
可变助力转向系统在汽车主动安全领域的应用
2015-03-23 17:11唐炜董殿阳
科技资讯 2014年35期
关键词:行为特征
唐炜++董殿阳

摘 要:该文针对因驾驶员规避障碍过晚而可能发生碰撞的情况,分析了驾驶员的行为特征,提出将可变助力系统应用于汽车主动安全领域的思路,最终达到提高行车安全的目的。
关键词:主动安全 可变助力 行为特征
中图分类号:U463.4 文献标识码:A 文章编号:1672-3791(2014)12(b)-0079-01
随着科学技术的进步,汽车的普及和应用将更加普遍和深入,随之带来的道路交通安全问题也已成为世界性的大问题,汽车的安全性能对人类生命和财产安全的影响是不言而喻的。近些年,越来越多的先进技术被应用到汽车上,汽车的安全性能正日趋完善[1]。
汽车安全技术可以分为被动安全技术和主动安全技术。被动安全技术如安全气囊、安全带等主要针对事故发生后减轻人员伤害和货物损失,主动安全技术如防抱死制动系统、防滑系统等主要作用是避免事故的发生。当前主动安全技术的研究已经成为领域热门。
1 可变助力转向系统介绍
目前大部分汽车都装有助力转向系统,转向助力系统主要用于协助驾驶员调整方向,减轻驾驶者的疲劳强度。随着汽车技术的进一步发展,普通的助力系统也暴露出其局限性,汽车高速行驶时由路面通过轮胎反馈到方向盘的路感降低了,高速时方向盘太轻造成方向稳定性变差。所以出现了可变助力转向系统,主要作用为在车速高时减少助力使方向盘变重以增加稳定性,低速时增加助力使方向盘变轻以减轻疲劳强度[2]。
可变助力转向系统根据其变化的助力类型不同,大致可以分为两类:助力力度可变的助力转向系统和速比可变的助力转向系统。助力力度可变的助力转向系统能够随车速改变助力力度,在低速行驶状态下助力增大转动方向盘更加轻盈省力,而当车辆高速行驶时,能够降低助力,使方向盘转动阻力增大,手感变沉,灵敏度降低,车辆行驶稳定性得到提升。速比可变的助力转向系统能够随车速而改变方向盘转动角与车轮转动角的比值,高速状态时调大比值,在转动相同方向盘角度的情况下车轮的偏转角更小,反之低速状态时调小比值。
2 可变助力转向系统应用于主动安全切入点
行驶在公路上的汽车因司机疏忽等原因遇到紧急情况时,如即将与前方障碍发生碰撞,驾驶员往往会采取两个动作用于避免发生事故:急踩刹车、急打转向盘。与常规制动不同的是,紧急情况下驾驶员的制动举措会更急促,刹车踏板所受压力会急剧增大。与常规转向不同的是,紧急情况下驾驶员的转向也会更迅速,转向轴所受的扭矩会急剧增大。在这种情况下车辆避免碰撞的最主要条件是与障碍物之间的距离足够大,如果两者之间距离不够则会因车辆绝对速度过大或转向不及时而发生碰撞,如果车辆转向系统的助力是可变的,并且在这种紧急情况下及时增大了助力,则车辆的偏向角会因此而增大,有利于车辆躲避障碍。
3 可变助力转向系统应用于主动安全设计
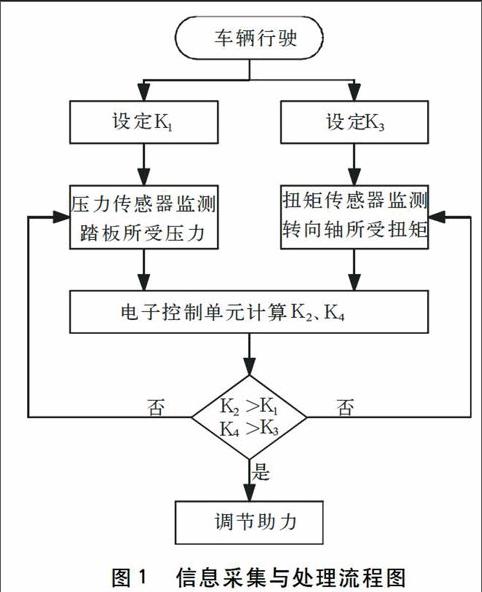
刹车踏板下安装压力传感器,压力传感器与电子控制单元相连接,用于实时监测驾驶员对踏板所施加的压力;转向轴安装扭矩传感器,扭矩传感器与电子控制单元相连接,用于实时监测驾驶员对转向轴所施加的扭矩。电子控制单元对两传感器传输来的数据进行实时处理并判别车辆是否遭遇紧急情况,当遭遇紧急情况则主动调节助力,使助力增大利于驾驶员避免车祸。
设踏板在常规制动时所受压力的变化率最大值为K1,电子控制单元计算出的实时压力变化率为K2;设转向轴在常规转向时所受扭矩的变化率最大值为K3,电子控制单元计算出的实时扭矩变化率为K4。电子控制单元对两数据K2、K4分别与K1、K3进行对比,当满足K2>K1,K4>K3时,可判定为紧急情况,即可调整助力。信息采集与处理流程图如图1所示。
K1、K3的取值基于大量数据分析的基础上得出,反映的是驾驶员对车辆发生碰撞的可控性,K1、K3两边的值表示紧急情况与常规情况,同时助力调节的大小也需要依据大量的碰撞数据拟合得出。
K2、K4通过电子控制单元计算得出。取某时刻t0为初始监测时刻,设监测周期为T,t0时刻监测到的压力为N1,t0+T时刻监测到的压力为N2,则在周期T内的压力变化率
同理,t0时刻监测扭矩为M1,t0+T时刻监测扭矩为M2,周期T内的扭矩变化率
K2、K4的计算值越大,表明监测周期内监测值的变化越大。
4 结语
可变助力系统应用于主动安全领域是汽车技术的一大理论创新。文中分析了一种特殊情况下可嵌入可变助力系统的两大切入点,即紧急情况踏板所受压力和转向轴所受扭矩有别于常规情况,在此基础上又提出了将可变助力系统应用于汽车主动安全领域的具体思路,并给出了几个主要参数的获取思路。
参考文献
[1] 杨秀芳,张新,常桂秀,等.汽车主动安全技术的发展现状及趋势[J].重庆工学院学报:自然科学版,2008,22(4):15-17.
[2] 罗新闻.汽车可变转向系统结构及工作原理[J].汽车维修与保养,2011(12):30-30.endprint
猜你喜欢
管理观察(2017年4期)2017-04-21
科教导刊(2016年34期)2017-03-31
中国绿色画报(2016年12期)2017-03-28
电脑知识与技术(2016年33期)2017-03-21
现代经济信息(2016年28期)2017-02-04
科技与创新(2016年12期)2016-06-25
黑龙江教育·高校研究与评估(2015年8期)2015-08-26
心理技术与应用(2014年6期)2014-08-08
