
单矢量水听器对海面目标高分辨定位方法研究*
2015-03-26 07:59李楠松朴胜春邢传玺
传感器与微系统 2015年2期
李楠松,朴胜春,邢传玺
(1.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨150001;2.哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨150001)
0 引 言
对水面目标的被动定位在军事和民用上具有非常重要的意义,一直是水声学研究的热点和难点[1,2]。传统的被动定位方法可分为基于信号到达各阵元时延的定位和基于声传播模型匹配的定位,其代表分别为三元阵定位和匹配场定位[3]。匹配场定位多数采用垂直阵,以获得足够多的声场空间信息。就垂直阵而言,由于海洋风浪的存在,导致了阵列倾斜、上下阵元深度以及阵元间隔失配等影响,对声源的准确定位是困难的[4]。
矢量水听器可以同时、共点地测量声场中该处的声压和三个方向上的振速,具有体积小、自然指向性与频率无关,且不需要传统阵列处理中需要对阵列进行校准等特点[5,6]。单矢量水听器本身具有阵列的一些特点,使得将阵列处理中经常用的高分辨算法应用于单矢量水听器对水面目标定位成为可能。高分辨算法是建立在基于空间分布阵列模型的基础之上,根据单矢量水听器上述特点,将阵列信号处理中常用的高分辨算法应用于单矢量水听器,使其拥有以往只有阵列信号处理才能得到的高分辨能力[7]。
本文充分考虑浅海信道对声传播的影响机制,将阵列处理中常用到的高分辨算法与声传播模型匹配的方法相结合,根据高分辨算法构造模型匹配的代价函数,以提高对失配问题的适应性和稳健性,为该方法走向实际工程应用奠定了基础。
1 矢量水听器结构与简正波接收模型
图1 为矢量水听器结构。敏感元件位于球型壳体内,声波不直接作用于敏感元件上,而是作用在壳体上使壳体做振荡运动,敏感元件在惯性力的作用下发生形变,将产生的振动转换为电信号,实现声—电转换,完成声压和振速信号的接收[8]。

图1 矢量水听器结构Fig 1 Structure of vector hydrophone
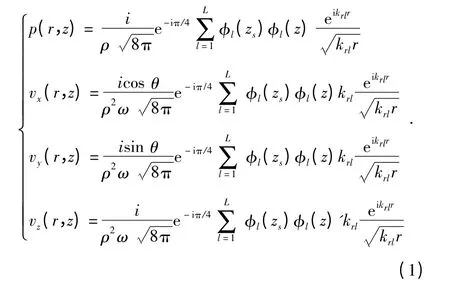
根据简正波理论,略去时间因子,在柱坐标系中,简谐声源激发的声压p,水平振速的两个分量vx,vy和垂直振速vz分别为
2 高分辨空间谱估计方法
本文通过单矢量水听器对水面目标进行定位的原理是:利用高分辨算法构造代价函数对目标的距离和角度进行搜索,通过比较信号在接收水听器上的协方差矩阵R 与假定声源位置后按传播模型数值计算得到的协方差矩阵D之间的相关程度来确定声源的位置。常见的空间谱估计方法有:
常规波束形成(conventional beamforming)法,其谱估计公式为

最小方差信号无畸变响应(minimum variance distortionless response,MVDR)法,其谱估计公式为

特征子空间(multiple signal classification)法,其谱公式为

其中,Un为噪声子空间。
3 单矢量水听器目标定位仿真分析
仿真条件为海水深度35 m,海水声速是1517 ~1500 m/s的负梯度。沉积层厚度3 m,沉积层声速为1 580~1 600 m/s的正梯度,密度1.6 g/cm3,吸收系数0.01 dB/m。基底声速1700 m/s,密度2 g/cm3,吸收系数0.02 dB/m,声源入水深度5 m。矢量水听器位于海底,声源距矢量水听器潜标的水平距离为1km,角度为60°,声源频率600 Hz。采样频率为6 000 Hz,采样快拍数6000,角度搜索范围为0°~360°,搜索步长为Δθ=0.1°,距离搜索范围为1 ~2000 m,步长为Δr=1 m,共进行100 次Monte-Carlo 实验。
图2 给出不同信噪比下信号位于60°方向时三种方法的方位估计性能曲线。其中,NM-CBF,NM-MVDR,NM-MUSIC 分别为基于简正波模型的常规波束形成,最小方差无畸变响应和多重信号分类算法(下同)。可以看出在信噪比大于5 dB 时,四种方法的估计偏差和标准差均在1°以内,说明在具有一定的信噪比下,四种方法都可以对目标进行准确的方位估计;当信噪比小于-5 dB 时,方位估计偏差和标准差显著增大,不能给出目标准确方向,说明三种方法对信噪比有一定的要求。

图2 不同信噪比单矢量水听器方位估计性能Fig 2 Performance of DOA estimation of single vector hydrophone to different SNR
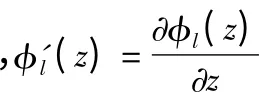
图3 给出不同信噪比下三种方法的距离估计性能曲线。与方位估计曲线相似,单矢量水听器对距离的估计性能随着信噪比的增加而提高,但是对信噪比有更高的要求,在信噪比小于15 dB 时,三种方法不能对目标距离进行准确估计,当信噪比大于15 dB 时,三种方法可以对距离进行有效地估计。
图4~图6 分别为信噪比为20dB 时单矢量水听器利用CBF,MVDR,MUSIC 三种算法构造代价函数对水面目标进行定位的结果。
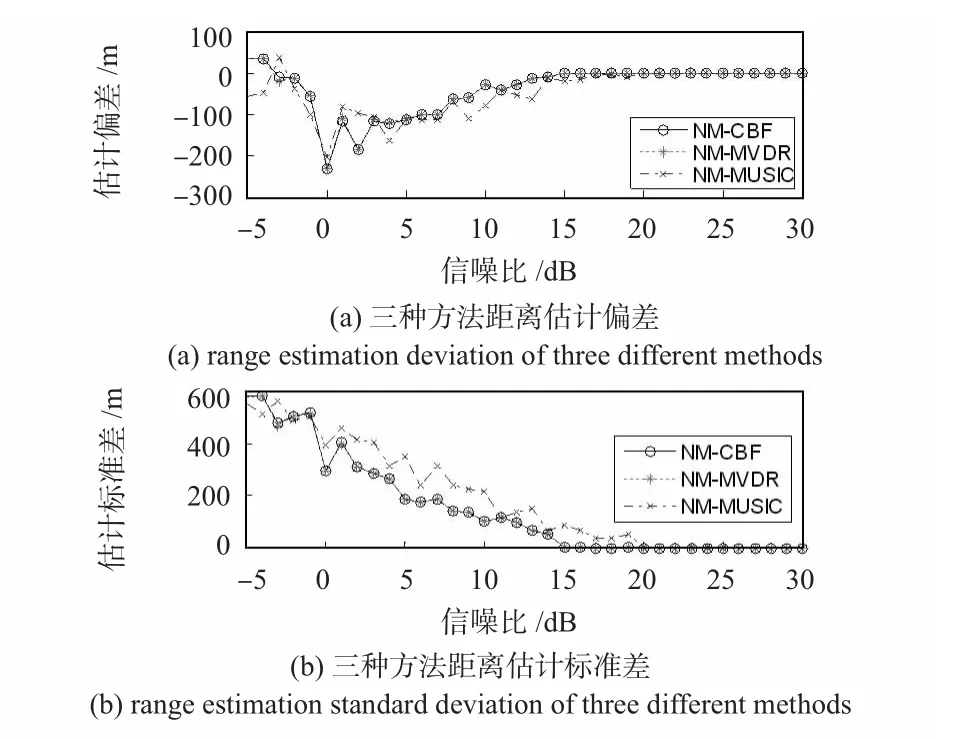
图3 不同信噪下单矢量水听器距离估计性能Fig 3 Performance of range estimation of single vector hydrophone with different SNR
图4 用CBF 算法构造代价函数的方位—距离联合估计结果Fig 4 Result of azimuth-range estimation of cost function constructed by CBF algorithm
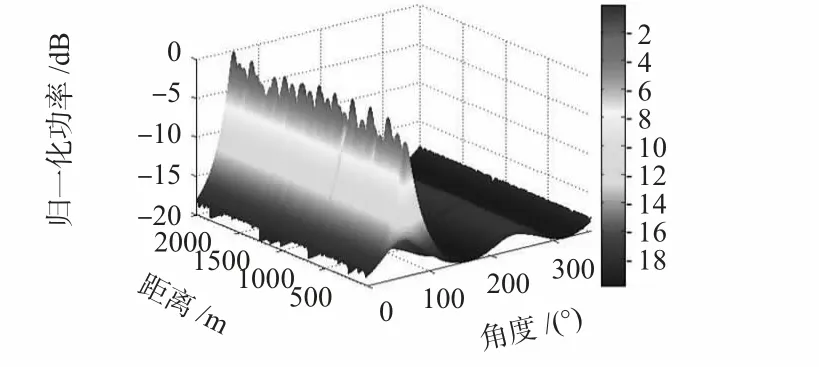
图5 用MVDR 算法构造代价函数的方位—距离联合估计结果Fig 5 Result of azimuth-range estimation of cost function constructed by MVDR algorithm

图6 用MUSIC 算法构造代价函数的方位—距离联合估计结果Fig 6 Result of azimuth-range estimation of cost function constructed by MUSIC algorithm
从中可以看出:1)在目标的方位估计中,三种方法均可以给出正确的方位估计结果,但CBF 方法空间谱主瓣很宽,旁瓣水平很高且背景起伏较大,总体性能很差;MVDR 的性能优于CBF,但是旁瓣水平较高,稳健性容易受到环境失配的影响;MUSIC 算法具有最为尖锐的谱峰和最大的主瓣与旁瓣比,给出了最好的方位估计结果。2)在目标的距离估计中,虽然三种方法在距离投影的最大值均在1 000 m 处,但是CBF 和MVDR 两种方法在距离的空间谱中均没有明显的峰值,而MUSIC 算法可以直观地从图中看出目标声源的位置,拥有更好的距离分辨能力。
4 海试数据分析
为了验证算法的有效性,处理了海上实验数据。实验中,水面声源是频率为300 Hz 的单频信号,采样频率为10 kHz,海深26 m,沉积层厚度约为2 m,目标与矢量潜标距离为3 km,方位角为292°。
图7 和图8 给出了海试结果在角度和距离上的投影。三种算法得到的目标角度均为292°,距离估计结果分别为2 916,3 065,2 917 m,与实际距离很接近。与仿真结果相似,NM-CBF 方法谱峰很宽,性能很差。NM-MVDR 与NM-MUSIC 在角度投影中均有很尖锐的空间谱,距离谱没有角度谱尖锐,MUSIC 算法给出了最好的定位结果。
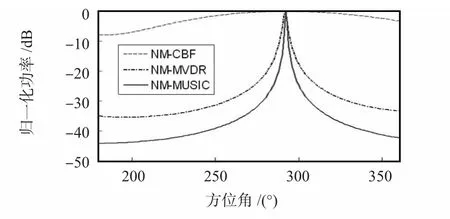
图7 估计结果在角度上的投影Fig 7 Projection of estimation result on azimuth
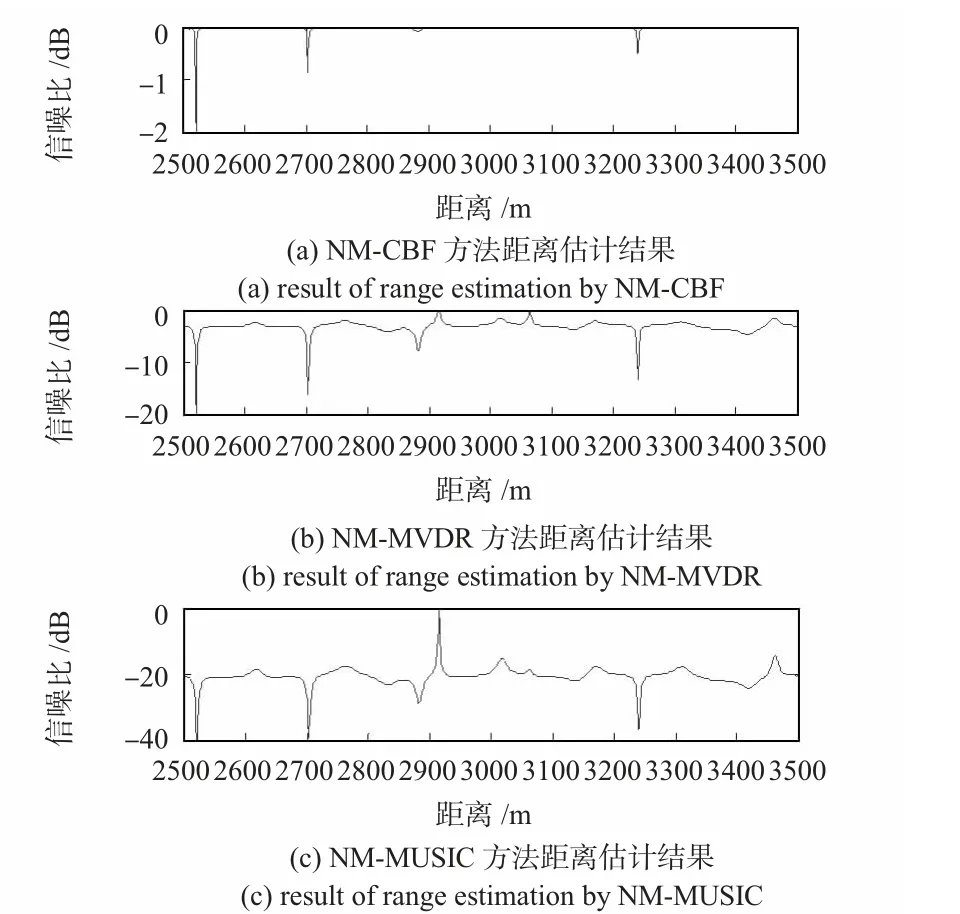
图8 估计结果在距离的投影Fig 8 Projection of estimation result on range
5 结 论
本文将海洋声传播物理模型与空间谱高分辨算法相结合,利用单矢量水听器对海面目标进行高分辨定位。仿真和实验均表明:单矢量水听器可以对海面目标进行被动定位,并且在3 km 范围内,信噪比大于15 dB 时,定位结果误差在5%以下。
[1] 孙贵青,李启虎.声矢量传感器信号处理[J].声学学报,2004,29(6):491-498.
[2] 吴艳群,胡永明,倪 明,等.基于单矢量水听器多途宽带信号的三维定位算法[J].兵工学报,2010,31(9):1181-1187.
[3] 黄益旺.浅海远距离声源定位研究[D].哈尔滨:哈尔滨工程大学,2005:3-4.
[4] Basten,De Bree H E.Multiple incoherent sound source localization using a single vector sensor[C]∥16th International Congress on Sound and Vibration,2009:1869-1876.
[5] 惠俊英,惠 娟.矢量声信号处理基础[M].北京:国防工业出版社,2009:57-60.
[6] 陈丽洁,张 鹏,徐兴烨,等.矢量水听器综述[J].传感器与微系统,2006,25(6):5-8.
[7] 顾晓东,邱志明,袁志勇.单矢量水听器ESPRIT 波达方向估计算法[J].哈尔滨工程大学学报,2009,30(8):867-871.
[8] 贾志富.三维同振球型矢量水听器的特性及其结构设计[J].应用声学,2001,20(4):15-19.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电声技术(2022年3期)2022-04-28
幼儿园(2021年12期)2021-11-06
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
应用科技(2020年1期)2020-06-18
压电与声光(2019年4期)2019-08-29
电子制作(2019年23期)2019-02-23
噪声与振动控制(2016年5期)2016-11-09
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
