一种基于MODIS影像可业务化运行的巢湖水体叶绿素a估算算法*
2015-03-17 08:35段洪涛张玉超马荣华
湖泊科学 2015年6期
陶 慜,段洪涛,齐 琳,张玉超,马荣华
(1: 中国科学院南京地理与湖泊研究所湖泊与环境国家重点实验室,南京 210008;2: 中国科学院大学,北京 100049)
一种基于MODIS影像可业务化运行的巢湖水体叶绿素a估算算法*
陶 慜1,2,段洪涛1,齐 琳1,2,张玉超1,马荣华1
(1: 中国科学院南京地理与湖泊研究所湖泊与环境国家重点实验室,南京 210008;2: 中国科学院大学,北京 100049)
现有水色卫星主要是针对大洋清洁水体设计,内陆浑浊水体多数波段经常饱和;而发展可以业务化运行的内陆水体叶绿素a算法,为生产实践服务,一直是水色遥感的重点和难点之一. 利用2013年巢湖星地同步数据(N=55),通过经验正交函数(empirical orthogonal function,EOF)分析方法,选用MODIS唯一不饱和的4个波段(469、555、645、859 nm)数据进行分解,然后回归建模;并使用第三方独立的巢湖实测数据(N=40)进行验证(R2=0.63,URMSE=85.46%). 结果表明:该算法用于MODIS影像上,空间分布合理,季节差异明显,且在高悬浮物水体、不同气溶胶条件下均有很好的抗扰动性. 实践证明EOF算法可以应用于业务化运行的内陆水体叶绿素a浓度估算,并对其他水色参数反演具有一定的借鉴意义.
业务化运行; 叶绿素a; MODIS; 经验正交函数; 内陆水体; 巢湖
巢湖位于安徽省,是我国第5大淡水湖,是长江中下游重要的淡水资源和生态湿地[1],在当地人民生活和经济发展中发挥着重要的作用. 近年来,随着巢湖流域经济的快速发展,大量点源、面源污染物进入水体,巢湖水质污染严重;另外,巢湖闸、裕溪闸等的修建使巢湖逐渐成为半封闭水域[2],水体自净功能逐渐丧失,巢湖富营养化情况日益严峻. 为了保证巢湖水质安全和流域经济可持续发展,亟需加强水质状况的实时监测. 卫星遥感具有大范围、周期性和快捷性等特点,已成为湖泊水质实时监测的重要手段. 叶绿素a(Chl.a)是所有藻类的共同色素,是表征湖泊水质变化程度的重要指标. 因此,利用卫星遥感定量估测Chl.a浓度,可以很好地评估湖泊水质,具有重要的科学价值和实际研究意义.
对于内陆水体Chl.a浓度的估算方法,以水体辐射传输理论和流体力学为基础的生物光学模型[3],可以很好地解释水体中生物光学机理问题. 但由于内陆湖泊等Ⅱ类水体物质来源复杂,水体间光学特性差异较大,并且卫星数据波段数量很有限,导致这种方法很难直接应用于卫星上,因此无法实现业务化运行. 而针对Chl.a吸收或者反射峰,提取相关峰值信息的形状指数模型(MPH、FLH算法),已证实具有很大的潜力并且能够很好地应用于卫星上. 如Hu等基于SeaWiFS和MODIS三波段差值提出的OCI算法,改变NASA近40年来一直延续使用的算法(OC1-4),2014年被NASA采用作为所有水色卫星传感器(MODIS、VIIRS、MERIS、SeaWiFS、CZCS、OCTS)的标准算法[4]. 但卫星遥感数据中特征波段的缺失导致这类算法无法使用,这些算法的应用在很大程度上受限于大气校正的效果. 除了以上的半经验和半分析算法,近年来一些人工智能模型也应用到Chl.a浓度反演上,包括神经网络模型[5]、支持向量机算法[6]、经验正交函数(empirical orthogonal function,EOF)分解算法等,这类人工智能类算法只分析数值变化的特点,对波段并无特殊要求;并且基于实测光谱EOF分解的研究成果表明,该方法在反演沿海Chl.a浓度的应用效果良好[7].
目前常用于水色遥感的卫星传感器主要包括SeaWiFS、MERIS、MODIS等[8]. 考虑到巢湖等长江中下游湖泊多为浅水湖泊,平均水深只有2.69 m,由于受风浪等影响容易引起沉积物再悬浮,一天之内水质(特别是Chl.a浓度)变化较大,对于卫星数据时相要求较高;而MODIS一天之内过境2次,数据获取较为容易,便于业务化监测湖泊水质,是在轨传感器中相对理想的数据源[9]. 需要说明的是,MODIS Terra/Aqua传感器海洋波段主要针对大洋清洁水体设计,比较敏感,在内陆浑浊水体中多数波段经常饱和[4],大气校正(主要是气溶胶校正)困难,导致无法获得足够的波段及其遥感反射比数据. 事实上,目前还没有完全适用于内陆浑浊水体的传感器.
本文以巢湖为研究区,尝试利用MODIS只经过瑞利校正的反射率数据(rayleigh corrected reflectance,Rrc),不依赖于多数算法中常用的Chl.a特征峰波段,而是用纯粹的EOF分解技术,揭示Rrc数据的变化模式,构建一种能够业务化运行的巢湖水体Chl.a浓度反演算法. 由于瑞利校正后得到的巢湖地区Rrc波段较少,只有4个波段(469、555、645、859 nm);因此,针对没有去除气溶胶影响的Rrc数据,利用对波段数量要求不高的EOF分解方法进行Chl.a浓度业务化反演,也许是目前比较有效的一种解决方法.
1 数据与方法
1.1 研究区概况
巢湖(31°25′28″~31°43′28″N, 117°16′54″~117°51′46″E)地处安徽省中部,位于长江流域下游,是我国五大淡水湖之一(图1). 巢湖水域面积约769.55 km2,平均水深2.69 m,多年平均水位8.37 m,蓄水量20.7×108m3[1]. 受当地经济快速发展的影响,巢湖水域富营养化问题严重,蓝藻水华频繁暴发.
1.2 实测数据采集与处理
1.2.1 水样采集 2013年5-10月期间,在巢湖分别进行5次野外实验,具体日期和样点分布如图1所示. 每个样点采集表层水样用于化学分析,同时测量透明度和光谱,并利用GPS记录采样位置和采样时间等辅助数据.
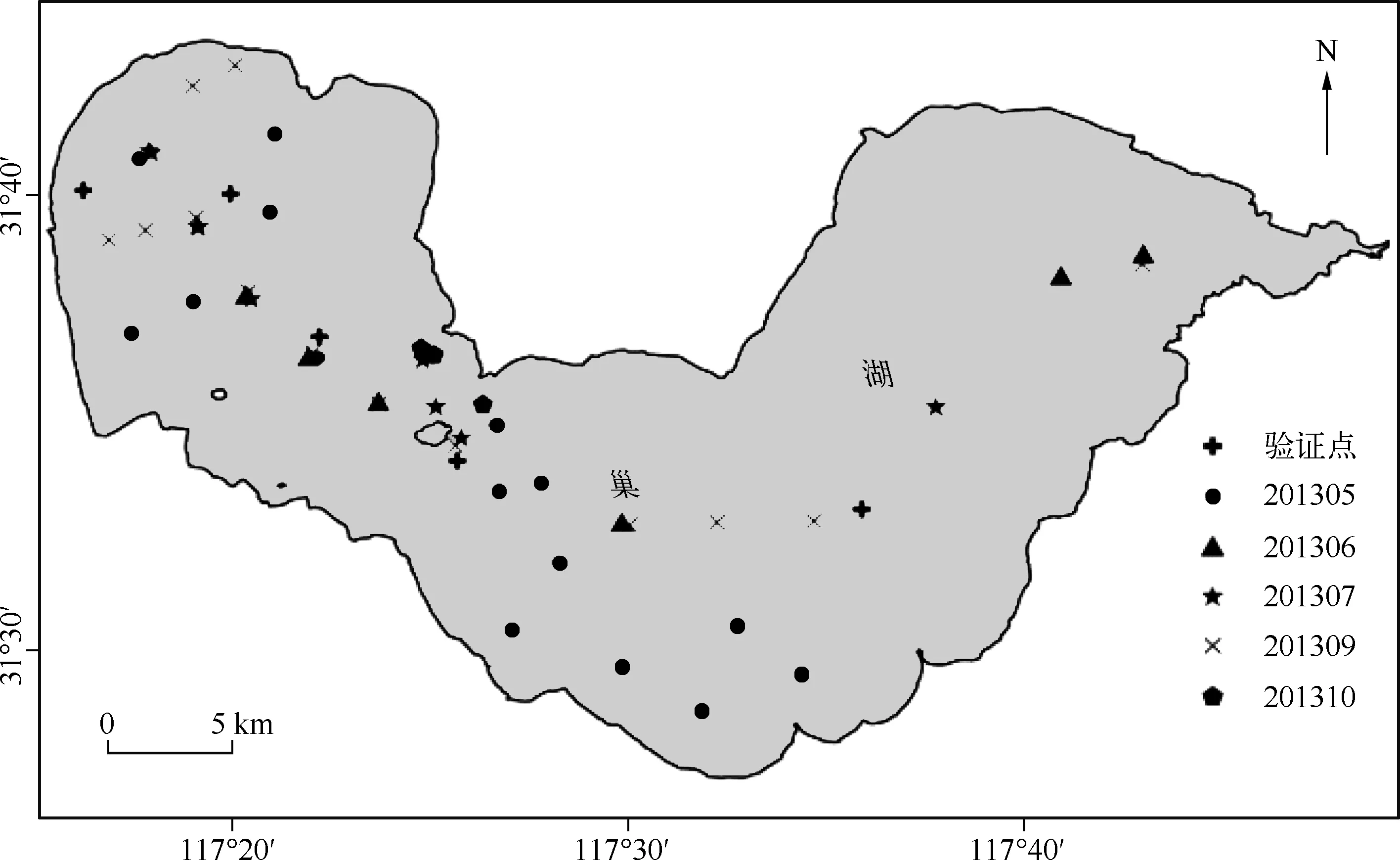
图1 巢湖水体采样点位置分布Fig.1 Spatial distribution of sampling sites in Lake Chaohu
1.2.2 水质参数分析 水体经1.2 μm的Whatman GF/F玻璃纤维膜过滤后避光保存,使用液氮反复冻融3次后,加入90%丙酮溶液避光提取12~15 h,离心后采用分光光度法测定Chl.a浓度[10]. 悬浮物采用称重法测定. 用0.7 μm的Whatman GF/F滤膜过滤水样后,烘箱105℃条件下烘4~6 h后称重并减去膜重,得到总悬浮物(SPM)浓度[11-13].
1.3 MODIS 卫星数据收集与处理
MODIS卫星数据处理主要分为3步:① 从NASA网站上选取与实测叶绿素同步的0级数据,然后进行辐射定标得到L1B数据;② 利用SeaDAS软件去除气体吸收(臭氧吸收)和瑞利散射(分子效应)的影响,从而得到瑞利校正后的反射率数据;③ 根据实测采样点的经纬度位置信息,提取实测采样点对应的Rrc数据,每个Rrc数据都通过3×3窗口检验,以减少杂散光的影响并保证空间同质性[14].
由于巢湖水体较为浑浊,MODIS水色波段通常处于饱和状态;469~2130 nm间的7个陆地波段,由于动态范围较宽、敏感性低因此很少饱和[15]. 对前6个波段的Rrc数值进行盒图分析(图2),可以看到第5波段(1240 nm)易受噪声影响,离群值太大不能用于建模;第6波段(1640 nm)的Rrc值普遍偏小,基本接近0,对EOF分解结果意义不大. 因此,本文选取469、555、645和859 nm前4个波段用于EOF建模.
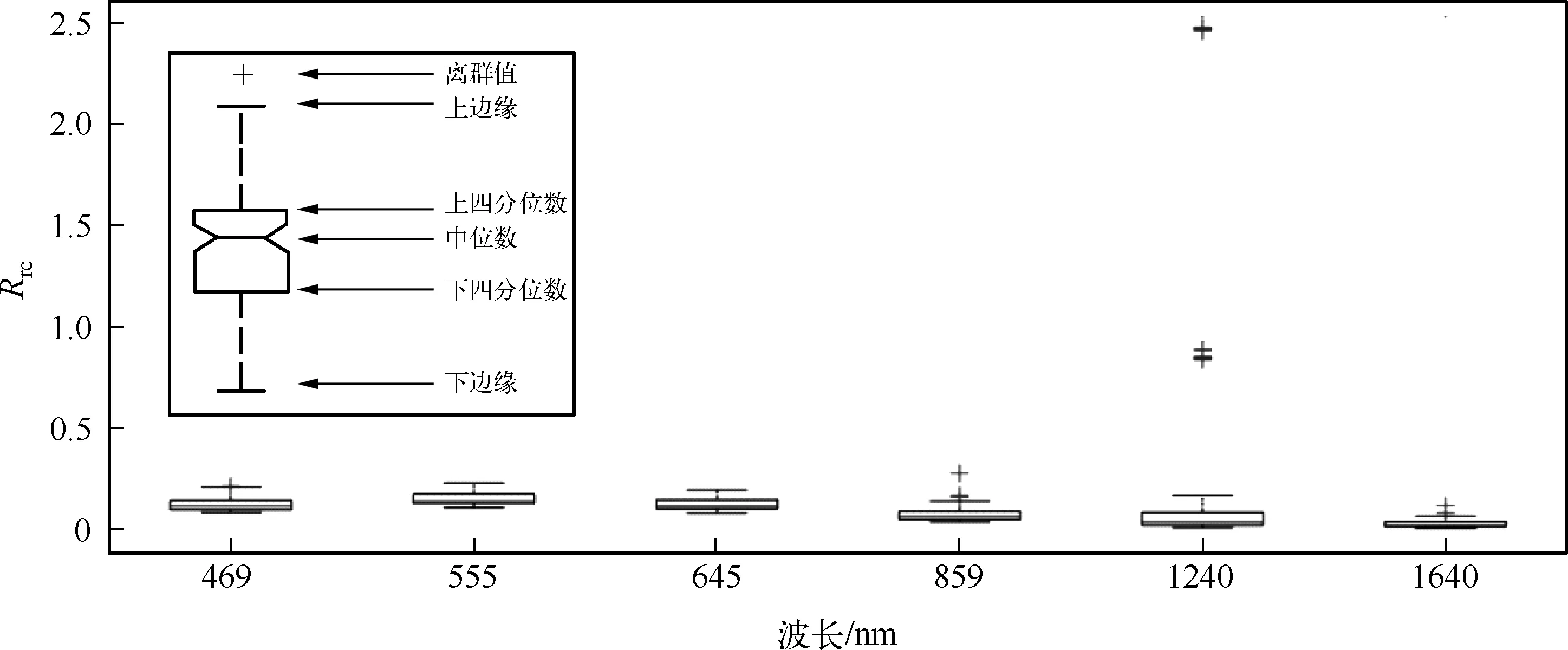
图2 MODIS-Rrc 6个波段的盒图分析Fig.2 Boxplot analysis of 6 bands using MODIS Rrc
4个波段的Rrc光谱如图3a所示. 通过对光谱特征的分析发现,不同Chl.a浓度下Rrc光谱变化的特征很类似,但振幅完全不同. 值得注意的是,有2个实测点859 nm波段的Rrc反射率明显高于其他点,且在645 nm波段出现吸收峰,这2个点位代表水华发生时Rrc光谱的变化情况,这样的点位用于建模可以提高模型的适用性.
1.4 模型训练点的筛选
部分训练点由于受到影像质量和大气条件的影响,光谱形状异常,这些训练点会影响模型的精度,因此需要对模型训练点进行筛选. 通过把所有训练点位,都标记在对应天数的RGB原图上,删除靠近影像边缘,易受水陆混合效应影响的样点;另外,根据当天的影像质量,需要删除天气、影像明显损坏等有问题,以及光谱特征比较异常的样点. 筛选后用于建模的样点为55个,有效样点水质参数的统计结果(表1)表明,用于建模的数据分布范围很宽,Chl.a最小浓度为8.19 μg/L,最大浓度可以达到727.16 μg/L,SPM浓度的变化范围也比较大,基于该数据集构建的模型适用性更广.
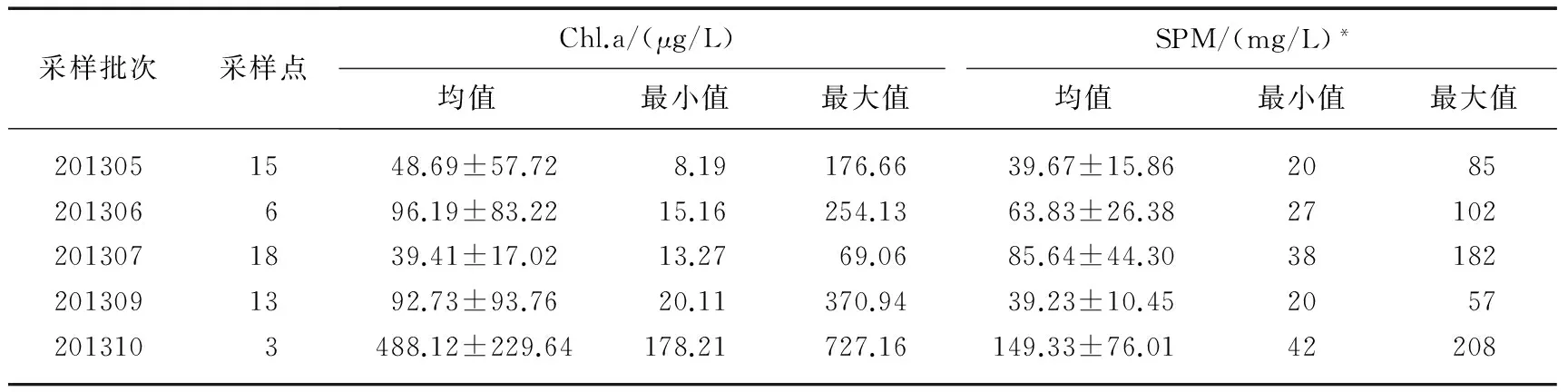
表1 EOF建模的有效样点的水质参数统计
*缺少7个5月SPM数据.
2 EOF算法构建、验证与应用
2.1 EOF方法概述
EOF方法是一种数学统计方法,可用于分析变量的结构特征,这种数学分析的方法最初是引入气象和气候学的研究中,近年来,有关海岸带水体反射率光谱与水体组分含量的研究中也逐渐采用该方法[16]. EOF的结果是对变量数据的所有变化模式进行分析之后,得出一组正交不相关的变量集. 第一模态代表最大部分的贡献方差,后几个模态逐渐减少,贡献方差表征对变量变化模式的解释程度,因此选择前几个模态,就可以在不损失变量信息的情况下进行重新归类.
对Rrc数据进行EOF分析,即对Rrc数据进行重新归类,对Chl.a总体变化贡献显著的波段数据进行重新组合. 另外,回归分析的一个重要前提要求变量不能线性相关,而EOF分解的模态彼此正交不相关,便于进行Chl.a反演的回归建模.
2.2 基于EOF分解方法模型构建
2.2.1 光谱归一化预处理 对Rrc数据进行EOF分析表明,第一模态含有89.52%的贡献方差(图3c),除第一波段外,它的形状与Rrc平均形状类似,这表明它所描述的是光谱振幅的变化. 对Rrc进行归一化之后(公式(1))得到NRrc(normalized reflectance raleigh corrected,NRrc)光谱[17],归一化过程大大减弱不同浓度的光谱分散程度,光谱变化的模式更容易被识别(图3b). 累积方差结果(图3c和3d)表明,归一化对各模态累积方差的改变并不大,归一化后前3个模态累计贡献方差达100%,而归一化前前3个模态累计贡献方差只有99.47%.
(1)
光谱归一化并不影响对光谱变量的解释程度,然而归一化后各个模态的形态却发生重大变化. 归一化后第一模态的变化形态与归一化前第二模态的变化形态类似,但贡献方差(图3d)的比例更大(58.24%),归一化前(图3c)第二模态的贡献方差只有7.03%,这种变化表明对Rrc数据进行归一化处理非常关键,它更加真实地捕捉光谱形状的变化模式,从而可以更精确地研究光谱变化所驱动的Chl.a浓度变化.

图3 建模数据点:Rrc光谱特征(a)和NRrc光谱特征(b); Rrc(c)和NRrc(d) EOF分解后的模态特征Fig.3 MODIS Rrc (a) and NRrc (b) spectra(469, 555, 645 and 859 nm) corresponding to the 55 in situ measurements; Loadings, variance explained represented for modes 1-4 of EOF analysis of Rrc (c) and NRrc (d)

图4 不同Chl.a浓度下的NRrc(a)和EOF分解得分值(b)Fig.4 NRrc spectra (a) and scores after EOF analysis (b) under different Chl.a concentrations
2.2.2 EOF建模理论基础 对光谱预处理后,利用EOF分解NRrc数据计算出每个模态的得分值,不同Chl.a浓度下的得分值呈现一定的特征. 将Chl.a浓度分为4个梯度——高浓度:大于100 μg/L;中浓度:50 ~100 μg/L;正常:20~50 μg/L;低浓度:小于20 μg/L,对NRrc光谱分别进行渲染,显然不同Chl.a浓度下的NRrc是杂乱无序的(图4a),归一化过程并没有把不同Chl.a浓度区分出来. 若以4个模态为横坐标,以每个模态的得分值为纵坐标按不同梯度Chl.a浓度进行渲染,结果表明经过EOF分解后,各波段重新线性组合的结果使得不同Chl.a浓度条件下的得分谱具有一定特征(图4b),即EOF分解提取出了波段贡献的数值特征. 正是因为存在这样的特征,才能以每个模态的得分值为因变量作Chl.a浓度的回归分析,这是进行EOF回归建模的基础.
2.2.3 模型构建过程 模型构建可以简单分为3个过程,具体如下:
1) 对Rrc数据进行归一化,得到NRrc数据. 对归一化光谱利用MATLABTM的princomp函数进行EOF分解. EOF分解的输出包括EOF每个模态的得分向量,每个得分向量都是原4个波段的线性组合,即波段的重新归类. 除此之外,还包括每个波段的载荷值,即原波段进行线性组合的系数,还有每个模态的贡献方差,用于说明描述原波段变化模态的解释程度.

图5 EOF建模的模型误差(a);独立数据集的EOF模型验证结果(b)Fig.5 Relationships between in situ measured Chl.a concentrations and estimated Chl.a concentrations from MODIS(a); Validation using independent field measurements from the 6 fixed stations (b)
2) 对训练点位进行筛选,确定训练点位集,并根据所得到的EOF各个模态的得分值与实测Chl.a浓度作多元逐步回归分析. 使用MATLABTM的regress函数,以每个点位4个模态的得分值T1、T2、T3、T4为自变量,对应实测Chl.a浓度为因变量,可以得到回归系数(β0~β4):
β0+β1T1+β2T2+β3T3+β4T4=实测Chl.a
(2)
3) 将EOF算法应用于MODIS影像上,对Rrc影像上所有有效像素进行归一化处理,经EOF分解得到每个像元的EOF得分.β0~β4是构建模型时训练点位的回归系数,T1~T4是影像上每个像素的EOF得分. 因此,反演所得到的Chl.a浓度为:
反演Chl.a=β0+β1T1+β2T2+β3T3+β4T4
(3)
基于55个训练点位模拟出来的算法结果如图5a所示,表明EOF模拟Chl.a浓度和实测Chl.a浓度之间具有显著相关关系(R2=0.94),无偏差RMSE(URMSE)[18]为65.27%. 实测Chl.a浓度20 μg/L以下的点位相较于其他浓度下的点位回归情况,分散度会更高一些. 鉴于EOF模型只使用MODIS的4个非特征峰波段的前提下,该算法的性能是可以接受的.
2.3 模型验证与精度评价
利用第三方提供的5个采样点8次野外巡测(即2012年3、5、10、12月和2013年4、5、10、11月8次野外调查)独立Chl.a浓度数据集(N=40)进行算法验证. 验证数据覆盖湖区的不同位置,并且在没有参与构建模型的3、4、11月均有数据,这样的数据集更有利于检验算法的应用效果. 验证结果(图5b)表明,数据的相关性较好(R2= 0.63),误差范围也可以接受(URMSE=85.46%);在1∶1回归线附近分散程度略高的验证点,可能是由于野外采集及室内提取Chl.a浓度过程中存在一定偏差,同时尺度效应所带来的单点误差,都会对验证结果带来一定的影响.
2.4 巢湖Chl.a浓度时空变化
野外实测的Chl.a浓度受到时间和空间的限制,因此,验证结果可能无法完全检验算法的性能. 为了进一步验证EOF方法反演Chl.a浓度性能,也是为了检验模型业务化运行的能力,将该算法用于MODIS卫星影像上来检查空间分布和季节差异是否合理.
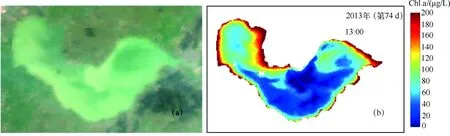
本文获取了2013年130景的MODIS影像,通过EOF方法进行批量反演,对得到的MODIS Chl.a浓度分布图进行逐一检查,对照真彩色RGB,以确定相同位置Chl.a浓度的空间格局是否一致,并分析Chl.a浓度空间分布特征的季节平均变化趋势(图6b~e).Chl.a浓度较高的地区主要位于巢湖西半湖地区,东半湖的浓度略小一些(图6a),这与夏季平均Chl.a浓度(图6c)的变化规律一致,而RGB图像上中部地区出现小片区域的藻华,在反演的结果图上也展现出,这个现象也进一步证明该算法是合理可信的.

图6 EOF算法应用于巢湖影像结果(a);2013年巢湖Chl.a浓度季节分布(b~e)Fig.6 The EOF algorithm applied to MODIS images (a) and the seasonal mean Chl.a distribution in 2013 (b-e)
3 讨论
3.1 训练点位选择
EOF属于统计学方法,它要求抽样必须代表总体才有效,因此训练数据集必须反映总体的特征. 本文使用的光谱数据集是人为抽样的,影响到参数估计、无法代表总体参数的点位不能参与参数估计. 如果更改数据集,回归系数将产生很大的变化,本文的模拟结果也证实了这一结论:从原始数据集随机抽取N个数据(17 表2 更换数据集系数的统计结果* *系统默认小于0.001时记为0. 光谱形状异常的离群值固然会影响到EOF得分的提取,但是还有一些光谱形状异常的点位并非离群值,它们处于EOF得分的聚集区,但是回归之后的结果与实测值的差值较大,因此影响回归方程的建立. 对于这样的点位,仅依靠前2个EOF得分的形状无法进行剔除,因此对点位进行标注的步骤非常有必要,这样方便找到异常目标点位进行删除. 由于4个变量的EOF属于高维空间分解,所以无法直观展示异常光谱点位对EOF分解的影响. 根据前3个模态的累计贡献方差图(图7a),前2个模态的EOF累计贡献方差达到85%,可以基本保证波段信息没有损失,因此选择前两个主成分得分,二维散点图方便说明问题. 将异常光谱(图7b)的异常点位进行删除,所有点位的得分值均发生重大变化,这样的离群点位不能参与参数回归,因此,这类异常光谱通常需要删除. 图7 EOF各模态累计贡献方差(a)和不同光谱下的EOF形状(b)Fig.7 Variance explained for modes 1-4 of EOF analysis (a) and EOF shape of different spectral(b) 3.2 训练点位阈值的确定 在不断筛选点位的过程中,面临着使用EOF方法时训练样本的数目多少才会合适的问题. 因此本文使用统计学中的刀切法(Jackknife)对训练集进行重采样来确定样本数目的阈值. 刀切法是再抽样的一种统计方法[19],每次从训练集中删除一些样本,剩余的样本成为刀切集,由一系列这样的刀切集计算统计量的估计值. 刀切法要求样本集需要事先给定,恰好符合我们的训练点位集已经确定的情况. 对训练集的所有55个点位进行EOF得分值的计算,随机抽取N个点的得分值作为刀切集,与对应的实测Chl.a浓度进行多元逐步回归分析,得到的回归系数用于拟合余下(55-N)个点位的得分值,与实测Chl.a浓度进行验证,并计算验证结果的R2以及RMSE. 选取点位的过程重复1000次用于减小随机误差,并提高运算效率. 结果表明不同训练点的个数条件下,RMSE(图8a)存在一个急剧下降的过程,7个训练点RMSE=0.32到17个训练点条件下RMSE=0.29,RMSE迅速减小. 多于17个训练点时RMSE的降低率明显变缓. 同样,R2(图8b)也呈现同样的规律,从7个训练点R2=0.70,到17个训练点条件下R2=0.80. 而当训练点大于17时,R2增加的速率大幅下降. 虽然之后随着训练点数量的增加,R2仍然呈现上升趋势,但上升的幅度很小,从17个训练点条件下R2=0.80,到37个训练点下R2=0.84. 这个结果证明多于17个样本点对EOF反演Chl.a浓度的模型性能只有很小的改进,这也提供了用于构建EOF模型样本数目的最低阈值,对再使用此类算法进行参数反演具有一定的借鉴意义. 图8 不同训练点条件下的RMSE(a)和R2(b)Fig.8 Number of training points versus Chl.a jackknife RMSE(a)and training points versus jackknife R2(b) 3.3 高悬浮物水体EOF适用性 2013年3月15日的影像显示水体整体呈现白色,水体悬浮物含量较高(图9a);而通过EOF方法估算的Chl.a浓度(图9b)并没有受到悬浮物的显著影响,整体呈现出较为合理的空间分布;特别是巢湖中部和南部,Chl.a浓度整体偏低(<30 μg/L),与巢湖春季(图6b)特征符合,而此处图像显示尤为浑浊,证实EOF方法对于高悬浮物水体具有较好效果. 3.4 云、大气的影响对算法应用的影像 EOF算法只使用经过瑞利校正的MODIS数据,避免大气校正带来的误差,因此它对不同条件下的气溶胶浓度均表现出良好的应用效果. 图10展示算法在不同的气溶胶条件下的性能,根据真彩色RGB图像的直观显示,2幅影像的气溶胶条件不同,b图的气溶胶浓度显然要高于a图的情况[20]. 而EOF反演的结果表明,这2幅连续2天的影像在Chl.a的空间格局和浓度上大体趋于一致,并没有因为气溶胶厚度的增大带来空间的异常,因此也说明EOF算法对不同的气溶胶条件具有很好的抗扰动能力. 对于有云条件下的影像,如果不做掩膜将云覆盖的部分进行去除,对整幅Rrc影像进行EOF分解后,会导致无云部分的得分值偏高,随之估算得到的Chl.a浓度也会普遍偏高或者局部出现异常. 因此,需要根据RGB图像先勾出云层的掩膜,再进行Chl.a浓度估算. EOF分解很好地揭示了Rrc光谱的变化模式,从而与Chl.a浓度的变化进行回归分析,结果表明,该模型可以利用很少的波段(4个)有效估算巢湖水体Chl.a浓度,空间分布合理,季节差异明显,符合巢湖实际情况. 该方法在高悬浮物水体、不同气溶胶条件下都具有很好的表现,适用性较强. 另外,EOF算法比较容易操作,运行的时间效率较高,通常一景影像在普通电脑上运行1.8478 s内就可完成,满足业务化运行的需求. 反演结果精确、应用性能稳定,因此,该方法可以用于巢湖水体Chl.a浓度的业务化监测. 图9 高悬浮物水体EOF算法应用情况Fig.9 Performance of the Chl.a retrieval algorithm under high suspended solids 图10 不同气溶胶厚度条件下(a、b)EOF算法应用情况Fig.10 Performance of the Chl.a retrieval algorithm under different aerosol conditions 需要注意的是,随着更多高性能水色卫星的发射,特别是我国高分系列卫星的快速发展,相信有更多更好的卫星数据可以选择,EOF方法将有更多的波段可以使用,水色参数反演的精度将进一步提高,具有更广阔的应用潜力. 致谢:感谢中国科学院南京地理与湖泊研究所“湖泊-流域科学数据共享平台”提供数据. [1] 王苏民, 窦鸿身. 中国湖泊志. 北京:科学出版社, 1998:230. [2] 臧小平, 吴国平, 涂 敏. 长江流域湖泊水库水华防治对策. 人民长江, 2009, (9): 5-8. [3] Hu W, Jørgensen SE, Zhang F. A vertical-compressed three-dimensional ecological model in Lake Taihu, China.EcologicalModelling, 2006,190(3/4):367-398. [4] Hu C, Lee Z, Franz B.Chlorophyll a algorithms for oligotrophic oceans: A novel approach based on three-band reflectance difference.JournalofGeophysicalResearch, 2012,117(C1). DOI 10.1029/2011 JC 007395. [5] Schiller H, Doerffer R. Neural network for emulation of an inverse model operational derivation of Case Ⅱ water properties from MERIS data.InternationalJournalofRemoteSensing, 1999,20(9): 1735-1746. [6] 刘朝相, 宫兆宁, 赵文吉. 基于SVM模型的妫水河Chl.a浓度的遥感反演. 遥感技术与应用, 2014,29(3): 419-427. [7] Craig SE, Jones CT, Li WKWetal. Deriving optical metrics of coastal phytoplankton biomass from ocean colour.RemoteSensingofEnvironment, 2012, 119:72-83. [8] 姜广甲, 周 琳, 马荣华等. 浑浊Ⅱ类水体Chl.a浓度遥感反演(Ⅱ): MERIS遥感数据的应用. 红外与毫米波学报, 2013, 32(4): 372-378. [9] 马荣华, 孔维娟, 段洪涛等. 基于MODIS影像估测太湖蓝藻暴发期藻蓝素含量. 中国环境科学, 2009,29(3): 254-260. [10] Ma R, Tang J, Dai J.Bio-optical model with optimal parameter suitable for Taihu Lake in water colour remote sensing.InternationalJournalofRemoteSensing, 2006, 27(19):4305-4328. [11] Cleveland JS, Weidemann AD. Quantifying absorption by aquatic particles: A multiply scattering correction for glass-fiber filters.LimnologyandOceanography, 1993, 38(6):1321-1327. [12] Duan H, Ma R, Hu C. Evaluation of remote sensing algorithms for cyanobacterial pigment retrievals during spring bloom formation in several lakes of East China.RemoteSensingofEnvironment, 2012,126:126-135. [13] Duan H, Feng L, Ma Retal. Variability of particulate organic carbon in inland waters observed from MODIS Aqua imagery.EnvironmentalResearchLetters, 2014,9(8):084011. [14] Le C, Hu C, English Detal. Climate-driven chlorophyll-a changes in a turbid estuary: Observations from satellites and implications for management.RemoteSensingofEnvironment, 2013,130:11-24. [15] Hu C, Chen Z, Clayton TDetal. Assessment of estuarine water-quality indicators using MODIS medium-resolution bands: Initial results from Tampa Bay, FL.RemoteSensingofEnvironment, 2004,93(3):423-441. [16] Mueller JL. Ocean color spectra measured off the Oregon coast: characteristic vectors.AppliedOptics, 1976,15(2): 394-402. [17] Barnes BB, Hu C, Cannizzaro JPetal. Estimation of diffuse attenuation of ultraviolet light in optically shallow Florida Keys waters from MODIS measurements.RemoteSensingofEnvironment, 2014, 140:519-532. [18] Hooker SB, Lazin G, Zibordi Getal. An evaluation of above-and in-water methods for determining water-leaving radiances.JournalofAtmosphericandOceanicTechnology, 2002,19(4): 486-515. [19] 李宝慧. 浅谈复杂样本方差估计的一种方法——刀切法. 统计教育, 1998, (5):24. [20] Qi L, Hu C, Duan Hetal. A novel MERIS algorithm to derive cyanobacterial phycocyanin pigment concentrations in a eutrophic lake: Theoretical basis and practical considerations.RemoteSensingofEnvironment, 2014, 154: 298-317. An operational algorithm to estimate chlorophyll-a concentrations in Lake Chaohu from MODIS imagery TAO Min1,2, DUAN Hongtao1, QI Lin1,2, ZHANG Yuchao1& MA Ronghua1 (1:StateKeyLaboratoryofLakeScienceandEnvironment,NanjingInstituteofGeographyandLimnology,ChineseAcademyofSciences,Nanjing210008,P.R.China2:UniversityofChineseAcademyofSciences,Beijing100049,P.R.China) Ocean color satellite is mainly designed for oceanic waters, but most of their bands are easily saturated in highly turbid waters. It’s a great challenge to monitor water quality using satellites, because there are no operational algorithm to estimate chlorophyll-a concentration (Chl.a) in inland waters. In this paper, a novel approach based on the Empirical Orthogonal Function (EOF) analysis was developed using the spectral variance from the Rayleigh-corrected reflectance data (Rrc) at 469, 555, 645 and 859 nm, and Chl.a was estimated by considering the regression relationships between the spectral variance and 55 concurrent field measurements. The validation was then performed using independent data (N=40) from other laboratory, withR2=0.63,URMSE=85.46%. Application of the algorithm to MODIS images showed that spatial distribution patterns and seasonal changes are reasonable. Besides, this algorithm is immune to perturbations from thick aerosols and different sediments. Hence, we suggest that EOF algorithm could be applied to estimate Chl.a concentrations in inland waters. Operational algorithm; chlorophyll-a; MODIS; empirical orthogonal function; inland water; Lake Chaohu J.LakeSci.(湖泊科学), 2015, 27(6): 1140-1150 DOI 10.18307/2015.0620 ©2015 byJournalofLakeSciences *国家高技术研究发展计划”863”项目(2014AA06A509)和国家自然科学基金重点项目(41431176)联合资助. 2014-11-10收稿;2015-04-10收修改稿. 陶慜(1991~),女,硕士研究生,E-mail:tmalbee@126.com. **通信作者;E-mail:htduan@niglas.ac.cn.


4 结论

猜你喜欢
航天制造技术(2020年4期)2020-09-11
恋爱婚姻家庭(2020年25期)2020-09-08
恋爱婚姻家庭(2020年9期)2020-09-07
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
高师理科学刊(2016年8期)2016-06-15
浙江大学学报(工学版)(2016年10期)2016-06-05
西藏科技(2015年4期)2015-09-26