基于SEWES 的机载传感器建模与仿真*
2015-03-18 05:50王世涛
电讯技术 2015年1期
王世涛,马 霞
(1.海军装备部驻重庆地区军事代表局,重庆400042;2.中国西南电子技术研究所,成都610036)
1 引 言
在航空领域,仿真技术已成为研制飞行器及其搭载设备的必备手段之一,取得了很高的军事效益、经济效益以及社会效益[1-3]。近年来,随着军事对抗系统的日益复杂,平台装备的传感器功能不断提高,种类不断增加,军用仿真系统正朝着高度集成化和模块化的方向发展,高精度、高准度的传感器模型成为保证军用仿真系统可信性的关键因素。
仿真系统的核心是仿真体系结构,它从全局角度上描述仿真系统各个单元的功能、结构以及不同单元之间的物理与逻辑关系,指导仿真系统的设计、实现与使用。目前,最常用的仿真体系结构是DIS和HLA[4]。基于DIS 的仿真系统主要由仿真节点和计算机网络组成,其中,仿真节点负责仿真实体的运算与推进,计算机网络负责仿真实体状态和事件信息的传递。DIS 体系结构具有逻辑清晰、实现简单等优点,但它是以广播方式进行信息传递,往往导致网络负载过大和时空不一致。基于HLA 的仿真系统主要由联邦成员和运行支撑环境RTI 组成,不同邦员之间按照接口规范进行互操作。HLA 体系结构采用客户/服务器方式进行信息传递,提高了网络带宽的利用率,并且具有很好的开放性、可重用性、可扩展性,但是实时服务的性能较差。更重要的是,由于DIS 和HLA 均侧重于通用化、标准化,从而无法很好地满足具体领域的特定需求。因此,本文开发航空传感器仿真系统时采用了更具专业背景的SEWES 平台。
南非科技与工业研究院(CSIR)开发了一个基于Matlab 与Simulink 环境[2]的多对多传感器和电子战仿真系统(Sensors & Electronic Warfare Engagement Simulator,SEWES),它可实现多个武器平台在同一个仿真环境中进行对抗,且每个武器平台可根据需要配置多种传感器和电子战系统。SEWES 平台可以选择陆上、海上或空中平台,每个平台都有自己的管理中心,由它来控制不同仿真模块之间的信息交互。SEWES 平台内的模型长期被CSIR 所使用,其可信性在多个武器装备研制过程中得到过充分的验证。本文基于SEWES 架构,重点研究应用于空战场景仿真的四类平台和系统模型,分别是飞机平台模型、机载相控阵雷达模型、机载电子战系统模型和射频环境模型。在此基础上,构建了一套航空传感器仿真系统,用以支撑机载综合射频传感器的作战需求分析及型号研制。
2 系统模型结构
在SEWES 平台上,所有系统模型的顶层结构是固定统一的,如图1所示。每个平台均有一个平台指挥与控制(PCC)单元,它集成了该平台所有系统模型相应的系统指挥与控制(SCC)模型,从而达到指挥和控制本平台内所有模型的目的。PCC 单元所发指令通过系统控制器(SC)发送给系统模型,这种链路通信是基于事件的。仿真中不同事件均以时间为基础,系统模型通过参与到特定次序的事件中按其开始时间被触发运作。SC 的核心是一个状态机,它以“状态流”的方式运行,模型执行的不同阶段都受其控制和安排。不同模型对应状态机的特定实现可以不同。数据获取单元用于获得当前系统模型处理所需的来自其他系统模型的数据。例如,当前系统是导弹,它需要自身平台的位置信息和射频目标的射频信息。系统模型单元是每种特定系统模型的算法实现。除了模型本身应含的内部功能外,它还应具备以下通用功能:一是连接到PCC 单元响应被要求的指控信息,如模型启动、与其他模型执行同步、从其他模型请求和接收数据、向仿真记录与显示(SLD)单元发送系统模型输出;二是连接到SLD单元;三是停止仿真。SLD 单元实现系统模型与外部独立显控系统(场景内所有系统数据都在此集中记录和显示)之间的通信,它必须按照前端PCC 要求的时间和内容实现数据输出。请求响应单元是处理其他系统模型通过其自身的数据获取单元向当前模型发出的所有数据支撑请求,例如平台模型通过该部分给导弹模型提供导弹发射的位置信息。

图1 系统模型顶层结构图Fig.1 The top structure of system model
3 系统模型设计
3.1 飞机平台模型
在SEWES 中,飞机平台模型提供规定的飞机平台参数信息,如位置、速度、加速度等,它包括六自由度运动、自动驾驶仪、雷达散射截面(RCS)计算等模块。
六自由度运动模块根据飞行力学计算飞机实时受力情况和飞机实时位置、姿态。六自由度运动分别为沿X 轴(东)、Y 轴(北)、Z 轴(天)的直线运动和绕X 轴(俯仰)、Y 轴(横滚)、Z 轴(航向)旋转的运动,工作原理为质心动力学方程和绕质心转动动力学方程。
自动驾驶仪主要完成两个功能:一是根据外部输入的控制信号计算飞机的控制力;二是根据飞机的受力对飞机进行姿态控制,使飞机平稳飞行。它包含力控制和力矩控制两个控制回路,均采用比例积分控制器进行控制,其中力控制器的输入为X、Y、Z 的速度偏差控制量,力矩控制器的输入为横滚角偏差控制量。
RCS 计算模块根据接收到的射频信号,结合飞机的姿态等信息,计算飞机到雷达的视线角,进而计算飞机RCS,并产生回波信号。这里RCS 特征数据是通过在给定方位角、俯仰角的条件下查表获得的。而表征飞机动态信号行为的RCS 波动是采用负指数分布(或称瑞利功率)进行建模,具体公式为

回波信号功率Pr=Piσ,其中Pi为雷达的发射功率。
3.2 机载相控阵雷达模型
20世纪90年代末,世界上第一部有源相控阵机载火控雷达AN/APG-77 研制成功,装备在美国新一代战机F-22 上[5]。本文以机载雷达APG-77 的系统功能及性能为参考,采用层次化的方法建立机载相控阵火控雷达系统的仿真模型,实现雷达从发射波形的选择到目标回波的接收、信号和数据处理的全过程系统仿真。
图2给出了机载相控阵雷达系统模型的基本功能模块、输入输出以及信息流程。它是一个具有自适应功能的闭环系统,接收外部系统导入的雷达初始化参数及实时信息数据,进而对目标检测、搜索、多目标跟踪以及波束调度功能进行信号级仿真。

图2 相控阵雷达系统模型功能结构图Fig.2 The functional diagram of phased array radar system model
(1)波束调度模块
实现目标搜索、跟踪的波束调度管理;实现雷达发射信号的波形、PRI、带宽、脉宽等模板选择;根据外部输入的雷达发射信号功率控制参数实现自适应功率控制或功率分级;实现多种工作模式(RWS、TAS、MTT、STT、VSR 等)的正常运行及其之间的正常切换;实现雷达内部时间管理和推进。
(2)天线模块
根据外部输入的天线增益(主瓣增益和平均旁瓣增益)、天线波束宽度和方阵阵元数等参数计算天线方向图;从文件读取天线方向图数据,并根据当前波束指向和目标位置计算相应的天线增益值。
(3)发射机模块
根据外部输入的发射信号功率、信号频率、脉组频率捷变、频率捷变点数等参数模拟雷达发射机功能,并根据实际背景自适应地选择信号类型及该类型下的具体参数,产生脉冲并将脉冲发送至想定中。它包含线性调频信号、多相编码信号、目标回波等子模块。
(4)接收机模块
根据接收机噪声系数、接收机带宽、接收机增益等参数模拟接收机对目标回波信号功率的放大和接收机热噪声功率。它包含中频放大器模块、相位检波器模块、具有相位噪声的振荡器产生模块、IQ 解调器、STC 模块、本振信号等子模块。
(5)信号处理模块
根据检测因子、恒虚警概率、目标回波信号功率、系统热噪声功率等计算信噪比和目标检测概率,并将检测概率与0~1 均匀分布的随机数作比较,判定雷达是否发现目标。若雷达检测到目标,则根据误差模型计算当次检测目标的误差,并与目标真实位置数据进行叠加,得到目标的量测值(点迹)。
(6)数据处理模块
根据外部输入的数据处理滤波算法参数,选择相应的滤波器实现相控阵雷达对多目标跟踪,输出目标航迹数据的同时预测目标下一跟踪周期的位置,向波束调度模块发出目标跟踪、确认和小搜请求。
3.3 机载电子战系统模型
考虑到整个电磁环境中雷达信号的复杂性、波形的多变性、工作频段宽且部分重叠、时域内信号密集等特点,本文将电子战系统模型分为两个部分:电磁信号合成仿真模型与电磁信号分析处理仿真模型,其中后者又分为机载无源探测(ESM)与机载有源干扰(ECM)两个信号处理子系统,如图3所示。
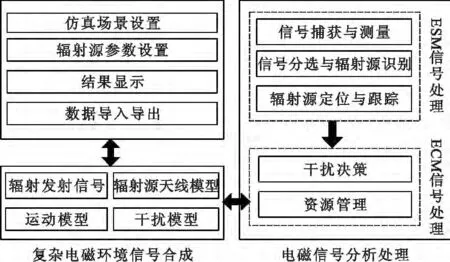
图3 电子战系统模型功能结构图Fig.3 The functional diagram of electronic warfare system model
电子战系统模型的重点是ESM 系统模型,它的输入为想定飞机平台信息与电磁信息,运行流程如下:首先对接收信号进行检测,并对满足截获条件的信号进行参数(方向、频率、到达时间和脉冲宽度)测量,形成对信号的参数描述;然后根据各型雷达信号特征(主要依托辐射源数据库),对实时PDW 信号流进行辐射源分选;最后输出PDW 及信号分选识别信息,并在此基础上对辐射源进行定位跟踪,从而实现机载无源探测从天线、接收机到信号处理的全过程参数级仿真。
3.4 射频环境模型
射频环境模型作为SEWES 一个子系统,用于模拟典型的发射机-接收机系统中的电磁波传播效果,并与所有的发射机和接收机模型进行交互,组成一个逼真的自然环境系统。它的输入有本机平台的运动及姿态参数、目标平台的运动及姿态参数、飞机发射机射频信号参数,另外还包括模型内部计算出来的射频数据。它的输出是一组包含目标平台的运动及姿态参数和通过单径、多径和杂波模型计算出来的射频信号参数,表现形式为一个杂波功率的数组。
SEWES 中射频环境模型是利用MATLAB 工具箱开发的参数级模型,包括目标信息处理模型和发射机、接收机射频传播模型两大部分。目标信息处理模型根据输入的平台位置信息、源位置信息和雷达输入信号来计算目标源的RCS,再通过多径效应计算出射频环境中接收机需要接收到的射频信号。发射机、接收机射频传播模型主要功能是通过输入的RF 发射机信息、RF 接收机信息、源位置信息和目标位置信息,并根据外部系统指定的地形类型和视线的DTED 数据计算出RF 接收机输出信息。另外,输入的RF 发射机信息通过单径、多径以及杂波模型计算出相应的RF 发射机输出信息。同时,该模块还可根据坐标计算出本机和目标之间的距离与速度。
射频环境模型包含6 个子模型,分别为表面杂波模型、自由空间衰减模型、多径效应模型、多普勒频移模型、相移和时延模型以及RCS 计算模型。射频环境模型通过这些子模型和相应的地形和环境来计算飞机、传感器、地面等目标之间的射频信号衰减、相移、时延以及杂波等指标,具体数据流程如图4所示。

图4 射频环境系统模型功能结构图Fig.4 The functional diagram of RF environment system model
4 系统模型应用
为了验证本文所给模型的可信性与实用性,我们在SEWES 平台上建立了一套仿真演示系统,如图5所示。SEWES 平台在剧情制作方面非常便捷,它通过想定编辑软件采用人机互动的方式完成作战平台的部署、系统模型的加载、属性参数的设置、平台航路的规划以及计算机蔟资源的分配等。SEWES 架构是分布式的,它不对系统(如飞机、舰船、干扰机、导弹)中的单个实体独立建模,而是每个实体模型均对应独立的Simulink 模板文件,这样设计的好处是仿真中平台以及每个平台上系统模型都可以很方便地升级和扩充数量。这些分开的模型利用以太网TCP/IP 进行通信。为了控制仿真执行,主时间控制器(MTC)把不同模型的执行进行同步,这是非常有必要的,因为不同模型的仿真步长往往不同。在每次仿真推进过程中,MTC 均需等待所有模型仿真完毕后,再触发推进节拍。

图5 仿真场景3D 实现图Fig.5 The 3D simulation scene
该演示系统包括主控机和运行机两种平台。主控机上产生仿真时钟,并通过通信模块与运行机中的时钟控制进行同步,同步信号同时送至平台、传感器、射频环境等模型,实现系统的同步控制。运行机主要负责模型实体的运算,它接收系统的同步时间信号,推进系统向前推演,并将生成的结果数据通过通信模块发送到主控机和其他需要交互的运行机。例如,飞机平台模型按照仿真时刻来输出平台的运动信息,并将运动信息输入至相控阵雷达、电子战系统等传感器模型,执行传感器模型的运算,产生相应的探测信息、辐射信息。探测信息通过通信模块输送到指定模型,辐射信息首先输入到射频环境模型中进行衰减、多径等处理,再通过通信模块发送至指定模型。
5 结束语
相比HLA 与DIS,SEWES 在航空传感器建模仿真方面具有显著的优势。本文基于SEWES 开发了一套航空传感器仿真系统,分别对飞机平台、机载雷达、机载电子战系统和射频环境进行了参数级建模,并建立了典型的红蓝双方空战集成环境,有力支撑了机载综合射频传感器的作战需求分析及型号研制工作。目前,SEWES 还不为国内航空传感器领域所熟知,本文进行了这方面的研究工作,意在抛砖引玉。另外,SEWES 平台功能强大,但仍缺乏合理、高效、统一的建模规范,本文在SEWES 应用过程中积累了大量经验,制定了模型框架、模型编码、模型接口等方面的初级规范,后续将对上述规范进行完善,以进一步推动SEWES 在航空传感器仿真中的应用。
[1] 蔡文新,蔺云,蒋东.L 频段机载腔体双频滤波器协同仿真设计[J].电讯技术,2014,54(4):491-495.CAI Wenxin,LIN Yun,JIANG Dong.Cosimulation Design of L- band Cavity Dual- passband Filters for Airborne Applications[J]. Telecommunication Engineering,2014,54(4):491-495.(in Chinese)
[2] 睢志佳,程咏梅,杨峰,等.基于HLA 的机载多传感器探测仿真系统设计与实现[J]. 系统仿真学报,2012,24(6):1212-1217.SUI Zhijia,CHENG Yongmei,YANG Feng,et al. Design and Realization of Airborne Multi-sensor Simulation Detection System Based on HLA[J].Journal of System Simulation,2012,24(6):1212-1217.(in Chinese)
[3] 刘翠海,王文清,刘中华. 基于VC + +的战术数据链通信仿真系统设计与实现[J]. 电讯技术,2013,53(7):899-903.LIU Cuihai,WANG Wenqing,LIU Zhonghua. Design and Implementation of a Tactical Data Link Communication Simulation System Based on VC + +[J]. Telecommunication Engineering,2013,53(7):899- 903. (in Chinese)
[4] 陈西选,徐珞,曲凯,等.仿真体系结构发展现状与趋势研究[J].计算机工程与应用,2014,50(9):32-36.CHEN Xixuan,XU Luo,QU Kai,et al.Research on Simulation Architecture Development State and Trends[J].Computer Engineering and Applications,2014,50(9):32-36.(in Chinese)
[5] 刘华翔,朱荣昌.F-22 机载火控雷达系统研究[J].飞机设计,2003(3):42-46.LIU Huaxiang,ZHU Rongchang. An Analysis Study on F-22 Airborne Fire Control Radar System [J]. Aircraft Design,2003(3):42-46.(in Chinese)
猜你喜欢
汽车工程师(2021年12期)2022-01-17
纺织科学研究(2021年1期)2021-12-03
军民两用技术与产品(2021年12期)2021-03-09
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
电子制作(2019年15期)2019-08-27
时代英语·高一(2019年1期)2019-03-13
小学生学习指导(低年级)(2018年12期)2018-12-29
电子制作(2016年1期)2016-11-07
腹腔镜外科杂志(2016年9期)2016-06-01