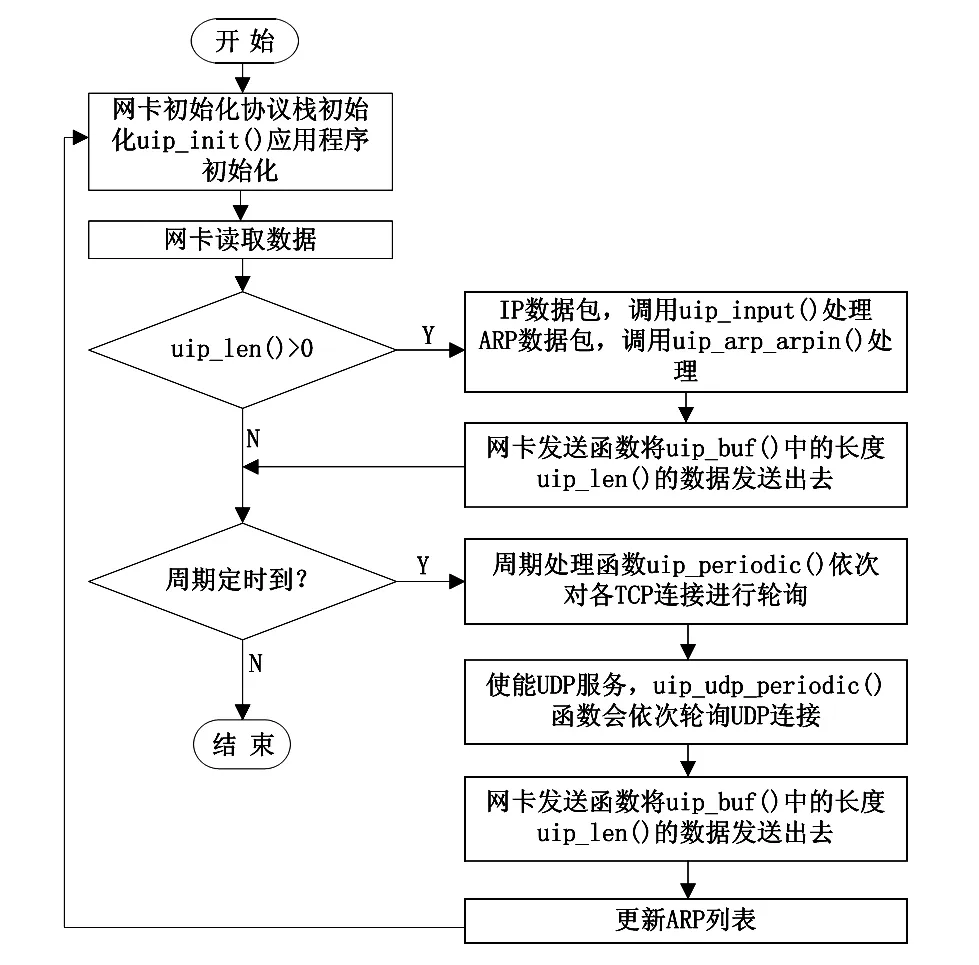
图7 uIP 协议栈流程图Fig 7 Flow chart of uIP protocol stack
5 实验分析
本方案的实验所搭建的实验平台图如8 所示,时栅位移传感器和光栅通过弹性联轴器同轴安装,时栅位移传感器通过电气系统引入激励信号,然后通过上位机软件进行大数据采集和故障分析。根据上述分析,时栅位移传感器的主要故障来源于励磁信号,具体包括三相励磁信号幅值不等、相位不均分、信号短路。因此,通过时栅的电气系统人为的引入故障信号,以提取时栅位移传感器的感应信号。
图9 为输入的时栅激励信号为:短路、幅值不等、相位不均分以及标准信号,所测得的感应信号。
由于时栅感应信号是一个连续的信号,对峰—峰值的提取有一定的困难,因此,将上述的信号进行傅里叶变化,如图10 所示,从而可以有效提取激励信号各种故障的幅值信号,有效地判断故障的来源。
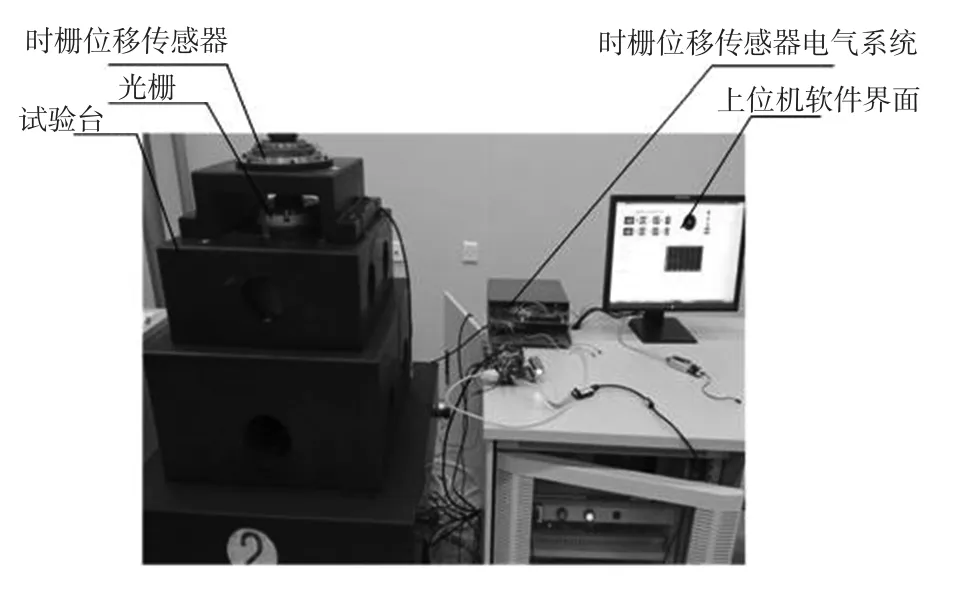
图8 时栅系统实验装置Fig 8 Experimental apparatus of time grating system
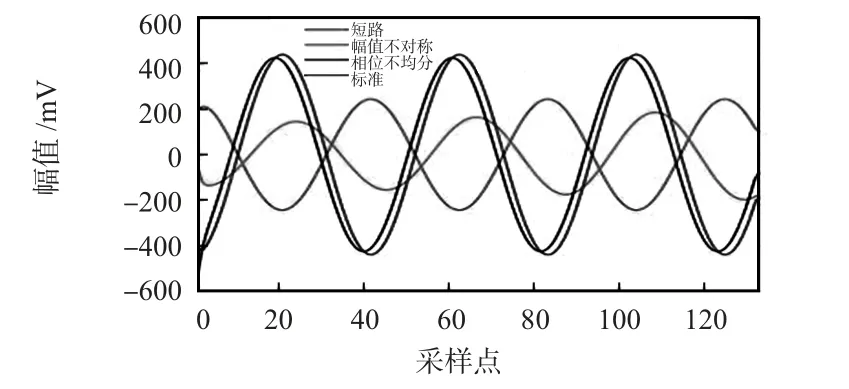
图9 时栅位移传感器感应信号Fig 9 Induced signals of time grating displacement sensor
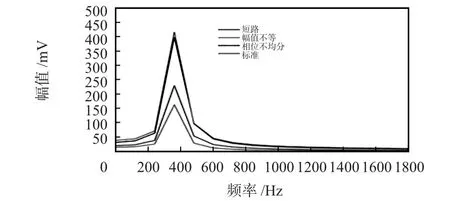
图10 时栅位移传感器感应信号幅度谱Fig 10 Induced signals amplitude spectrum of time grating displacement sensor
6 结束语
本文将uIP 协议栈同时栅位移传感器嵌入式信号系统相结合,并选取合适的网卡控制器,进而到达了将时栅位移传感器接入Internet 的目的。同时,论证了该方案在功能上实现时栅位移传感器的在线故障诊断、远程初始校验和大数据的采集功能的可行性,并给出了一定的硬件框图和软件流程,对时栅位移传感器提升产品竞争力和产业化发展具有重要意义。
[1] 彭东林,张兴红,刘小康.基于时空转换的精密位移测量新方法与传统方法的比较[J].仪器仪表学报,2006,27(4):423-426.
[2] 伊文斌,周贤娟,鄢化彪,等.uIP TCP/IP 协议分析及其在嵌入式系统中的应用[J].计算机技术与发展,2007,17(9):240-243.
[3] 王 琳.基于GPRS 的无线图像数据传输[J].计算机工程,2008,34(13):232-233.
[4] 杜宝祯,吴志荣,曾 佳.基于uIP 与AJAX 的动态Web 服务器设计[J].单片机与嵌入式系统,2012(10):19-21.
[5] Adam Dunkels.The uIP embeded TCP/IP stack[EB/OL].[2012—05—12].http:∥www.sics.se/~adam/uIP.
[6] 杨继森,江中伟,许 强,等.基于AD9959 与STM32 F4 的时栅位移传感器电气系统设计[J].传感技术学报,2013(8):1050-1054.
[7] 郑方燕,王宝珠.基于SOPC 的时栅位移传感器信号处理系统设计[J].传感技术学报,2012,25(10):1429-1432.
[8] 蒋 峰,朱俊杰.嵌入式网络温度测控系统[J].仪表技术与传感器,2007(9):29-30,43.
[9] 何学明,陈学东,曾理湛,等.超精密气浮平台的定位精度分析[J].华中科技大学学报:自然科学版,2008,36(3):8-11.
[10]马 岩,白雪峰,郝 鑫,等.基于神经网络的划片机光栅传感器补偿方法[J].仪表技术与传感器,2013(6):121-123,127.
[11]Li Keqin.Downlink data transmission scheduling algorithms in wireless networks[J].Simulation Modelling Practice and Theory,2011,19(6):1427-1444.
[12]岳世为,尹为民.uIP 协议栈在基于DSP 以太网通信系统中的应用[J].计算机与数字工程,2010,38(1):186-189.
猜你喜欢
军事文摘(2022年20期)2023-01-10
一重技术(2021年5期)2022-01-18
英语文摘(2021年11期)2021-12-31
学生天地(2018年19期)2018-09-07
电子制作(2018年10期)2018-08-04
中国铸造装备与技术(2017年6期)2018-01-22
网络安全和信息化(2016年9期)2016-11-26
网络安全和信息化(2016年11期)2016-11-26
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
创新科技(2014年14期)2014-07-27