基于DeviceNet现场总线的船用分布式液压控制系统*
2015-03-15 02:42闻宏志
舰船电子工程 2015年12期
闻宏志
(中国舰船研究设计中心 武汉 430064)
基于DeviceNet现场总线的船用分布式液压控制系统*
闻宏志
(中国舰船研究设计中心 武汉 430064)
针对船用控制系统通常面对的控制目标设备多,分散布置于全船区域,以及工作环境恶劣、可靠性要求高等使用要求。论文提出了一种基于设备网现场总线的典型分布式液压控制系统方案,可有效实现对最多不超过63个控制目标设备的分布式控制。并实现了样机研制,验证了方案的可行性,可为船用分布式液压控制系统研制提供参考。
设备网; 现场总线; 液压控制
Class Number TP271.31
1 引言
DeviceNet是由RockWell公司在CAN总线基础上推出的一种低成本、高可靠性的设备层现场总线,它将基本工业设备如开关、传感器、电机启动器和操作员接口等连接到网络,简化了传统系统昂贵、繁琐的布线工作量,使系统检测和控制单元的分布更趋合理[1]。与传统控制系统相比,具有响应快、可靠性高、抗干扰能力强、易于扩展等优点。各控制节点通过开放网络,将底层各设备直接和上层控制器相连。支持最多可达64个节点、多支线的网络,并且允许用户用一根电缆去连接500m以内的PLC用户端点。
上述特点十分适合多个控制目标设备分散布置、首尾距离较远,周围电磁场等环境复杂,可靠性要求高的船舶应用领域。
本文给出了一种基于DeviceNet现场总线的船用分布式液压控制系统及各组成部分技术方案,并实现了样机研制,验证了方案的可行性,为船舶相关控制系统研制提供参考。
2 系统设计要求
本控制系统可满足的主要设计要求如下:
1) 控制目标设备最多不超过63个,分散布置于全船区域,总线电缆总长度接近500m[3]。
2) 控制目标设备均布置于舱面,为保证在盐雾、高湿和震动等环境下的设备工作可靠性,选用独立液压系统作为控制目标设备的执行机构动力源。
3) 要求所有控制目标的主要设备状态、控制指令、执行机构动作执行情况和故障报警等信息均可通过网口接入船上信息系统网络。
3 系统总体配置方案
DeviceNet是最适用于制造工业自动化的现场总线,一个基本的DeviceNet现场总线由下列部分组成[2]:
1) 主控器(支持DeviceNet的PLC或PC);
2) 现场输入/输出模块,用于连接控制系统中各种现场装置;
3) 具有DeviceNet接口的现场装置;
4) 线缆及网络附件。
本系统主要由上位机、PLC主控站、I/O输出站(含电磁阀)、I/O输入站(含动作到位传感器)电缆附件和执行机构(含液压回路和管路附件)等组成。该系统最大可以带64个节点[8]。用主单元与从单元通信实现远程控制。控制系统结构图详见图1。

图1 控制系统结构图
1) 最上层为上位机部分,由计算机和集线器组成。计算机主要进行远程监控。
2) PLC主站:选用ROCKWELL公司的PLC做主站[8]。主要的模块包括CPU模块1769-L32E,数字量输人模块1734-IB8,数字量输出模块1734-OB8-E,DeviceNet扫描模块1769-SDN,电源模块1769-PA2和底座1734-TB等。DeviceNet扫描模块1769-SDN负责底层DeviceNet网络的通信[9~10]。PLC主站的两个机箱配置如图2和图3所示。

图2 PLC主站机箱1配置图

图3 PLC主站机箱2配置图
3) I/O功能层:I/O输出站主要由1769-SDN和继电器输出模块组成,I/O输入站主要由1769-SDN和数字量输人模块1734-IB8组成。I/O输入站配置如图4所示。

图4 I/O输入站机箱1配置图
4) 设备层:主要指数十个控制目标部位的相关设备。除执行机构和液压回路外,采用OMROM公司的MY4J-24VDC中间继电器,完成对应部位执行动作到位信息的采集。执行机构部分如图5所示。

图5 执行机构部分结构图
5) 电缆附件:粗缆用于DeviceNet主控站与各个I/O站之间的干线,细缆用于各个I/O站与传感器等之间的支线。
本系统由船电提供1路三相380V 50Hz电源和1路单相220V 50Hz电源。其中,三相380V 50Hz供给液压泵站的电机和电加热器。单相220V 50Hz供给PLC主控站,在PLC主控站内将220V 50Hz分配给AC/DC电源模块和PLC电源模块;AC/DC电源模块将220V 50Hz转换为24VDC电源提供给电磁阀组,PLC电源模块将220V 50Hz转换为5VDC供CPU和各种I/O等PLC模块使用[4]。
执行机构(含液压回路和管路附件)部分的技术状态,如:液压泵站功率[5~6]、液压站容积、液压管路和执行机构具体形式等均需根据控制目标的外形、载荷、数量和分布情况等进行设计,本文不再详述。
4 系统软件结构及信息接口
本控制系统软件包括系统状态显示程序和PLC控制程序,系统状态显示程序主要用于完成系统运行和故障等信息的显示和存储,PLC控制程序主要用于实现系统的控制逻辑。
其中,系统状态显示程序运行于上位机,采用MCGS组态软件开发。主要软件模块包括:
1) 上行通信模块:实现与全船信息网络系统进行信息交互;
2) 下行通信模块:实现与PLC控制器进行实时数据交换;
3) 数据管理模块:实现控制装置状态信息、设备状态信息以及故障报警等信息的显示、记录和查询。
PLC控制程序程序固化在PLC控制器ComPactLogix 1769-L32E中,通过Logix5000开发平台,采用梯形图编程。主要功能模块包括:
1) 硬件配置模块:对各站点模块的地址等信息进行配置,通过RSNetWorx网络组态软件,对CAN网络内各节点,包括硬件站点地址、输入和输出数据地址进行地址分配,完成组网设计。例如:硬件站点地址分配见表1。

表1 硬件站点地址分配表
2) 工况选择及操作模块:接收工况选择开关位置确定工况和相关操作按钮的信息。
3) 采集显示模块:完成控制目标设备状态信息的采集和显示。
4) 控制输出模块:由I/O输出站通过继电器输出模块向液压分系统输出控制指令。
5) 报警及故障诊断模块:接收并上报各节点的报警和故障诊断信息采集。
PLC控制程序和系统状态显示程序的RSLinX组件通过以太网接口,采用基于TCP/IP协议实现数据同步;系统状态显示程序内部采用基于OPC协议实现与RSLinX组件信息交换[7]。软件接口关系如图6所示。

图6 软件接口关系框图
5 系统典型控制流程
本控制系统接通两路船电后,首先启动液压泵站和各PLC站点,在各PLC站点和液压回路压力正常情况下,通过PLC主控站上的控制按钮等,将控制指令经PLC控制器1769-L32E、I/O输出站、相应部位电磁阀,执行机构(此处为液压驱动转角油缸,通过齿条带动齿轮来实现数十个控制目标的回转运动);在执行机构动作到位后,传感器MY4J-24VDC(固定安装于执行机构)将相关信息经I/O输入站传回PLC控制器1769-L32E;同时,相关动作和设备状态信息通过网络接口上传至上位机显示和存储,并可进一步由上位机接入全船信息网络系统,完成本控制系统的一个典型控制流程。控制流程详见图7。
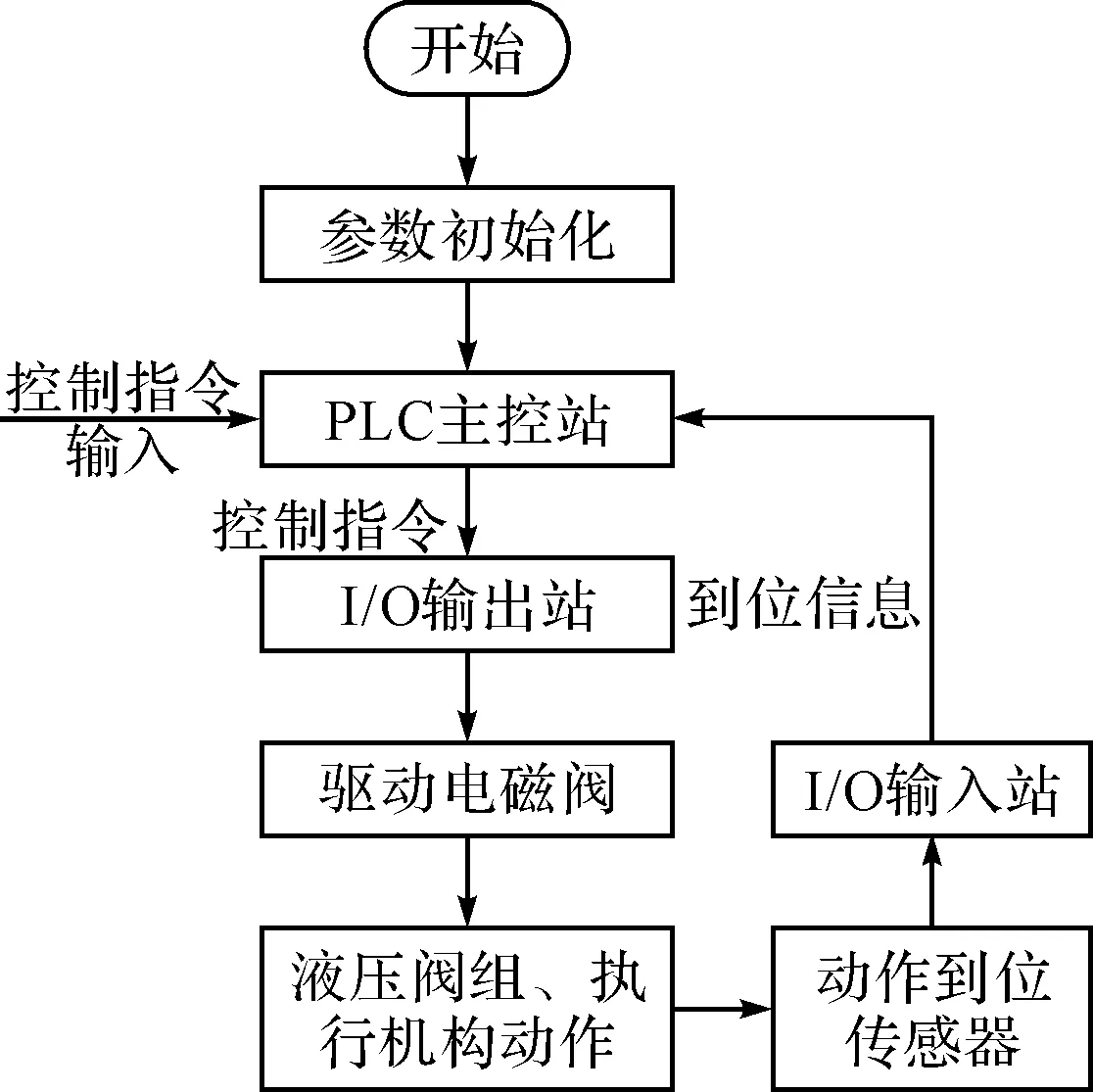
图7 系统典型控制流程框图
6 结语
针对船用控制系统通常存在的控制目标设备多且分散布置于全船区域,以及工作环境恶劣、可靠性要求高等的使用要求,本文提出了一种基于DeviceNet现场总线的船用分布式液压控制系统,可有效实现对最多不超过63个控制目标点的分布式控制。本控制系统样机主要由上位机、PLC主控站、I/O输出站(含电磁阀)、I/O输入站(含动作到位传感器)电缆附件和执行机构(含液压回路和管路附件)等组成,本文给出了各组成部分的硬件配置方案和系统软件结构,并实现了样机研制,已验证了该方案的可行性,为船用分布式液压控制系统研制提供参考。
[1] 曾辉,霍墨.DeviceNet现场总线在屏清洗流水线上的应用[J].低压电源,2004,01:32-36.
[2] 苏平.DeviceNet现场总线在汽车混流焊装生产线控制系统中的应用[J].现场总线专栏,2007,03:12-13,24.
[3] 江秀汉.可编程序控制器原理及应用[M].西安:西安电子科技大学出版社,1996.
[4] 宋德玉.可编程序控制器原理及应用系统设计技术[M].北京:冶金工业出版社,1999.
[5] 王春行.液压控制系统[M].北京:机械工业出版社,2004.
[6] 黎启柏.液压元件手册[M].北京:机械工业出版社,1998.
[7] 邱公伟.可编程序控制器网络通信及应用[M].北京:清华大学出版社,2000.
[8] 凌空,蒋式勤.基于DeviceNet的小区监控[J].微计算机信息,2003,09:27-28.
[9] 美国RockwellAutomation设备网(DeviceNet)产品概貌.
[10] 美国Rockwell 1769CompactLogix控制器选型指南[S].
The Distributed Hydraulic Control System Based on DeviceNet Field Bus
WEN Hongzhi
(China Ship Development and Design Center, Wuhan 430064)
The control system used in ships usually accounts for some matters, including the amount of objects that be controlled, the objects disperse abroad, atrocious conditions and upper reliability etc. The paper proposes a scheme of distributed hydraulic control system based on DeviceNet Field Bus. The paper implements the system manufacture, validates the feasibility of the scheme, and provides a reference for study or manufacture for distributed hydraulic control system used in ships.
devicenet, field bus, hydraulic control
2015年6月3日,
2015年7月19日
闻宏志,男,高级工程师,研究方向:船舶电子。
TP271.31
10.3969/j.issn.1672-9730.2015.12.027
猜你喜欢
天然气与石油(2022年4期)2022-09-21
农业技术与装备(2020年1期)2020-03-04
家庭科学·新健康(2018年10期)2018-12-15
电子制作(2018年11期)2018-08-04
科技与创新(2016年17期)2016-11-04
会计之友(2015年15期)2015-08-11
空间控制技术与应用(2015年2期)2015-06-05
中国高新技术企业(2015年17期)2015-05-18
安徽电气工程职业技术学院学报(2015年3期)2015-05-04
舰船科学技术(2015年8期)2015-02-27