
强阳光反射背景下红外舰船目标自适应分割
2015-03-21 08:53:08陈咸志白志刚曹晓荷罗镇宝金代中
红外技术 2015年9期
徐 倩,陈咸志,白志刚,曹晓荷,罗镇宝,金代中
强阳光反射背景下红外舰船目标自适应分割
徐 倩1,陈咸志1,白志刚2,曹晓荷1,罗镇宝1,金代中1
(1. 西南技术物理研究所,四川 成都 610041;2. 空军驻川西军代室,四川 成都 610041)
针对海面有强阳光反射背景下现有红外舰船目标分割算法效果较差,提出了一种有效的红外舰船目标分割方法。利用均值漂移方法的不连续保持性滤波特性,抑制海面小面积强杂波干扰,同时又不损失舰船目标信息。对滤波后图像做行垂直方向梯度均值投影,获取舰船目标感兴趣区域。最后运用改进的行列均值自适应阈值分割算法,结合使用红外舰船目标的几何特征量达到自动分割的目的。
红外图像;舰船目标分割;均值漂移滤波;梯度特征计算;行列均值分割
0 引言
海空背景下红外舰船目标检测技术是对海侦查、监测等应用领域研究的重点。红外场景中的舰船目标分割一直是国内外极为关注的热点问题[1],因为它是红外制导武器在海面背景下可靠捕获、识别舰船目标的重要基础和前提。
舰船红外成像主要是基于目标的红外辐射特性,其红外辐射源包括太阳、天空、海洋及舰船等。天空的辐射主要是自身辐射和散射太阳光,除了细小的云层干扰以外,天空背景的灰度分布基本比较均匀。从整体来看,海面背景由于海浪的起伏,使得所成的红外图像灰度起伏较大,因而存在较大的杂波,对舰船目标的分割和提取存在严重的干扰。根据海面阳光反射的大小可将海面的干扰程度分为3个等级:弱阳光反射、密阳光反射和强阳光反射[2],在强阳光反射环境中,由于天气状况较好,红外镜头处于逆光拍摄,海面存在大面积的强阳光反射干扰,这给传统的阈值分割带来了困难,分割结果除舰船目标外仍包含部分天空及大面积海面干扰[3-6]。
一维最大类间方差法(也称Otsu法)因其未考虑目标局部的灰度分布情况,因而在复杂场景中无法得到满意的结果[3]。文献[4]采用2维直方图并以最大2维熵为准则进行红外舰船分割,但由于强鱼鳞光杂波边缘与舰船目标边缘响应值相当,分割后除目标外仍包含大面积海面杂波干扰。文献[5]对图像建立区域连接图,采用最小生成树方法得到分类结果,由于海面杂波灰度均匀且分布面积广,目标面积相对更小,因此在有大面积鱼鳞光反射的背景下无法分割出目标,得到的结果反而是鱼鳞光分布区域。文献[6]对小波去噪后图像采用梯度强度均值分割的算法检测出海天线,运用基于行列均值的自适应阈值分割算法检测出红外舰船目标,此方法虽能检测出目标,但在分割后仍包含部分海面鱼鳞光区域。本文对文献[6]分割方法的阈值选取和条件判断做了改进,在强阳光反射背景下可以得到较好的分割结果。
为减少海面、天空干扰和不影响后续的图像分割质量,本文先利用均值漂移算法对红外图像进行预处理;然后利用图像行垂直方向梯度均值投影并寻优得到感兴趣区域,进一步缩小目标分割面积;最后通过改进的行列均值分割实现红外舰船目标分割任务。实验表明:该方法能在强阳光反射背景下有效地抑制天空云层和海面大面积杂波的影响,获得较好的分割结果。
1 图像预处理
均值漂移算法(Mean Shift)可以实现图像的不连续保持性滤波[7],不仅可以滤除图像中的点噪声,而且能够进行区域灰度聚类。将其用于强阳光反射背景下不仅可以降低海面鱼鳞光分散性而且能自适应地减小舰船目标显著边缘平滑,有利于后续目标分割。
均值漂移算法是采用迭代计算的方式,即先算出当前点的偏移均值,移动该点到其偏移均值,然后以此为新的起始点,继续移动,直到满足一定条件结束迭代计算。该算法自应用到图像处理中以来,针对不同应用,出现了多种偏移均值的表达形式,文中采用YiZong Chen[8]的定义形式,偏移均值表示为:
式中:()是一核函数;(x)≥0是一个赋给采样点x的权重;为一常数。
给定初始点、核函数和容许误差均值漂移算法循环的执行下面两步,直至结束条件满足:
1)计算m();
文中将红外舰船目标的空间信息和灰度信息统一考虑,组成特征向量=(s,r),s表示坐标,r表示该坐标上对应的灰度特征;表示颜色通道数,在红外灰度图像中=1;采用高斯核函数估计的分布,其表达形式如下:


由均值漂移算法原理,用均值漂移算法对每一个象素点x=(x, x)进行如下步骤:
1)初始化=1,并且使y,1=x;
2)运用均值漂移算法计算y,j+1,直到收敛,记收敛后的值为y,c;
3)赋值z=(x, y,c)。
考虑到处理时间和处理效果,通过大量试验得到经验值s=8,r=16,=5,可以获得比较好的滤波效果。图1(b)为运用均值滤波算法对典型海天场景图1(a)滤波结果,可以看出在舰船目标附近消除了大量海面鱼鳞反射波及天空云层干扰,同时对海面鱼鳞波和舰船有聚类的效果,使得鱼鳞波分布更集中,有利于将舰船从鱼鳞波中分割出来。
2 ROI获取
提取舰船目标感兴趣区域的传统做法是提取海天线,这在海天线模糊或不存在海天线情况下容易发生误检。当存在海天线时,舰船一般出现在海天线附近(如图2(a)所示),由于天空和海面存在热辐射差,在海天线过渡区域图像垂直方向梯度变化大;当不存在海天线时,海面干扰较小,由于舰船大多呈扁平状、存在吃水线以及舰船附近水纹多出现水平分布,在舰船附近垂直方向梯度变化也较明显。因此无论是否存在海天线,舰船附近区域垂直方向梯度都会有较大变化。
由于强阳光反射背景下一般存在海天线,天空灰度分布比较均匀而海面杂波干扰较强,可以通过检测第一个垂直方向梯度变化较大的行,再上下进行扩展来初步定位舰船区域。图2是图1(b)行垂直方向梯度均值投影图,可以看出在第105行附近垂直方向梯度开始有较大变化,此区域为海天过渡区域;而在105行之后垂直方向梯度变化则更为剧烈,这是由于强阳光反射背景下存在大量鱼鳞光反射的结果。

(a) 原始图像
(a) the original image

(b) 图1(a)均值漂移滤波结果
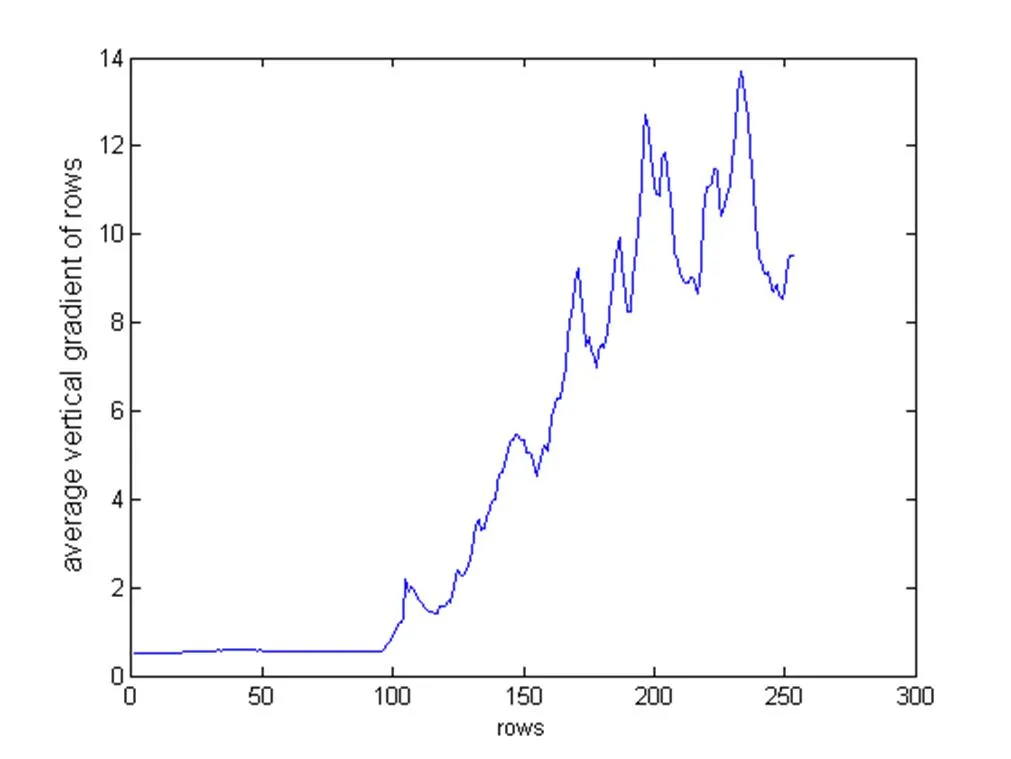
图2 图1(b)行垂直方向梯度均值投影
设图像尺寸为×,(,)是二维数字图像平面上的点,(,)是经均值滤波后图像各点的灰度值。本文针对成像面积具有一定大小(大于5×5像素),且舰船成像高度不超过图像高度1/4的舰船目标进行分割,综合以上分析,可以得出感兴趣区域(ROI)提取方法,步骤如下:
1)将图像与垂直向梯度算子[-1;0;0;0;1]相卷,得到垂直向梯度I(,),并记录于长度为×的数组中;
2)垂直向梯度取绝对值,计算各行行梯度均值,为进一步消除杂波干扰,取相邻3行平均值作为各行行均值,得到行垂直方向梯度均值投影Avg_I(),=0,1,…,-1,并记录于长度为的数组中;
5)提取以下区域为ROI区域:(,),=(-/8),…, (+/8);=0,1,…,。
ROI获取流程图如图3所示,图4为图1(b)提取的舰船ROI。
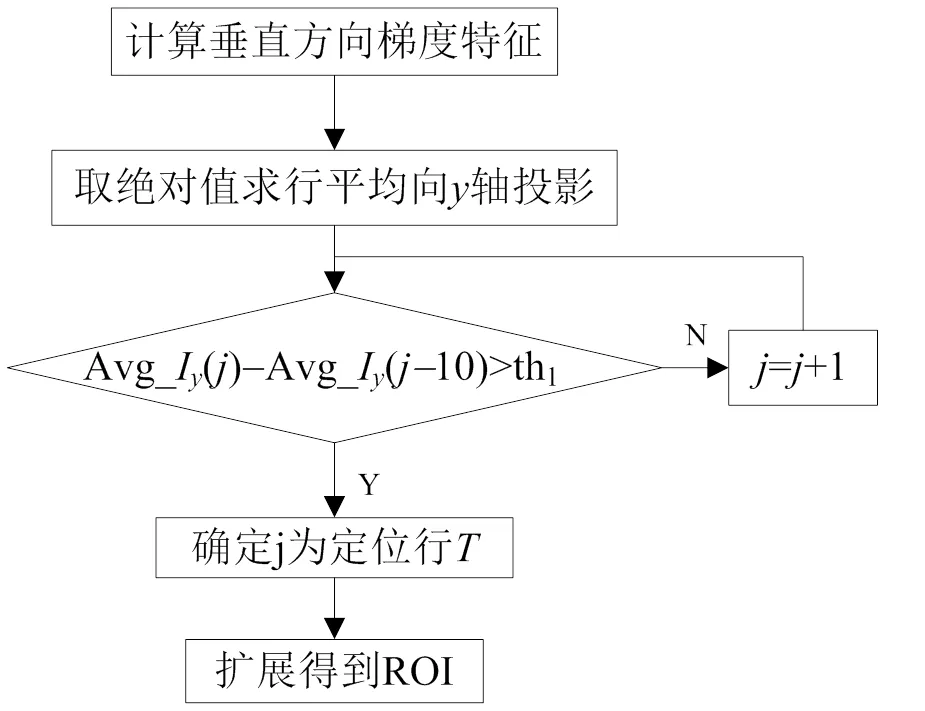
图3 ROI获取流程图

图4 图1(b)提取的舰船ROI(黑色直线为定位行)
3 舰船目标分割
图像分割是一种将图像分割成若干个有意义区域的图像处理技术,其中在分割出的各彼此独立的区域中可能包含潜在目标。图像分割的关键和难点是分割阈值的选取。
传统分割算法(如Otsu阈值分割算法)大多适用于海面背景较简单的场景,对于海面存在大面积强鱼鳞光反射的场景,由于鱼鳞波成像具有一定面积且具有高灰度值,很容易发生误检。分析发现,当天气状况很好且摄像头呈逆光拍摄时,海面会存在大量大面积鱼鳞光反射,此时舰船红外辐射能量通常比海面背景的能量还低,舰船目标成像为暗目标。
杨明月等人针对红外舰船亮目标提出一种基于行列均值的自适应阈值分割算法[6],计算图像各行列的灰度均值。对图像中任意一点,如果其灰度值减去所在行列均值均大于某阈值,则认为该点是潜在的目标区域中的点,并且置为白;否则认为是背景中的点被滤除,置为黑。另外,通过判断分割后面积最大的联通域的面积占图像的百分比,自适应获得最佳分割阈值。但文献[6]的算法存在以下几个不足之处:
1)由于舰船目标面积大小不一,且海面存在大面积强鱼鳞光反射,因此通过判断分割后面积最大的联通域的面积占图像的百分比来确定阈值会存在大面积干扰;
2)阈值用像素来衡量,对于具有不同对比度且海面杂波干扰较强的场景,得到的分割结果将包含大面积的鱼鳞波块;
3)阈值不应设置为全局阈值,图像不同位置处因噪声大小不同应有不同的阈值;
4)由于是海天场景,对于ROI中任意一点,行方向为单一场景(天空背景或海面背景),列方向为复合场景(天空背景和海面背景),因此列方向应比行方向约束更严格,阈值略大。
基于上述不足之处,本文改进了阈值的选取及分割结束条件,提出一种新的基于行列均值分割方法。行列阈值共有5种选择,依次为ROI中各点所在行均值和列均值的1/2、1/2;1/3、1/2;1/4、1/3;1/5、1/4;1/6、1/5,初始行列阈值赋为行均值的1/2和列均值的1/2。由于阈值的合理选取,已消除大量杂波干扰,可通过判断所得分割区域面积大小来最终确定阈值结束分割。
综合以上分析,可以得出求取ROI目标图像分割的方法,步骤如下:
1)计算图像各行灰度均值X;
2)计算图像各列灰度均值Y;
3)给行列分割阈值赋初值:th_r=X/2,th_c=Y/2;
4)对图像中任意一点(,),若X-(,)>th_r且Y-(,)>th_c,则置为白,否则置为黑;
5)判断分割后面积大小,若<50,则相应减小行列分割阈值;
6)重复步骤4)、5),以求得最佳阈值,得到ROI分割结果。
去掉分割图像中面积小于一定值和长宽比超过一定值的连通区域,得到最终ROI分割结果。图5为ROI分割流程图,图6给出了图4分割结果。将ROI分割结果向上下扩展一定零行可得到原始红外图像的目标分割结果。

图5 分割流程图

图6 图4分割结果
4 实验结果与分析
采用文中提出的舰船目标分割方法,对实际拍摄的强阳光反射背景下红外舰船图像进行了实验,图像大小为320×254,如图7所示,图7(a)、(b)为强鱼鳞光反射背景,图7(c)为稠密鱼鳞光反射和黑带干扰的场景。本文算法对这3种不同场景分割结果如图8所示。实验中本文选取了Otsu[3]和文献[6]算法进行了结果对比,由于Otsu和文献[6]算法必须在已知目标和背景能量强度关系的前提下进行分割,因此在对图7进行分割时假设已知图像中目标灰度低于背景,设定阈值分割小于背景灰度的像素;图9是Otsu分割结果,图10是文献[6]算法分割结果。
从实验结果中可以看出,本文算法在场景中存在强鱼鳞光反射、稠密鱼鳞光反射和带状干扰时,均能准确分割出舰船区域;而Otsu方法对3种场景均无法分割出目标,目标完全淹没在海面和天空噪声中;文献[6]算法虽然能分割出目标,但由于海面存在较强干扰,分割结果仍包含大量海面噪声,无法获得较好的分割结果。这是由于这两种方法阈值均为全局阈值,在海面存在大面积鱼鳞波干扰时,由于海面杂波灰度特性与舰船目标相近,分割结果包含大面积海面杂波。本文算法通过自适应设定局部阈值,保留目标的同时抑制海面杂波,可以在不同的实验图像中获得相对较好的结果。
5 结论
海面舰船目标分割对于舰船目标自动检测和识别以及跟踪有重要意义。本文从工程应用中针对海面有强阳光反射时现有算法分割效果较差出发,通过均值漂移方法抑制海面部分强杂波干扰,再对图像做行垂直方向梯度均值投影,获取舰船目标感兴趣区域,运用改进的行列均值自适应阈值分割算法,结合使用红外舰船目标的几何特征量达到自动分割的目的。该方法物理意义明确,对不同场景有很好的适应力,并能较好地抵抗大面积鱼鳞光干扰、水面带状干扰、强杂波等干扰,具有一定的工程应用价值。然而需要指出的是,当舰船目标为亮目标时,算法须作相应改进,如何让算法自适应地分割出双极性目标,这是今后需要进一步完善和提高的地方。
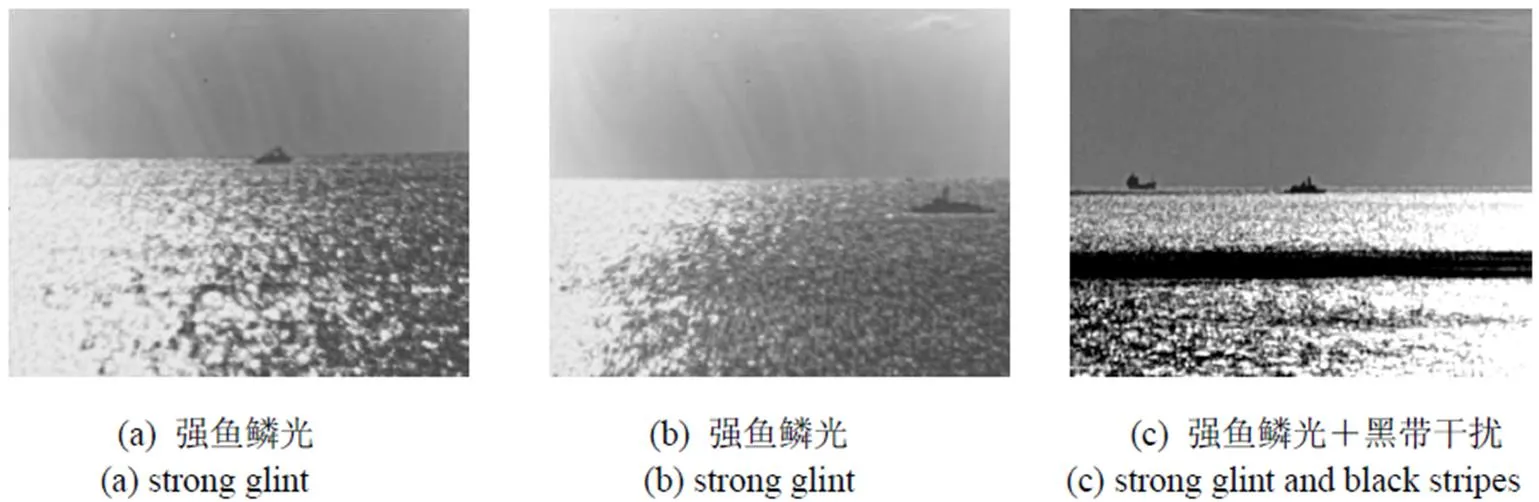
图7 强阳光反射背景实验图像
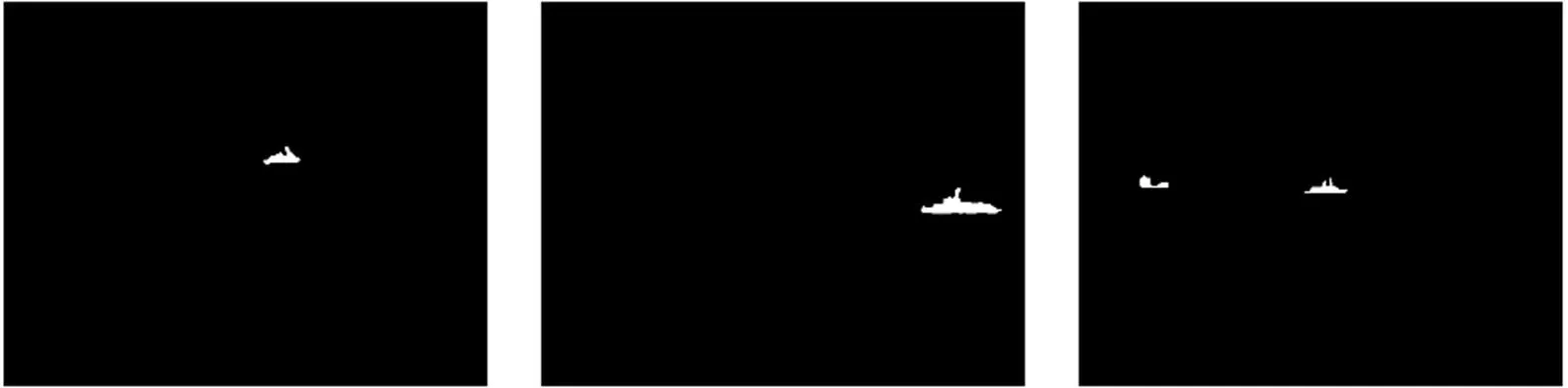
图8 本文算法分割结果
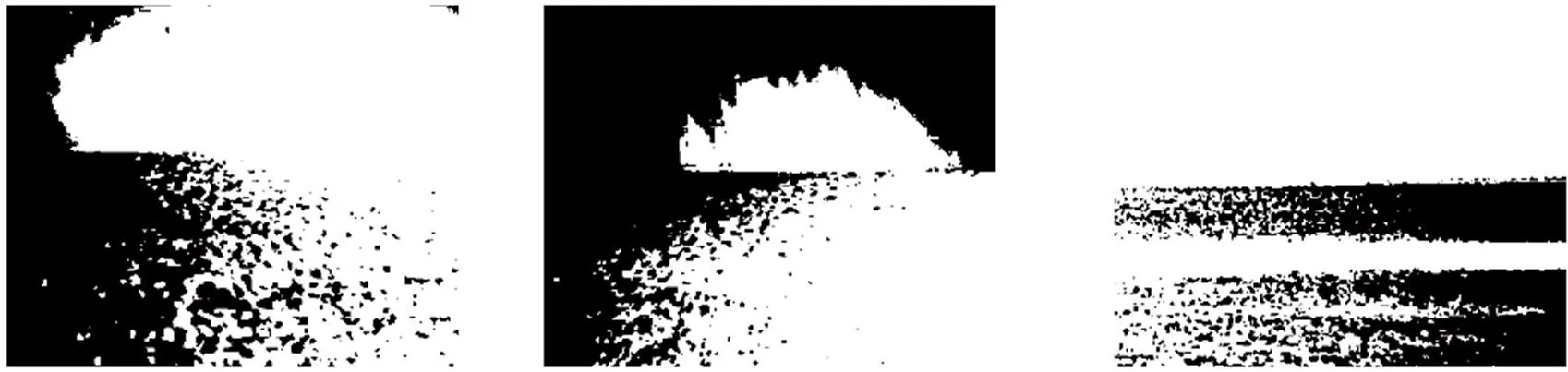
图9 Otsu分割结果
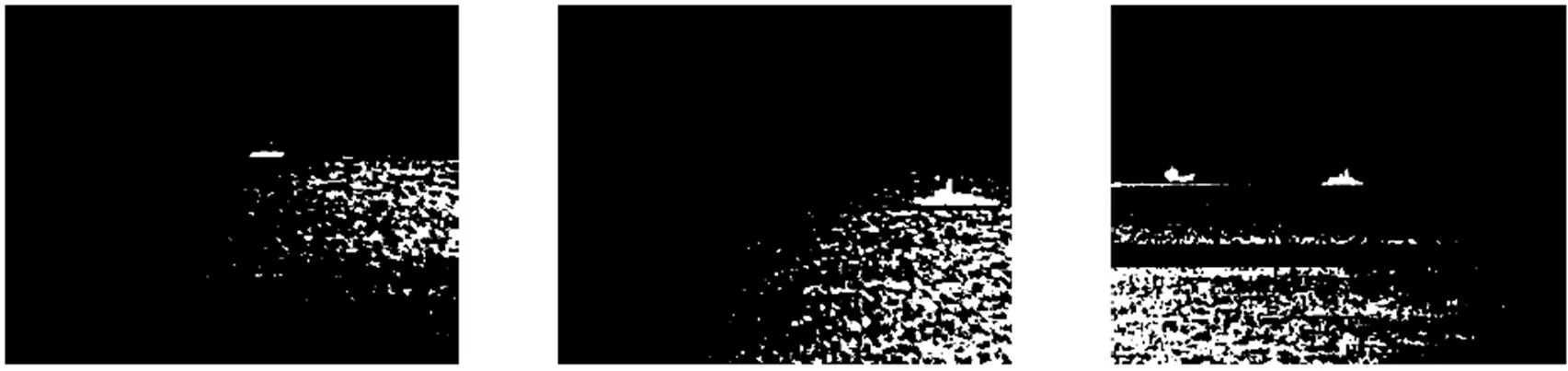
图10 文献[6]算法分割结果
[1] 陈钱. 红外图像处理技术现状及发展趋势[J]. 红外技术, 2013, 35(6): 311-318.
Chen Qian. The status and development trend of infrared image processing technology[J]., 2013, 35(6): 311-318.
[2] Kim Sungho, Choi Byungin, Kim Jieun, et al. Three plot correlation- based small infrared target detection in dense sun-glint environment for infrared search and track[C]//, 2013, 8393: 83930T1-7.
[3] 邢莎, 吉林, 雍杨, 等. 复杂场景下的自动红外舰船目标检测[J]. 红外技术, 2014, 36(4): 320-325.
Xing Sha, Ji Lin, Yong Yang, et al. Automatic infrared warship target detection under complicated background[J]., 2014, 36(4): 320-325.
[4] 赵菲, 卢焕章, 张志勇. 自适应双极性红外舰船目标分割算法[J]. 电子与信息学报, 2012, 34(10): 2432-2438.
Zhao Fei, Lu Huan-zhang, Zhang Zhi-yong. Adaptive bilateral polarity ship segmentation in infrared images[J]., 2012, 34(10): 2432-2438.
[5] 陶文兵, 金海. 基于均值漂移滤波及谱分类的海面舰船红外目标分割[J]. 红外与毫米波学报, 2007, 26(1): 61-64.
TAO Wen-Bing, JIN Hai. Ship infrared object segmentation based on mean shift filtering and graph spectral clustering[J]., 2007, 26(1): 61-64.
[6] 杨明月, 杨卫平. 复杂海天背景下红外舰船目标的自动检测方法[J]. 红外与激光工程, 2008, 37(4): 638-640.
Yang Ming-yue, Yang Wei-ping. Automatic detection method of IR warship target in the complex sea-sky background[J]., 2008, 37(4): 638-640.
[7] Comaniciu D, Meer P. Mean shift: A robust approach toward feature space analysis[J].. 2002, 24(5): 603-619.
[8] Cheng Yizong. Mean shift, mode seeking, and clustering[J].. 1995, 17(8): 790-799.
Adaptive Infrared Warship Target Segmentation in Strong Sun-glint Environment
XU Qian1,CHEN Xian-zhi1,BAI Zhi-gang2,CAO Xiao-he1,LUO Zhen-bao1,JIN Dai-zhong1
(1.,610041,; 2.,610041,)
The traditional segmentation algorithm for infrared warship target effects poorly in dense or strong sun-glint sea-based environment. This paper presents a novel adaptive threshold segmentation algorithm to solve the problem. At first we filter an original image using mean shift technique and considering it’s discontinuity-preserving smoothing property so that we can cluster the small-sized strong sun-glint away from the warship target. Then we get the ROI by projecting the average vertical gradient of each row. Finally, we achieve the goal of automatic ship segmentation by the modified adaptive threshold segmentation algorithm based on the mean of each row and column. Furthermore, we extract several regional geometry characteristics to further suppress sun-glint interference.
infrared image,warship target segmentation,mean shift filter,gradient computation,mean of image rows and columns
TP391.4
A
1001-8891(2015)09-0728-05
2014-11-13;
2015-02-13.
徐倩(1988-),女,汉族,四川省广安市人,硕士,主要研究方向:目标检测与识别。E-mail:13981715993@163.com。
陈咸志(1974-),男,重庆市人,研究员,主要研究方向:光电图像制导。
国家“863”计划重大项目,项目编号:2012AAXXX2012X。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
作文新天地(小学版)(2022年8期)2022-05-30 04:30:04
红蜻蜓·低年级(2021年2期)2021-07-20 04:48:09
舰船科学技术(2021年12期)2021-03-29 01:28:44
小学科学(2020年6期)2020-06-22 13:13:41
趣味(语文)(2018年8期)2018-11-15 08:53:02
小学生导刊(2017年18期)2017-05-17 05:44:37
快乐作文·低年级(2017年3期)2017-03-25 08:45:58
饮食保健(2017年9期)2017-02-27 09:13:42
学生天地(2016年6期)2016-04-16 05:14:32
