
ARUAV对移动辐射源目标的攻击效果仿真分析
2015-03-25 02:35蒋伟航潘英锋
舰船电子对抗 2015年4期
蒋伟航,潘英锋
(空军预警学院, 武汉 430019)
ARUAV对移动辐射源目标的攻击效果仿真分析
蒋伟航,潘英锋
(空军预警学院, 武汉 430019)
现代水面舰艇是世界军事强国争夺制海权的主要武器装备之一,为实现运用反辐射无人机(ARUAV)对其有效攻击和压制,充分应用ARUAV反辐射作战特点,研究ARUAV对移动辐射源的攻击效果显得尤为重要。基于ARUAV末制导及被动导引头测向原理,建立了ARUAV攻击移动目标的仿真模型,探讨了无人机攻击角与攻击精度之间的关系,对ARUAV攻击移动目标的作战研究具有一定的支撑作用。
反辐射无人机;移动辐射源;攻击角;攻击精度
0 引 言
反辐射无人机(ARUAV)是一种新兴的反辐射硬杀伤武器,具有成本低廉、隐蔽性好、使用机动灵活、自主攻击能力强等特点,它的研制为现代战场中直接摧毁辐射源(主要是雷达)开辟了新的途径,美国、以色列、德国和南非等国已先后研制出多种型号的ARUAV[1]。
现代水面舰艇是世界军事强国争夺制海权的主要武器装备之一,而舰载雷达系统的有效运行是其作战效能发挥的重要前提[2]。因此,充分利用ARUAV的反辐射作战特性,研究运用ARUAV对抗水面舰艇具有极大的现实意义。
文献[3]对ARUAV攻击静态辐射源进行了研究,并通过仿真证实无人机对固定目标具有良好的杀伤效果,但对打击移动目标没有探讨。本文基于采用比相体制导引头技术的ARUAV,综合分析其末制导和被动测向原理,结合ARUAV攻击移动辐射源的运动模型,分析不同攻击角条件下无人机对移动目标的攻击精度。
1 ARUAV末制导建模
将ARUAV的末制导过程分为2个阶段:搜索目标阶段和俯冲攻击阶段。为便于分析说明,本文建立了末制导飞行过程的示意图,并对模型中涉及的角度进行了定义,如图1示。其中,垂直面为当前机体运动方向所在的铅垂面。当目标信号被导引头截获时,α为目标方位角,是目标线与天线中轴线在水平面投影的夹角;β为目标俯仰角,是目标线与天线中轴线在垂直面投影的夹角;θKJ为框架角,是天线中轴线与机体中轴线之间的夹角。

图1 无人机末制导示意图
具体过程为:搜索阶段,无人机在巡航过程中通过被动导引头(PRS)搜索辐射源信号脉冲;目标信号一旦被截获并识别,即测量目标辐射源方向与机体轴线的夹角数据,并以此控制机体完成水平姿态和天线指向调整;天线指向同时调整,当框架角大于设定的决策值时,无人机开始俯冲攻击,俯冲时机体在方位和俯仰面上同时调姿,不断向目标逼近直至引爆。
无人机的目标测向数据在每个测向周期ΔT内更新一次,本文将其运动控制过程按照图2所示模型进行设计,考查每次目标测向数据更新后机体姿态的调整变化情况。

图2 机体飞行控制模型
依据图2模型,机体运动过程的算法设计为,设tk时刻无人机坐标为Pk(xk,yk,zk),tk+1时刻无人机坐标为Pk+1(xk+1,yk+1,zk+1),tk时刻测得目标方位角、俯仰角、框架角分别为αk、βk、θKJk。机体采用水平无倾斜转弯,因此,可将无人机在ΔT内的运动先简化分解成横向和纵向上的2个圆周运动,如图3所示,而后进行合成。其中,Δαk、Δβk分别为每次测向数据更新后机体在横向和纵向上需调整的角度。

图3 机体运动的分解示意图
机体的飞行控制和过载密切相关,设机体在横向及纵向上的最大过载分别为n1max、n2max,则ΔT内机体在横向及纵向上能调整的最大角度分别为:
(1)
(2)
式中:V为无人机飞行速度。
机体实际调整角Δαk、Δβk必须依据目标测向信息,并同时满足机体过载能力,所以:
Δαk=min{αk,αmax}
(3)
Δβk=min{βk,βmax}
(4)

根据图3机体坐标系,机体在ΔT内的横向位移为:
(5)
机体在ΔT内的纵向位移为:
(6)
机体的运动轨迹为横向和纵向运动的合成,即:
(7)
2 ARUAV导引头测向模型
2.1 单脉冲比相测向原理
这里ARUAV通过被动雷达导引头(PRS)采用比相测向法测量目标角度信息[6],其原理如图4所示,辐射源信号到达天线Ⅰ和天线Ⅱ的波程差为:
Δr=dsinq
(8)
式中:d为天线Ⅰ、Ⅱ间基线距离;q为来波方向与天线中轴线间夹角。
而波程差Δr对应的相位差为:
(9)
利用式(9)可以确定到达角[7]:
(10)

图4 比相测角原理图
2.2 导引头测向模型
建立天线坐标系,将PRS天线结构简化如图5示,天线阵由3个子天线构成,天线A为坐标原点,B、C分别位于两轴上,坐标分别为(0,d,0)、(0,0,d)。设tk时刻移动目标在天线坐标系中坐标为(xtk,ytk,ztk)。
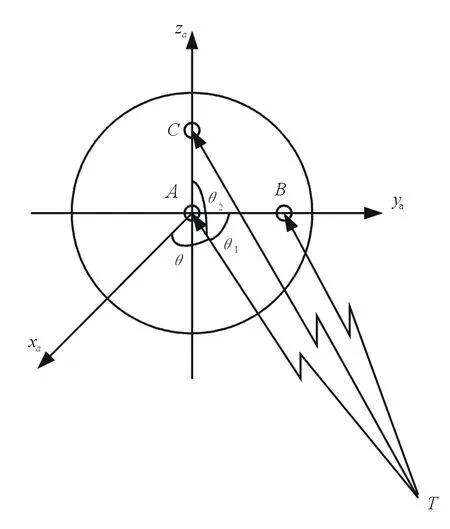
图5 天线结构简化图
子天线A、B进行方位测量,tk时刻相位差为:
子天线A、C进行俯仰测量,tk时刻相位差:
根据式(10)即可分别计算目标线与横向基线夹角θ1与纵向基线夹角θ2。
而目标方向与天线阵视轴之间的夹角:
(13)

α=arctan(cosθ1/cosθ)
(14)
目标俯仰角为:
β=arctan(cosθ2/cosθ)
(15)
3 仿真与分析
根据ARUAV工作过程及原理,仿真程序按照设置参数、解算目标角度、调整天线指向、控制机体姿态的顺序设计。设置参数包括目标辐射源的频率、运动轨迹及速度,ARUAV初始位置、飞行速度、过载系数、基线长度、测向周期、引爆高度等。
仿真条件:移动辐射源位于地理坐标系原点,沿Xi轴正向运动,目标信号频率1.5GHz。ARUAV飞行高度为1 800m,攻击角定义为ARUAV相对目标与目标前进方向之间的夹角φ,如图6所示。ARUAV飞行速度恒定为100 m/s,导引头视场角为60°,天线基线长度为9 cm,测向周期为20 ms,测向误差小于1°,设无人机引爆高小于4 m。
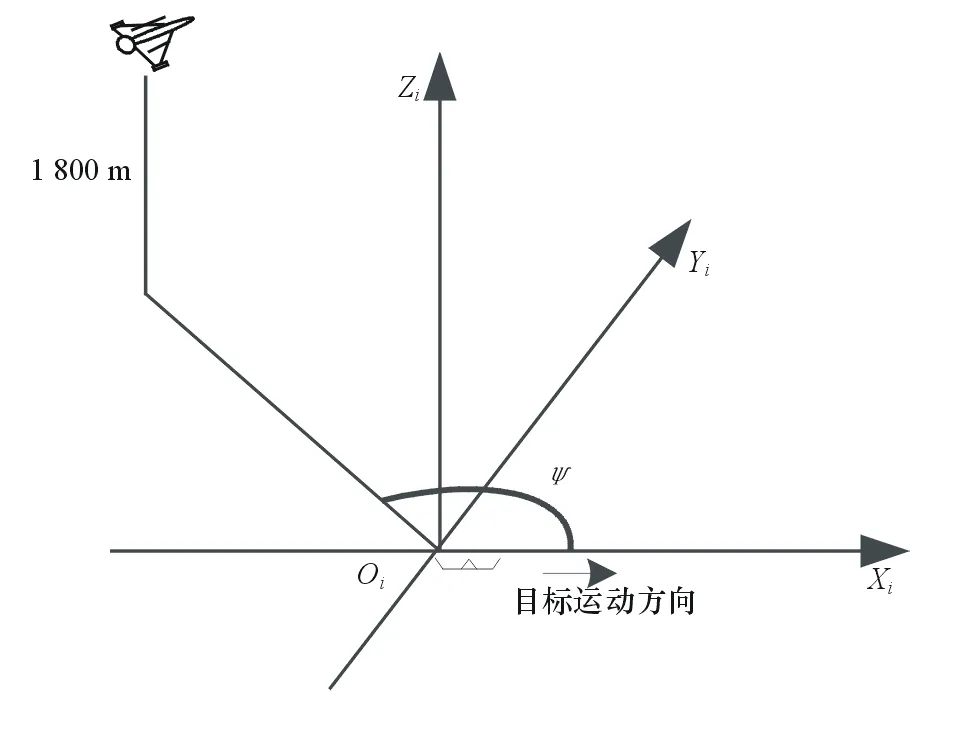
图6 攻击角定义示意图
(1) 反辐射无人机攻击角为135°,目标静止状态下ARUAV攻击仿真。
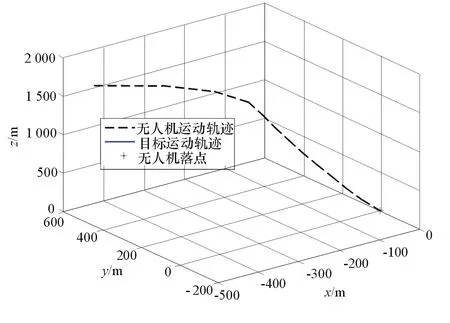
图7 无人机对静态目标的攻击路径
目标静止不动时,无人机攻击的仿真路径如图7示。由图可见,ARUAV先是平飞,待目标俯仰角足够大时发起俯冲攻击,仿真结果表明无人机的最终引爆点坐标为(-1.95,-0.68,2.9),攻击误差小,目标将被摧毁。这与实际靶射实验的数据接近,说明ARUAV对静态目标的攻击精度高,验证了模型的有效性。
(2) 攻击角不变,设定目标航速10.3m/s时,ARUAV攻击动目标仿真。
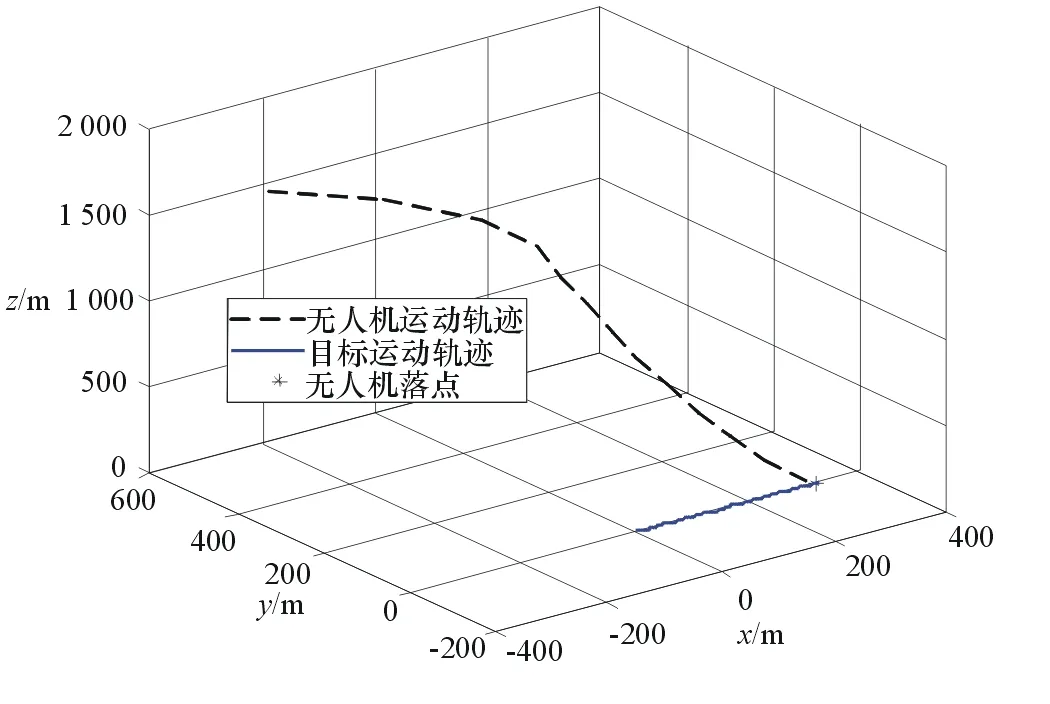
图8 目标航速10.3 m/s时无人机攻击路径
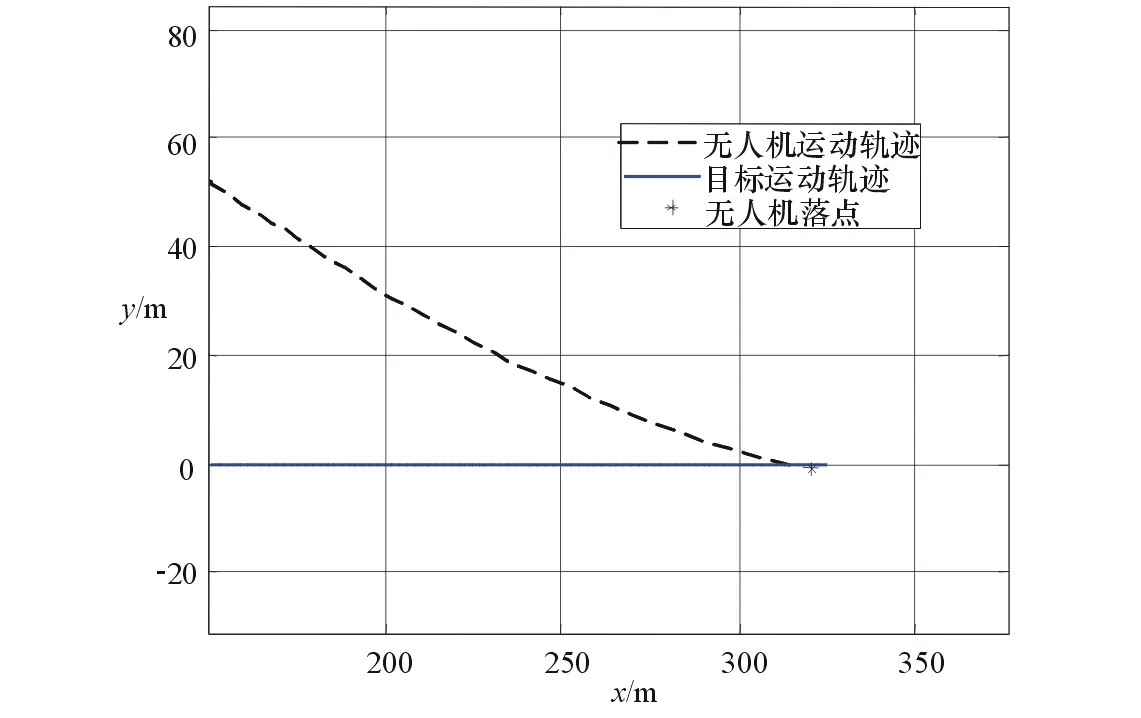
图9 目标航速10.3 m/s时无人机攻击路径在水平面投影
图8为目标航速10.3m/s时无人机的攻击路径,仿真同时还给出了目标和无人机的运动轨迹在水平面投影,如图9所示。结果表明,无人机引爆点坐标为(317.6,-0.85,2.38),目标坐标为(323.3,0,0),对目标仍有一定的毁伤效果。
(3) 目标航速分别为10.3m/s和15.4m/s时,ARUAV分别从不同的攻击角对目标发起攻击,并分别进行100次蒙特卡罗实验,对其平均攻击精度进行统计,结果如图10所示。由图可知,目标航速越高,攻击精度越低,特别是目标航速为10.3m/s、攻击角30°和目标航速为15.4m/s、攻击角20°时的攻击精度最差。
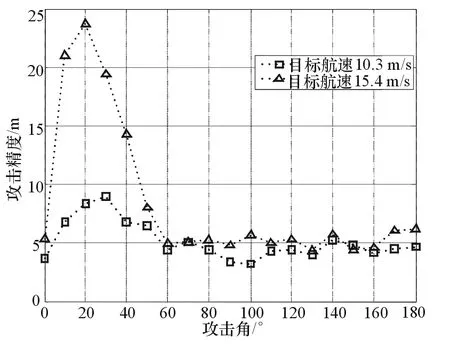
图10 不同攻击角时无人机的攻击误差
进一步分析上述2种仿真场景下无人机的末端轨迹投影,如图11所示。
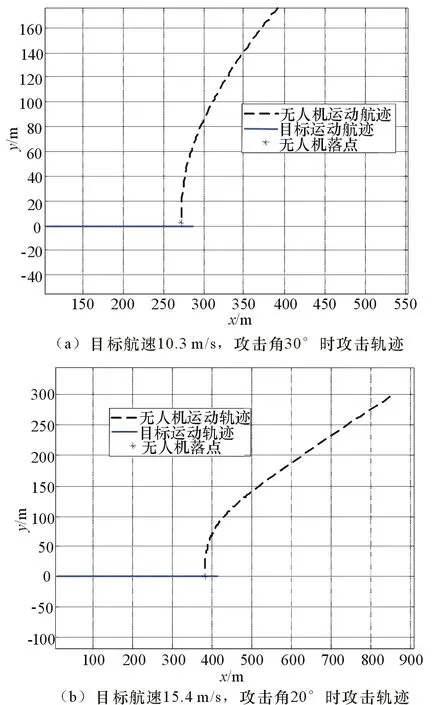
图11 2种仿真条件下攻击路径在水平面投影
分析可知,ARUAV迎面从目标侧方开始攻击时,跟踪过程对无人机飞行机动性能要求高,而机体本身飞行过载能力有限,姿态调整不及时,难以实现精确的跟踪,导致攻击误差很大。
因此,ARUAV入侵方向与攻击精度确实密切相关,在运用无人机攻击移动目标时,应当注意合理规划航迹,选择合适的攻击角。
4 结束语
本文通过分析ARUAV飞行和测向原理,建立起基于比相体制测向技术的ARUAV攻击移动辐射源的动态模型,计算机仿真验证了模型的可行性。对ARUAV攻击移动目标的攻击角进行了定义,并主要探讨了ARUAV在不同攻击角条件下对移动辐射源的攻击效果。
仿真表明,ARUAV受自身机动性能制约,采用不同攻击角时,攻击精度相差较大。因此,为了充分发挥无人机的作战效能,在运用ARUAV攻击移动辐射源时,合理规划攻击路径、选择合适的攻击角度对提高无人机攻击效能意义重大。
[1] 温杰.辐射无人机的现状与发展[J].飞航导弹,2000(7):4-5.
[2] 王龙涛.水面舰艇对抗反辐射无人机对策研究[J].舰船电子对抗,2009,32(4):12-14.
[3] 潘奎,潘英锋,陈蓓,冷毅.诱饵诱骗条件下反辐射无人机攻击过程建模仿真分析[J].舰船电子对抗,2012,35(6):59-66.
[4] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学 [M].北京:北京理工大学出版社,2000.
[5] 任刚强.雷达有源诱饵系统对抗反辐射武器仿真研究[D].西安:西北工业大学,2005.
[6] 高烽.雷达导引头概论[M].北京:电子工业出版社,2010.
[7] 司锡才,赵建民.宽频带反辐射导弹导引头技术基础[M].哈尔滨:哈尔滨工程大学出版社,1996.
Simulation Analysis of Attack Effect of ARUAV to Mobile Emitter Target
JIANG Wei-hang,PAN Ying-feng
(Air Force Early Warning Academy,Wuhan 430019,China)
Modern surface ship is one of the main weapons for world's powerful nations to contest the sea control right.In order to apply the anti-radiation unmanned aerial vehicle (ARUAV) to attack and suppress the ships effectively and take full characteristics of ARUAV's anti-radiation campaign,it is particularly important to research the attack effect of ARUAV to mobile emitter.Based on ARUAV terminal guidance and direction finding (DF) theory of passive seeker,this paper establishes the simulation model of ARUAV attacking mobile targets,discusses the relationship between the attack accuracy and attack angle of ARUAV,which has a certain support function for the campaign research of ARUAV attacking mobile targets.
anti-radiation unmanned aerial vehicle;mobile emitter;attack angle;attack accuracy
2015-03-20
V271.4
A
CN32-1413(2015)04-0076-05
10.16426/j.cnki.jcdzdk.2015.04.020
猜你喜欢
水上消防(2022年1期)2022-06-16
北京航空航天大学学报(2020年10期)2020-11-14
海洋开发与管理(2020年2期)2020-09-10
雷达学报(2018年5期)2018-12-05
舰船科学技术(2018年7期)2018-07-25
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
制导与引信(2016年3期)2016-03-20
舰船科学技术(2016年1期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
