
大型预应力张弦钢结构滑移、同步提升技术
2015-03-24 05:11吴大刚李建亭葛志鹏张红枭
四川建筑 2015年6期
吴大刚, 李建亭, 葛志鹏, 张红枭
(中国建筑第八工程局有限公司西南分公司, 四川成都 610000)
大型预应力张弦钢结构滑移、同步提升技术
吴大刚, 李建亭, 葛志鹏, 张红枭
(中国建筑第八工程局有限公司西南分公司, 四川成都 610000)
某工程建筑中庭顶(七层楼面)有大型吊挂式预应力张弦钢结构采光天窗,由于现场作业面狭小,无法提供足够的拼装作业面,塔吊距离天窗安装位置较远,无法起吊太大的钢构件,工期也比较紧。若按照传统方法施工,措施工程量非常大,且高空作业量很大。为加快采光天窗的施工速度,降低相应措施成本,提高施工质量,根据现场实际情况及结构形式,特采用滑移拼装+整体提升的施工方法安装天窗钢结构。
城市综合体; 采光天窗; 钢结构; 累积滑移; 同步整体提升
1 工程概况
某工程为城市综合发展项目A1A2A3地块工程,天窗位于整个A1裙房中部,平面位于E-J轴/13-22轴之间,北边为屋顶标高35 m的宴会厅区域,南边为7层混凝土结构,其西边是A1塔楼。
天窗下部楼板根据建筑设计全部中空,天窗为此区域的屋顶围护结构,起到采光和封闭建筑的作用。
天窗结构长度76.500 m,最大跨度32.800 m,总面积1 759.4 m2,总共240 t。空间钢网格主要由方管构件拼装组成,标高+32.750,网格平面尺寸约为3 m×3 m,截面采用方钢管截面。预应力拉索桁架跨度有两种,15轴桁架跨度为23.8 m,其余跨度均为17m。预应力拉索桁架杆件包括有上弦杆、下弦预应力索、斜拉杆和竖向撑杆。
2 主要施工工艺技术
根据结构的布置形式和天窗结构对应的下方混凝土结构布置情况,将天窗安装分为3个区域,分别为A1-1区、A1-2区和A1-3区。其中A1-1区为累积滑移区域,A1-2区为楼面拼装区,A1-3区为天窗提升就位后在吊装区域(图1)。
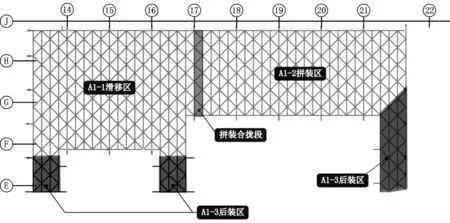
图1 天窗拼装分区示意
2.1 现场拼装滑移技术
2.1.1 滑移拼装及轨道安装
在建筑5层楼面13轴~14轴有楼板区域搭设拼装胎架,并在平行于H轴和F轴的楼板边缘安装滑移轨道。每条轨道从13轴开始铺设,一直铺设至17轴线(图2)。滑移轨道钢梁采用焊接H型钢,规格为H 600×400×12×20,轨道梁和下部胎架焊接固定。轨道梁下部设置转换横梁,横梁截面H 400×300×10×14。滑移轨道采用43 kg/m轨道,轨道通过压板与热轧H型钢轨压紧连接,压板间距为800 mm。
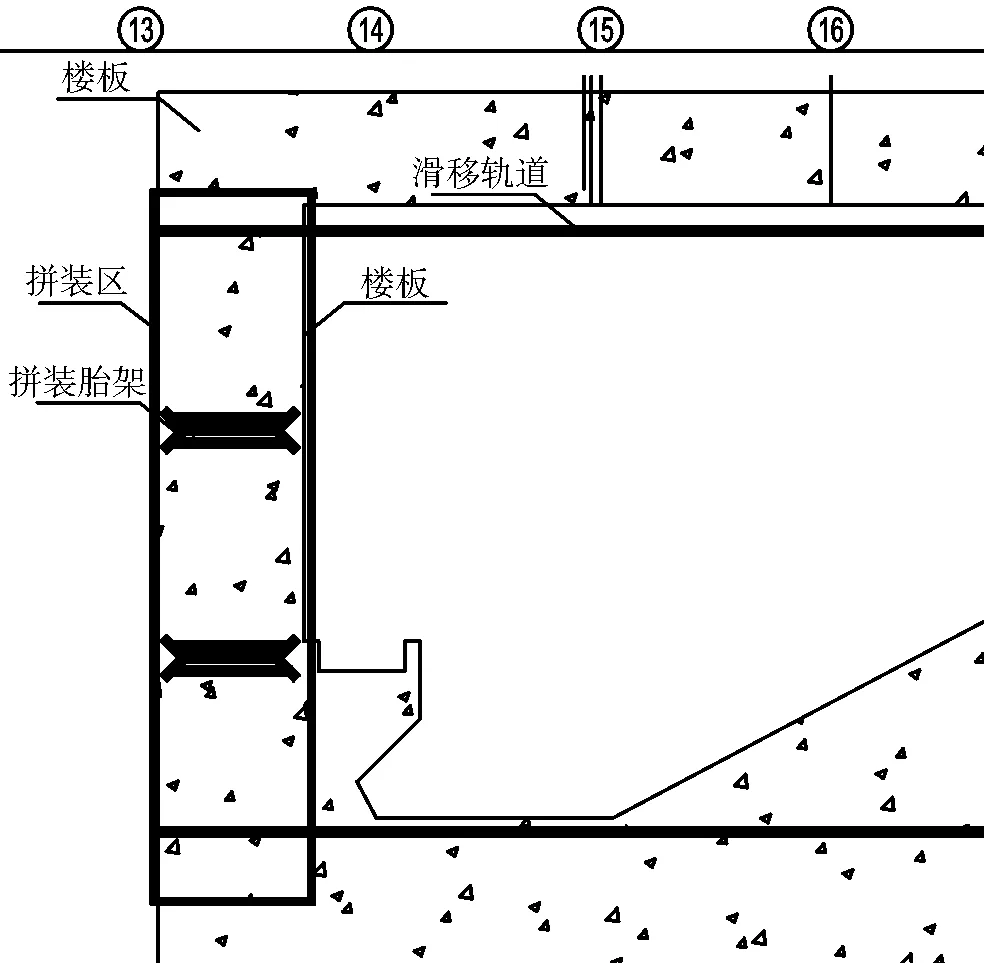
图2 滑移拼装胎架及轨道布置
考虑到天窗滑移单元两边牛腿间距过大,而拼装平台宽度较窄,因此两边加焊临时牛腿并设置滑靴保证整个天窗结构滑移。共设置18个滑靴,每边各9个滑靴,保证了整个滑移区天窗架在轨道上滑移。
2.1.2 爬行器选用及布置
2.1.2.1 滑移推力统计
在滑移过程中,顶推器所施加的推力和所有滑移座与滑道间的摩擦力f达到平衡。
摩擦力f=滑移座在结构自重作用下竖向反力×1.2×0.15。
滑移座与滑轨之间的摩擦系数偏安全考虑取为0.2,1.2为自重放大系数。
滑移单元的重量约为90 t,则顶推滑移过程中所需的顶推力为:
f=90×1.2×0.2=21.6 t
单个滑移单元每条滑道上设置1个顶推点,每个顶推点配置1台RY 30-600型液压顶推器,单个滑移单元共配置2台。单台RY 30-600型液压顶推器的额定顶推驱动力为30t,则顶推点的总顶推力设计值为60t>21.6t,能够满足滑移施工的要求。
单个提升单元各条滑道所需顶推力见表1。

表1 滑移区滑道顶推力统计
2.1.2.2 液压爬行器布置
满足钢网格天窗累积滑移驱动力的要求,尽量使每台液压爬行器受载均匀;尽量保证每台泵站驱动的液压爬行器数量相等,提高泵源系统利用率。在总体布置时,要认真考虑系统的安全性和可靠性,降低工程风险。
2.1.3 滑移同步控制
2.1.3.1 同步控制策略
液压滑移同步控制应满足两点要求:(1) 尽量保证各台液压牵引器均匀受载;(2) 保证各个滑移点保持同步。
控制系统根据一定的控制策略和算法实现对设备滑移的姿态控制和荷载控制。在液压爬行过程中,从保证安全角度来看,应满足两点要求:(1) 保证各个推进点均匀受载;(2) 保证推进结构的姿态稳定,使在滑移过程中能够保持同步。
根据以上要求制定控制策略为:将E轴线上的液压爬行器1号设定为主令点1,其余液压爬行器设为从令点,在计算机控制下从令点以位移差跟踪主令点,保证每个牵引点在滑移过程中始终保持同步(同步精度为±5 mm),保证钢桁架在整个滑移过程中的稳定和平衡。
2.1.3.2 同步测控
在滑板上设置容栅旋转位移传感器,将磁铁吸附在滑道上,保持纯滚动,形成位移反馈、速度控制的计算机闭环系统,随时进行滑移过程的测控。
牵引器同步采用液压牵引系统本身的计算机系统控制,同步精度可控制在10mm以内。
监测仪器为瑞士莱卡仪器厂的TC 2000全站仪,其测量边精度为3mm+2×10-6,测角精度为1″,可自动记录并处理观测数据,具有精度高、速度快的特点,可以满足监测的精度要求。
2.1.3.3 计算机同步控制系统
液压同步滑移施工技术采用计算机控制,通过数据反馈和控制指令传递,可全自动实现同步动作、负载均衡、姿态矫正、应力控制、操作闭锁、过程显示和故障报警等多种功能(图3)。
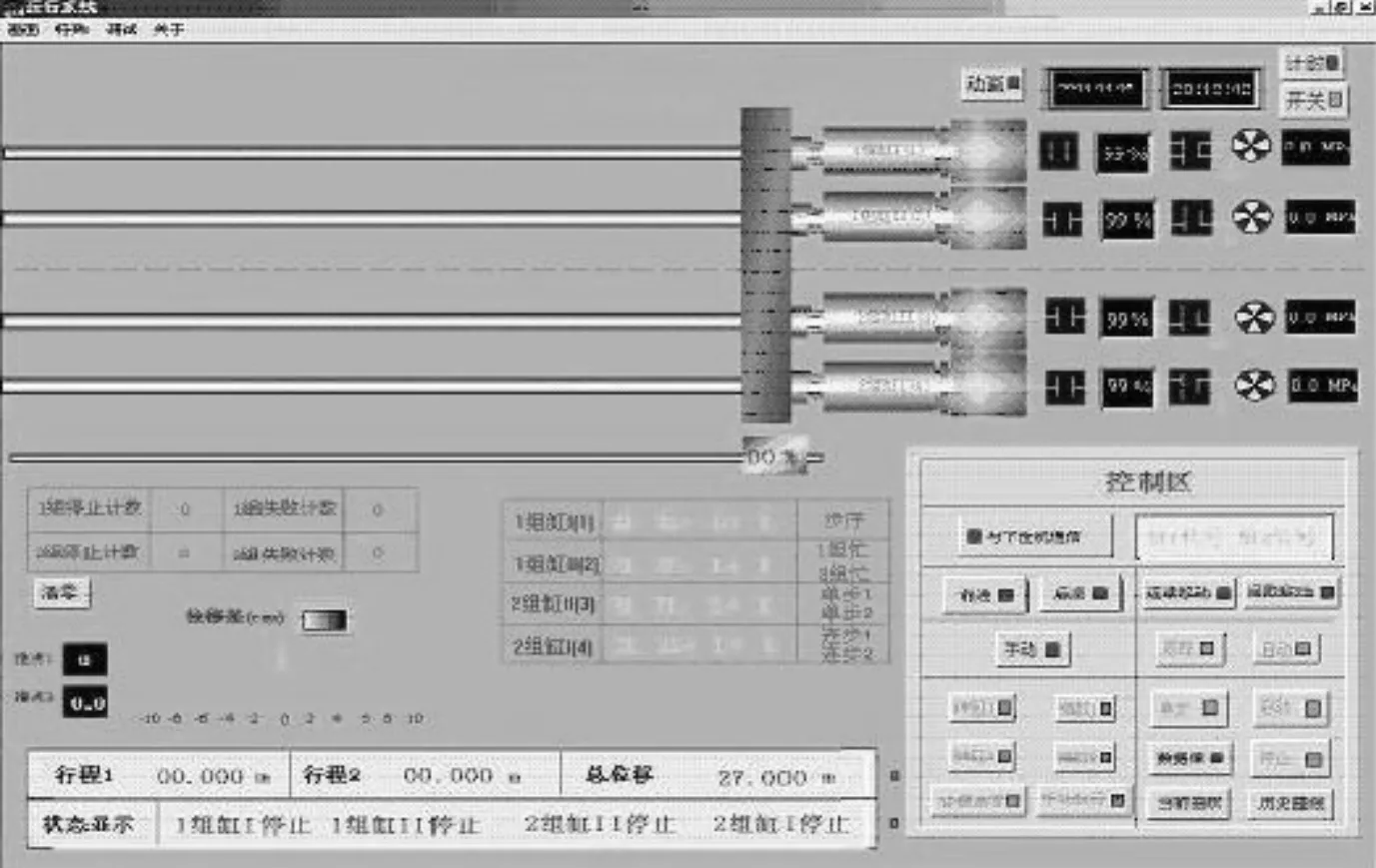
图3 液压牵引控制系统组态人机界面
2.2 液压同步整体提升技术
“液压同步提升技术”采用穿芯式结构液压提升器作为提升机具,以柔性钢绞线作为提升承重索具,有着安全、可靠、承重件自身重量轻、运输安装方便、中间不必镶接等一系列独特优点。液压提升器两端的楔型锚具具有单向自锁作用,当锚具工作(紧)时,会自动锁紧钢绞线;锚具不工作(松)时,放开钢绞线,钢绞线可上下活动。当液压提升器周期重复动作时,被提升重物则一步步向前移动。本工程液压提升器一个行程距离为30 cm,正式提升速度约为8 m/h。
2.2.1 相关提升技术参数
天窗滑移部分就位后,与其他天窗结构对接拼装成为整体结构,对整体结构进行提升。提升点位布置依据原结构中拉杆和吊柱的位置,共设18个提升点(图4),每个提升点布置1台40 t油缸。
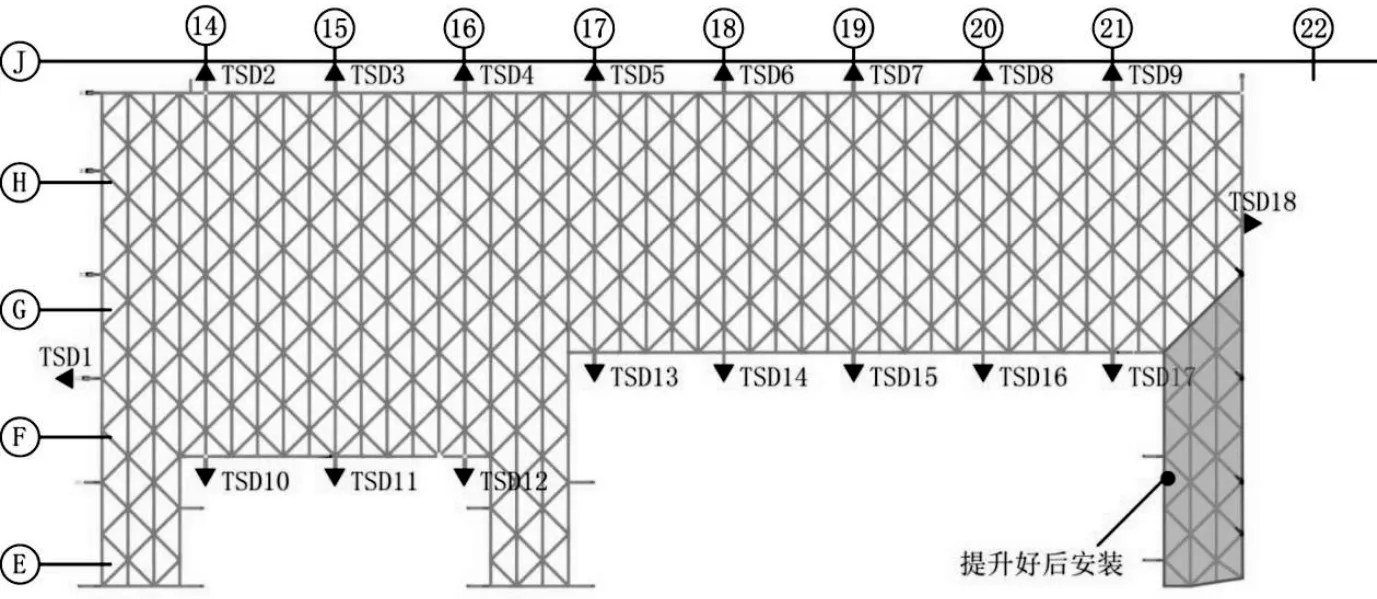
图4 天窗提升点布置
油缸及钢胶线性能见表2、表3。

表2 油缸性能

表3 钢绞线性能
根据上海市工程建设规范《重型结构(设备)整体提升技术规程(DG/TJ08-2056-2009)》,第7.1.3规定总提升能力(所有提升油缸总额定载荷)应不小于总提升荷载标准值的1.25倍,且不大于2倍;第7.1.2规定提升油缸中单根钢绞线的拉力设计值不得超过其破断拉力的50%。因此此提升能力储备系数及钢绞线的安全系数完全满足大型构件提升工况的要求。
2.2.2 泵站的布置
结合本工程提升油缸的布置,共准备5台液压泵站,流量为80 L/min。泵站为双泵、双比例阀和双路液压泵站,两路既能够独立使用,也能够合并使用。
根据上述液压泵站配置,提升速度可达3~5 m/h。泵站技术参考见表4。

表4 泵站技术参数
2.2.3 提升同步控制
提升控制系统见图5。
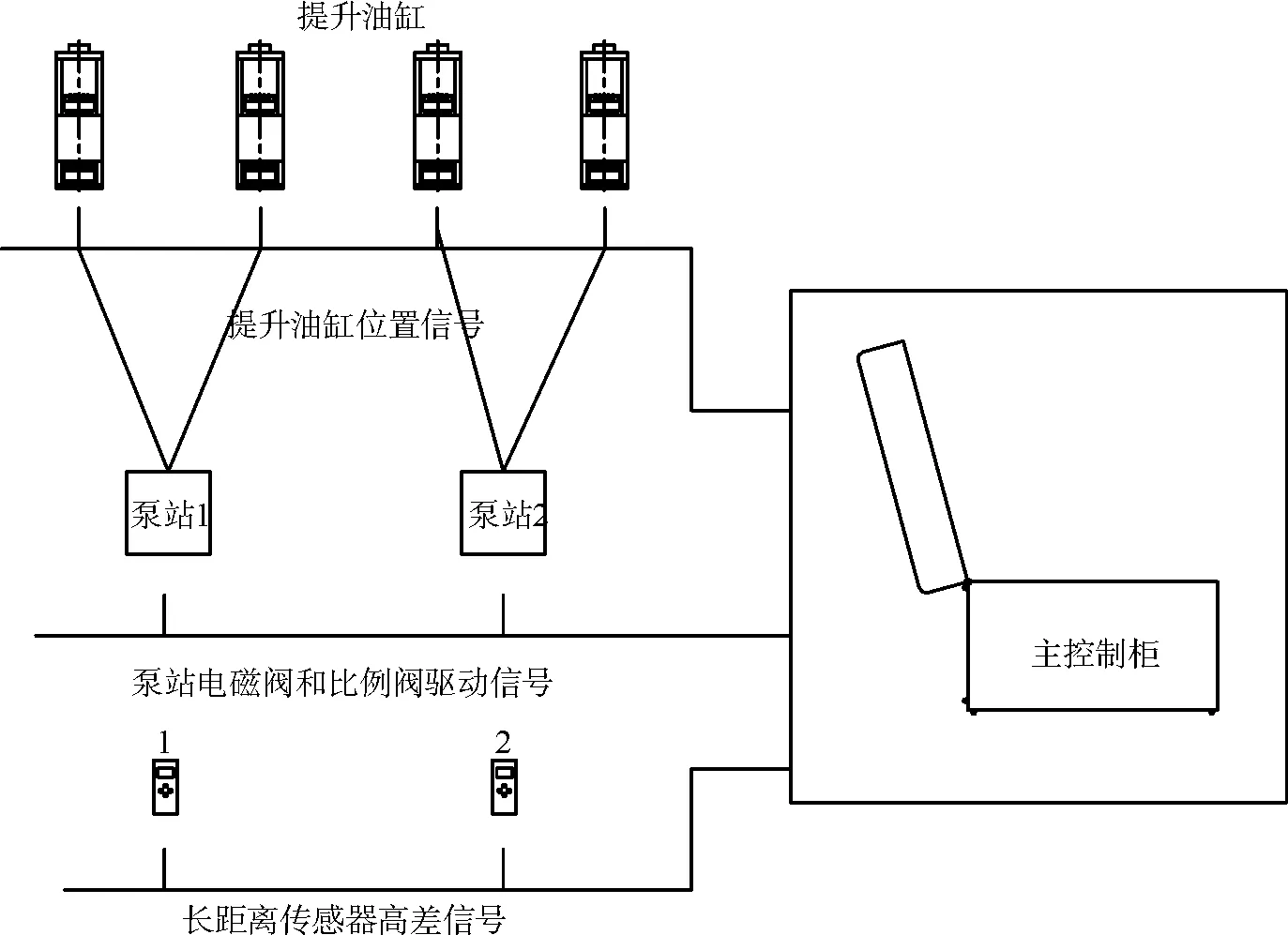
图5 计算机同步控制系统
(1) 地面布置1台计算机控制柜,从计算机控制柜引出比例阀通讯线、电磁阀通讯线、油缸信号通讯线、工作电源线。
(2) 通过比例阀通讯线、电磁阀通讯线将所有泵站联网。
(3) 通过油缸信号通讯线将所有油缸信号通讯模块联网。
(4) 通过电源线将所有的模块电源线连接。
当完成传感器的安装和现场实时网络控制系统的连接后,计算机控制系统的布置就完成。
2.3 预应力张拉技术
预应力张拉进行2级张拉,不考虑结构屋面荷载,长跨最大钢拉杆张拉力为696 kN,短跨最大张拉力475 kN,每榀预应力桁架在拼装滑移时张拉90%,提升完毕后张拉至设计值。
钢拉杆的安装端位于杆的两端,采用的叉耳式索头。安装前检测耳板的厚度是否与索头配套,若有差别尽快调整。安装时将套筒松开一定的长度以便于安装。钢拉杆的张拉端位于中间的连接套筒处,张拉工装及张拉操作均在此处进行。
张拉端在拉杆的中间,张拉节点位于径向杆连接套筒处。施加预应力的方法是:根据设计张拉力的值,通过油泵将油压传给两个千斤顶,然后调节自身的调节套筒达到所要施加的力。
由于工程张拉设备组件较多,因此在进行安装时必须小心安放,使张拉设备形心与钢拉杆重合,以保证预应力钢拉杆(索)在进行张拉时不产生偏心。
在油泵启动供油正常后,开始加压,当压力达到钢拉杆(索)设计拉力时,超张拉5%左右,然后停止加压。张拉时,要控制给油速度,给油时间不应低于0.5min。
3 施工体会
通过对该项目的实施,对安装高度高、跨度较大、施工场地狭小的城市综合体屋顶采光天窗的滑移、整体提升等施工方法进行了验证,达到了提高工作效率、降低施工成本、保证施工质量及安全的目的,特别适用于大型公共建筑、城市综合体、体育场馆等大体积建筑屋顶天窗或屋盖结构的安装。
本施工方法是将传统的搭设满堂支撑架作为操作平台进行高空散拼,根据现场实际情况及结构特点调整为先在最高楼板面上进行滑移拼装,然后在进行整体提升的施工方法。此施工方法符合社会可持续发展要求,节约施工成本,缩短施工工期,同时保证施工质量和安全。这种滑移+提升相结合的施工方法在类似结构施工中上属首次。
[1] 吴欣之.现代建筑钢结构安装技术[M].中国电力出版社,2009.
[2] GB 50755-2012 钢结构工程施工规范[S].
吴大刚,男,大学,工程师。
758.11
B
[定稿日期]2015-11-30
猜你喜欢
橡塑技术与装备(2021年24期)2021-12-30
锻压装备与制造技术(2021年3期)2021-08-13
劳动保护(2019年7期)2019-08-27
模具制造(2019年3期)2019-06-06
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
汽车维护与修理(2017年17期)2017-02-07
铁道机车车辆(2016年3期)2016-10-25
浙江大学学报(工学版)(2016年2期)2016-06-05
石油化工建设(2015年6期)2015-12-01
汽车维护与修理(2015年5期)2015-02-28
