非扫描激光三维成像系统算法及工程实现
2015-03-23 06:06司一冰曹昌东眭晓林
激光与红外 2015年6期
张 颖,司一冰,曹昌东,刘 波,眭晓林
(1.华北光电技术研究所,北京100015;2.营口实验高级中学,辽宁 营口115005)
1 引言
非扫描激光三维成像探测技术作为一种新的激光成像探测技术,相对于扫描成像探测系统,具有以下的技术优点:成像速度快,当目标或测量设备移动时,无图像失真;可靠性好,激光发射器与接收器无须严格平行,没有高速扫描器,系统结构更加紧凑。针对这项技术的工程化研究对于地形地貌遥感测绘、数字地形和建筑物建模以及目标识别系统的研制具有重要意义。
2 系统工作原理
非扫描激光三维成像系统采用增益可调制的成像设备,接收探测目标物反射回的激光信号。因为成像设备对不同距离点的增益不同,所以所成图像上对应每一像素点的激光强弱就包含了目标各点的距离信息。
接收到的激光信号通过分光系统分配到两路CCD成像设备,其中一路设备对信号进行恒定增益调制,另一路设备对信号进行斜波增益调制。设从目标返回的激光信号功率用P0表示。
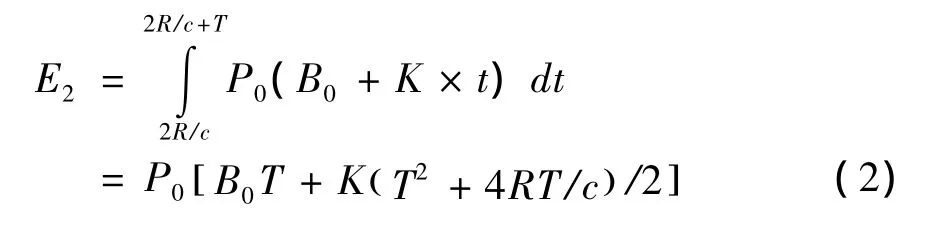
第一路设备的输出为输入信号乘以固定增益,因此输出信号为:
P1(t)=P0×B
CCD接收信号光能为:

其中,T为CCD曝光时间;c为光速;R为目标点距离。
第二路设备对输入信号进行斜波增益调制,此时增益为:

因此第二次的输出信号为:

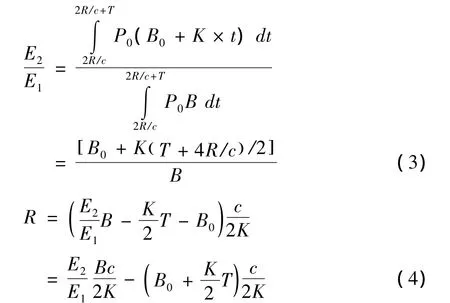
CCD接收信号光能为:
两路输出信号对应着强度不同的图像。因此将两次的图像强度对应相除,就能得到相应的距离信息。
根据以上的工作原理,设计并实现了非扫描激光三维成像探测系统工程化样机。系统主要由脉冲激光发射模块、光学接收模块、时序控制模块、增益控制模块、图像处理模块以及显示存储模块等几部分组成,组成示意图如图1所示。

图1 非扫描激光三维成像探测系统组成示意图
信号同步功能是系统能否正常工作的关键。时序控制模块的作用就是提供包括激光器工作时统、激光电源时统以及两路相机的触发时统等同步信号,使系统的各个模块在统一的同步信号控制下协同工作。
增益控制模块能够按照时序同步信号的控制,给两路成像设备提供准确的增益调制信号,为后续的图像信号处理打好基础。
图像处理模块是整个系统的核心。经过增益调制的图像信号由图像处理模块完成包括像素对齐、去噪滤波等预处理,然后按照成像探测实时处理算法进行运算,从而解算出对应像素的距离信息。下面我们将对图像处理模块的设计进行说明。
3 图像处理模块的软硬件设计
非扫描激光三维成像系统的设计指标要求每秒钟完成6幅图像的实时处理、显示和存储。系统采用的成像设备输出图像尺寸为768×576,即每幅图像有约45万个像素点。实际设计采用FPGA+DSP硬件架构,构建了一个双路图像处理平台。系统结构如图2所示。

图2 图像处理模块结构示意图
在图像处理平台中,FPGA的作用是负责图像信息流的传输控制和预处理。包括与两路Camera-Link相机的数据传输控制,实时图像数据的缓存和预处理,与DSP处理单元的数据交换以及VGA显示控制。FPGA采用Altera公司的EP3C40F780,片上有39600个LE逻辑单元,同时集成了126个18×18的硬件乘法器和1Mbits以上的存储单元,可以满足大运算量并行处理算法的设计需要;片上还拥有535根I/O引脚,这些引脚可以支持多种信号模式,具有很强的应用扩展能力。
FPGA内部模块结构如图3所示。
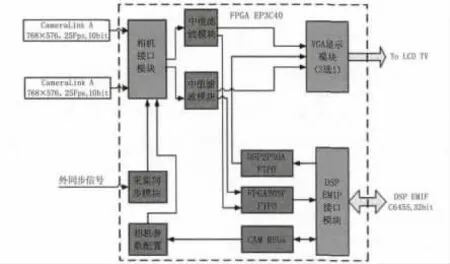
图3 FPGA内部模块结构示意图
由外部CameraLink相机输入的图像数据在外同步信号控制下,由相机接口模块送到中值滤波算法模块进行图像预处理,每一路相机都有自己独立的图像预处理模块。处理完成的数据送到与DSP之间的数据缓存中,然后通知DSP取走数据。图像数据在DSP中完成处理以后,再送回FPGA,交给VGA显示模块进行显示输出。VGA显示模块可以在单路图像数据和处理完成以后的图像数据之间进行选择输出。同时在DSP和FPGA之间还有一路配置参数数据通路,可以按照DSP传递过来的参数对相机进行实时的参数配置,以提高对工作环境的适应性。
DSP采用TI公司的TMS320c6455,负责完成对输入图像数据的实时处理以及处理后图像数据的存储。6455芯片具有单片最高支持1.2 GHz的处理时钟,9600 MIPS数据处理能力;支持64bits外围存储器EMIF接口和独立的DDR2存储控制器,可以高效的完成大容量数据吞吐任务。同时片上还集成了支持10/100/1000M的网络接口,可以方便的扩展实现网络数据传输功能。
DSP部分的软件功能涉及到包括数据输入和高速存储、执行数据处理算法及建立片上数据通讯的网络接口等方面,需要对片上资源在整个数据处理流程中的使用情况进行合理的规划和控制,这对软件设计及片上资源监控和调试提出了较高的要求。我们基于DSP/BIOS嵌入式软件开发工具编写了图像处理部分的软件,通过DSP/BIOS提供的图形化配置工具管理外设和各级任务处理线程,并利用底层应用函数接口调度芯片的软硬件中断。同时DSP/BIOS还提供了多种分析和评估代码工具,可以方便直观的显示代码各个部分的执行时间,资源占用及线程之间的同步和冲突等情况,对于软件资源的调试有很大的帮助。图4是DSP/BIOS的软件开发界面示意图,图5是DSP/BIOS的软件调试界面示意图。

图4 DSP/BIOS的软件开发界面示意图
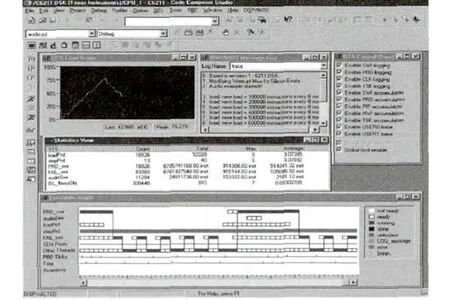
图5 DSP/BIOS的软件调试界面示意图
4 实验结果
非扫描激光三维成像探测系统的工程化样机针对对不同的目标物完成了成像,显示和存储实验,图像处理帧率为6 Hz,成像距离为584 m。我们将每幅图像重复输出,使总体图像显示帧频达到24 Hz,配合了图像显示的需要。图6为非扫描激光三维成像样机实物图。图7为对584 m远处目标所成激光三维距离效果图。图中所反映的距离信息与实际情况一致。
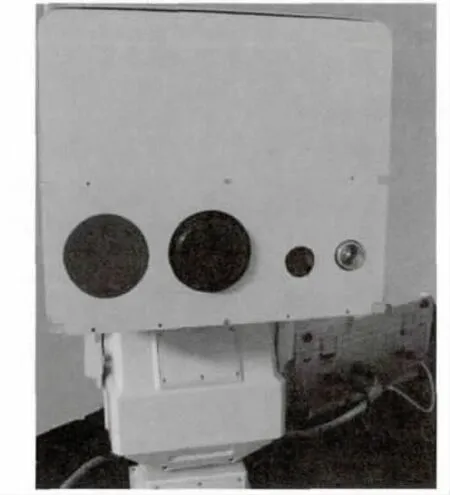
图6 样机实物图
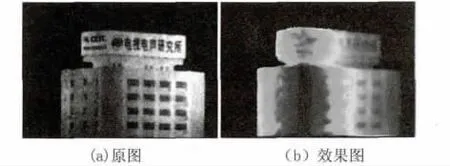
图7 584 m远处目标所成激光三维距离效果图
5 结论及改进措施
按照非扫描激光三维成像探测原理,基于FPGA+DSP的结构设计实现了工程化样机。样机能够以6 Hz成像帧频,完成对采集图像的实时处理,并按照距离远近完成图像的伪彩色显示。但现有样机系统还存在着不足之处,首先是6 Hz不是现有显示系统的标准帧频,为了满足实际需求,需要将成像频率提高到25~30 Hz;其次目前设计的样机系统影响工作性能的主要因素是图像存储模块,由于图像存储模块采用的是网络硬盘,DSP处理模建立网络连接的时间太长,影响了图像处理速度。因此在样机改进方案中,准备将存储和显示功能由独立的处理模块完成,同时保留DSP的网络接口。
[1] ZHOU Runjing,SU Liangbi.Examples of FPGA/CPLD digital system design based on QuatusII[M].Beijing:Publishing House of electronics industry,2013.(in Chinese)周润景,苏良碧.基于Quartus II的FPGA/CPLD数字系统设计实例[M].北京:电子工业出版社,2013.
[2] XIA Yuwen.Digital system design tutorial with Verilog[M].Beijing:Beihang University Press,2008.(in Chinese)夏宇闻.Verilog数字系统设计教程[M].北京:北京航空航天大学出版社,2008.
[3] LI Fanghui,WANG Fei,He Peikun.The principle and application of TMSc6000 DSPs[M].Beijing:Publishing House of Electronics Industry,2003.(in Chinese)李方慧,王飞,何佩琨.TMS320C6000系列DSPs原理与应用[M].北京:电子工业出版社,2003.
[4] PENG Qicong,GUAN Qing.The principle and application of CCS&DSP/BIOS[M].Beijing:Publishing House of elEctronics Industry,2004.(in Chinese)彭启琮,管庆.DSP集成开发环境—CCS及DSP/BIOS的原理与应用[M].北京:电子工业出版社,2004.
[5] LI Qi,WANG Qi.Local Statistics-homomorphic Filter for CO2Laser imaging Radar[J].Laser & Infrared,2002,32(4):230-232.(in Chinese)李琦,王琪.局部统计同态滤波用于CO2激光成像的图像处理[J].激光与红外,2002,32(4):230-232.
[6] LI Ziqin,WANG Qi.Comparison of algorithms for suppressing specklein Laser imaging System[J].Infrared and Laser Engineering,2003,32(2):130-133.(in Chinese)李自勤,王琪.激光成像系统图像散斑抑制算法比较[J].红外与激光工程,2003,32(2):130-133.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
数学小灵通(1-2年级)(2020年9期)2020-10-27
当代贵州(2019年41期)2019-12-13
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
时代农机(2016年6期)2016-12-01
电气化铁道(2016年4期)2016-04-16
中国共青团(2015年7期)2015-12-17
环境科技(2015年4期)2015-11-08