建筑板材安装机器人自动供料系统的研究设计
2015-03-24 09:46侯满哲郭全花王月亭
河北建筑工程学院学报 2015年4期
马 宏 侯满哲 郭全花 王月亭
(河北建筑工程学院,张家口 075000)
建筑板材安装机器人自动供料系统的研究设计
马 宏 侯满哲 郭全花 王月亭
(河北建筑工程学院,张家口 075000)
自动供料问题广泛存在于工业领域中,为了实现室内装修机器人的自动化供料专门设计了一套室内装修机器人供料系统.本文采用了机电一体化的设计思想,对供料系统的整体功能、驱动装置、传动系统及控制系统进行了分析和设计,从而得出了经济型、实用化、高可靠性的供料系统的设计方案.在此基础上,完成了各种电气元件的选型及典型零件的优化设计.该机结构紧凑、操作简单、自动化程度高,能大大提高板材安装机器人的取料精度和速度.
建筑机器人;室内装修;板材供料;机械结构
0 引 言
从20世纪40年代至今,全球范围的科技革命促进了生产和生活方式的重大变化,机器人的诞生和机器人学的建立,无疑是世纪人类科学技术的重大成就.正如宋健院士在国际自动控制联合会第14届大会报告中所指出的那样:“机器人的进步和应用是本世纪自动控制最有说服力的成就,是当代最高意义上的自动化.”[1]机器人作为一种高技术,也是不断发展和完善的,这种不断的发展和完善是通过科技革命的内在推动力来实现的.同时,机器人的发展和广泛应用,使科学技术成为显见的生产力,极大地推动着科学技术的发展,推动着人民生活的改善,推动着生产力的提高,推动着整个社会的进步[2].机器人技术作为当今科学技术发展的前沿学科,将成为未来社会生产和生活中不可缺少的角色.
工业机器人技术是当今世界最引人注目的高新产品之一.许多国家都把发展机器人作为高技术领域的战略目标列入国家发展计划,但各国的发展模式有所不同.1954年美国的GG戴沃尔发表了“通用重复性机器人”专利论文,第一次提出了“工业机器人”和“示教再现”的概念,1959年unimation公司推出了第一台工业机器人.1967年日本从美国引进unimate和veisatran等类型的工业机器人以后,仅用了10年左右的时间,便形成了自己的机器人产业,成为世界上应用和生产机器人最多的国家,其工业机器人的安装数量约占全世界的60%.
进入20世纪90年代以来,由于具有一般功能的传统工业机器人的应用趋向饱和,而许多高级生产和特种应用则需要具有各种智能的机器人参与,因而促使智能机器人获得较为迅速的发展.无论从国际或国内的角度来看,复苏和继续发展机器人产业的一条重要途径就是开发各种智能机器人,以求提高机器人的性能,扩大其功能和应用领域.这正是从事智能机器人研究和应用的广大科技工作者施展才干的大好时机[3-5].
我国也同样重视机器人技术的发展与其应用的结合,机械部科技司赖维德高工说:“要解决用好机器人的问题,主管部门要鼓励机器人研制生产单位和用户紧密结合坚持以实际应用带动机器人发展的方向”[6].我国装修机器人的起步比相对较晚,但是装修机器人在实际应用的如何不仅取决于机器人本身的成熟和完善程度,而且取决于使用的经济效果,因此面对这样的趋势我们必须根据国情有分析的吸收和发展.哈尔滨工业大学已经研究开发出一种遥控式壁面爬行检查机器人,可用于检查、喷涂等作业[7].
在这样的情况下国家“863”计划确立了板材安装室内装修机器人系统的项目.本课题正是该项目的一个子课题.本课题的意义在于完善板材安装室内装修机器人项目的系统,是其实现上料的自动化控制,并且使其形成产业化的规模形势,课题研究具有重要的意义.
1 整机设计参数
(1)人工成批上料(每次20块),自动供料系统能自动取料(每次1块),并将板材进给至板材安装机器人取料工位,以保证板材安装机器人可靠吸取板材;
(2)按照人体工程学要求设计,供料系统自身的上料工位便于操作;
(3)保证板材供料过程中不能对板材安装端面及外表面造成任何划伤等损害;
(4)自动供料系统动作循环节拍:不超过10分钟;
2 整机结构方案设计
2.1 整体设计的基本原则
(1)对机器使用功能方面的要求.
实现预定的使用功能是机械设计的最基本的要求,好的使用性能指标是设计的主要目标.另外操作使用方便、工作安全可靠、体积小、重量轻、效率高、外形美观、噪声低等往往也是机械设计时所要求的.
(2)对机器经济性的要求.
机器的经济性体现在设计、制造和使用的全过程中.在设计机器时要全面综的进行考虑.设计的经济性体现为合理的功能定位、实现使用功能要求的最简单的技术途径和最简单合理的结构.
2.2 功能分析及运动分解
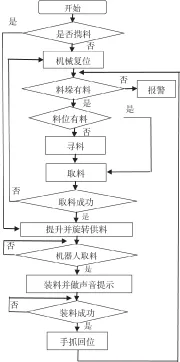
图1 动作流程图
(1)任务分析.
根据任务要求,系统需要有缺料报警机制,所以在机械复位后就应当首先检测是否有料以便判断是否需要报警,在判断后才可以进入正常的运行阶段.在运行阶段中系统需要完成从料垛取料,然后将料运送到指定位置,等待机器人取料.待取料完成后要回到取料位置,准备第二次取料.期间可能有意外出现,比如取料没有成功,机器人并未真正的取走料等,所以系统中要设置很多的检测元件.当意外发上后要设置相应的补救措施.如取料未成功就需要进行再次取料的动作.动作流程图如图1所示.
(2)工作节拍.
本系统的循环周期要求在十分钟以内,共包括“机械复位、寻料、取料、提升至供料位、给机器人装料、手抓回位”六个分动作以及“手抓是否携料、料垛是否有料、料位是否有料、是否成功取料、机器人是否到位、料是否被取走”六个检测判断.其中“机械复位”与“手抓是否携料”只有开机时执行一次.由于检测判断的时间远小于机械系统的动作时间,故在此处只列写动作节拍所占用的时间.各动作的动作节拍时间见表1.

表1 系统动作节拍
2.3 整机功能分解
系统的机械结构分为以下四部分:
(1)支撑机架.
支撑架是其他各结构的支撑部分,其与地面由可调地脚螺钉接触,该设计可使系统在任何地面上保证系统水平.支撑机架如图2所示.

图2 支撑机架仿真图
(2)提升机构.
提升机构用于完成板材的提升、寻料和给机器人安装板材的三个预定动作.其与下部的支撑机架连接,上部与回转机构连接.系统共有两个提升机构,分别安装于系统俩侧,中间由方钢连接.提升机构由步进电机驱动,由竖直的丝杠将转动变化成直线运动.每个丝杠两侧各配有一个光杠,光杠上装有直线轴承,轴承与中间的支撑架相连接.提升机构如图3所示.

图3 提升机构仿真图 图4 回转机构仿真图
(3)回转机构.
回转机构由铝材做成的一个“回”形支架,与板材连接的抓手就固定在这个这个“回”形支架的两条铝材上.“回”形的其余两边上装有垂直的方钢,在方钢的另一头连接有轴承支座,通过轴承与传动的旋转轴连接.连接处的轴承,可保证回转机构顺利旋转.其驱动也由步进电机驱动,由齿轮传动到旋转旋转轴,由旋转轴将动力传动到旋转处.回转机构如图4所示.
(4)板材料垛机构.
由于每次上料为20快,料垛重量达到1 000 kg,高度高达900 mm.故将供料机构单独设计,然后再保证其与主机构的定位.供料机构设计为一个小车,下部由万向轮支撑,可保证小车移动.上面安装有定位杆,不同的板材可以将定位杆安装在不同的定位孔上.每次小车上的料被取完后,推走装料即可,然后再推入.板材料垛机构如图5.
2.4 系统装配仿真图
系统的装配仿真如图6所示.
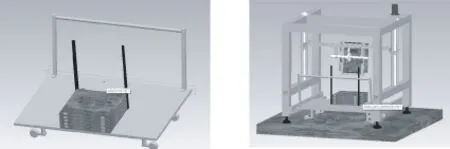
图5 板材料垛机构 图6 系统装配仿真图
2.5 关键技术分析计算
(1)电机轴上的等效转矩及等效转动惯量的计算.
移动部件质量M=200 kg,速度v=300 mm/s,转动部件质量M2=10 kg,转速200 r/min回转半径r=20 mm,长度L=1 800.
=20×10-4+0.04×10-4kgm2
≈20×10-4kgm2
摩擦系数u≈0.003~0.005,摩擦力F=2 umg=2×0.005×200 kg××10 m/s2=20 N


图7 电机加速过程示意图
惯性转矩:加速过程如图7所示.

惯性转矩T2=Jε=20.04×10-4×698.13=1.4 Nm
理论启动转矩T=T1+T2=3×10-3+1.4≈1.4 Nm
取机械效率η=75%,实际启动转矩Ts=1.4/0.75=1.87N·m
实际启动功率Ps=293/0.75=390W
取安全系数k=2,电机启动转矩T0=k·Ts=3.74N·m
电机启动功率P0=k·Ps=780W
(2)当量载荷.


(3)额定动载荷.

(4)滚珠丝杠底径d2m.
支承方式为一端固定一端游动,取支撑系数a=0.039,摩擦力F0=u0mg=20 N,滚珠丝杠支点间距离:L=1.1×1 400+(10~14)×10=1 680 mm
(5)同步性解决方案.
系统左右俩侧运动的同步问题是本设计的技术难点,该问题是指系统俩侧的两个提升机构以及回转机构俩侧的运动能否同步,能否真正的将负载的重量平均分到系统的俩侧,如果不能的话,将造成系统受力不均,相当于有内应力存在,影响系统的运行精度,寿命等参数.
问题的解决:提升机构中,只用一个电机作为驱动源,保障了动力源的同一性;然后用同步带将左右两侧的丝杠连接保证了左右俩个丝杠运动的同步性,通过以上方法保证了左右提升机构的同步性问题.在回转机构中,同样采用一个电机作为驱动源,保证了动力源的的同一性;然后将传动齿轮装在传动轴的正中间,左右负载均匀,形成了左右有对称的形式,保证左右运动的同步性.通过以上的方法解决了系统的同步性问题.
3 结 论
板材供料系统的完成使国家“863计划”项目—板材安装室内装修机器人系统的板材自动供料问题得到很好的解决,从而使板材安装室内装修的自动化水平大大提高.板材自动供料系统是供料机械中典型的机电一体化产品,对其进行研究不仅具有很高的应用价值,同时还有很高的理论价值.本文通过对板材供料系统整体结构及典型零件的设计主要完成了以下工作:
对板材供料系统采用机械电子学思想进行了总体设计.立足于机电一体化的观点,对板材供料系统的结构形式、驱动装置、传动方式等各组成部分进行了较为全面的分析,最后得出板材供料系统的总体方案.该方案结构简单、运行可靠,满足设计基本要求.
在满足使用要求的前提下,对各种电气元件选型进行了比较,做出经济合理的选择,争取在最大范围内降低成本,满足了设计的经济性要求.结合使用要求,工艺要求等对各种典型零件结构进行设计,使本供料系统做到了安装简单、运行可靠.
[1]第17届国际建筑机器人学术讨论会简介[J].国内外机电一体化技术,2001,(05):4~5
[2]Fang Tea Hyun.Deteetion and diagnosis of sensor and actuator failures using perception net.Proeeedings of the SICE Annual Conferenee,1999,7:893~896
[3]机器人技术与应用,Robot Technique and Application.2009,(06):24~26
[4]赖维德.我国工业机器人的发展走向——访机械部科技司赖维德高工 机器人技术与应用.1998,(03):44~48
[5]陶格兰.机电一体化在国外建筑机械上的应用[J].建筑机械.1986,(11):14~18
[6]Young,Jun.Vision and Policy on Korea‘s Robot Industry.The 4~(th) China-Korea-Japan Joint Workshop on Robotics
[7]Y.Morita,H.Ukai and H.Kando.“Robust trajectory tracking control of elastic robot manipulators.J.1997,(119):727~735
[8]孙伟,于永璋.几种建筑机器人概介[J].建筑机械化.1990,(06):22~24
The Study and Design of Automatic Feeding System of Building Board Installation Robot
MAHong,HOUMan-zhe,GUOQuan-hua,WANGYue-ting
(Hebei university of architecture,Zhangjiakou 075000)
Automatic feeding problems widely exist in industry.A feeding system of interior decoration robot was designed in order to achieve the automatically supplying interior decoration materials.Electromechanical integration designing thought was adopted in this article and that means analyzing and designing about overall function,drive,driving device,transmission system and control system of the feeding system so that a economical,practical and highly reliable desing scheme of feeding system was created.Based on this,type selection of all kinds of electrical elements and optimal designing of typical part were finished.The machine has a compact structure,an easy way to operate and a high degree of automation and all of these can greatly improve the reclaiming precision and speed of building board installation robots.
Building Robot;Interior Decoration;Sheet Feeding;Mechanical Structure
2015-05-26
马宏(1979-),男,助教,从事工用机器人研究.
TH 12
A
猜你喜欢
轮胎工业(2022年10期)2022-12-30
制造业自动化(2017年2期)2017-03-20
轮胎工业(2017年9期)2017-03-09
国际木业(2016年4期)2017-01-15
国际木业(2016年6期)2016-02-28
印制电路信息(2015年6期)2015-12-30
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
原子能科学技术(2014年2期)2014-05-25