面向作战任务的传感器网络管理*
2015-03-15 02:42喻光辉李启元
舰船电子工程 2015年12期
喻光辉 李启元 段 立
(海军工程大学电子工程学院 武汉 430033)
面向作战任务的传感器网络管理*
喻光辉 李启元 段 立
(海军工程大学电子工程学院 武汉 430033)
如今,传感资源是作战任务如,边界监视最有价值的资源。资源-任务分配包括把传感器、平台等有用资源分配给任务,在每次行动中来满足任务能力需求。这在情报、监视、任务捕获和侦察领域是关键的。虽然有各种类型的待选资源,每种资源提供不同的能力,但是这些资源对特定的任务并非都是有用的。这就产生了如何分配有用的资源来满足各自任务能力需求的问题。基于当前的语义网络技术使用一种新的混合推理方法,即基于规则和基于本体相结合的推理,来进行任务需求与资源能力匹配,在灵活的方式下必要地和高效地满足任务需求。
传感器; 平台; 资源分配; 知识描述; 混合推理
Class Number TP391.9
1 引言
传感器管理是一个跨学科的研究领域,它涉及到许多领域的技术。其中主要方法[1]有:基于滤波技术及协方差控制的方法、基于数学规划和优化技术的方法、基于信息论的方法、基于模糊逻辑和神经网络的方法、基于随机集合理论的方法以及近些年出现多智能体与市场理论的方法、基于语义的方法。在现代战斗机、智能机器人、无线传感器网络等设备对传感器自动管控的迫切需求下,伴随着传感器数据融合技术的不断发展,传感器管理已成为了国际上的研究热点和前沿课题。目前,许多团体已经对传感器网络管理问题做了相关研究,并提出了不同的机制,可以应用于解决相关问题,但是用于资源-任务分配问题上还存在以下一些问题: 1) 一些方法在决定如何选择合适的资源来满足任务能力需求方面,过多地依赖于人的参与[2]。 2) 大多数传感器管理方法不是针对需求来对传感器进行优化的[3~5]。比如基于信息论方法主要是以平均信息增量最大为目的来优化资源的分配,但是在复杂的环境中,作战实体有各自的任务需求,并不是整体信息增量越大越好。 3) 一些方法尝试智能地资源任务匹配,但是这些方法就它们的假设而言受到很大的限制。比如文献[6]假设有无限的可用资源,然而文献[7]假设资源属于同一类型,即任意资源都可以提供一些效能给一个任务。这并不是一般的情况,在一些复杂的环境中,资源根据特性是多样化的,具有不同的能力、操作条件等。仅适合于特定的任务。 4) 目前大多数方法忽略了重要的定性属性如资源提供的能力,天气条件等。这些属性在决定哪些资源可用于实现任务的信息需求中发挥关键作用。此外,没有考虑资源和任务之间重要的多对多关系,即一个任务可以几种不同的方式完成;一种资源可以用于实现多个不同类型的任务,就认为这些关系可以建立灵活的资源管理方式。
本文基于语义网络技术使用丰富的知识模型和推理机制来解决上述问题。使用一个基于规则的系统来推理任务能力需求,然后讨论了一个基于本体的推理框架来选择合适的资源,可以满足指定的能力需求,从而增加分配的灵活性。描述了围绕这个模型已开发的工具,在分配过程中协助决策者进行任务需求和资源能力匹配。该系统不仅以一种灵活的方式选择资源类型,而且也保证了推理过程的合理性。
2 基于知识的传感器网络管理框架模型
图1描述了该系统的体系结构,其中包含两个主要部分:基于规则的系统和SAM(Sensor Assignment to Missions)推理机。在此结构体系中,基于规则的系统用于推理能力需求。SAM推理机用于选择资源类型,高效地满足任务的能力需求。

图1 系统体系结构图
该体系流程简述如下:
第一步:对知识集如,国家图像解译度分级标准和领域资源进行分类,使用本体语言如,OWL-DL。描述这些分类,创建一个广泛的知识库。
第二步:形式化解释任务,定义规则,使用这些规则进行任务能力需求推理。
第三步:使用推理机如,SAM。进行能力-需求匹配,推理出必要的和高效的资源,满足任务能力需求。
3 基于规则的能力推理
在这样一个环境中,任务和资源之间存在多对多的关系,应当考虑不同的资源能力可以满足同一个任务需求。例如,在一个监视任务中,可以为侦查车辆指定能力需求,而不是直接指定红外能力。这是因为根据现有可用资源,还可以用雷达或者声学能力来侦查车辆。因此,在资源-任务分配或再分配中产生多自由度。
提出了一个基于规则的系统来解决这些问题。用户描述他们的任务需求例如侦查车辆,确定一个特定的建筑等。系统推理出可以满足这些需求的资源。为了能够实现这个推理过程,任务必须被形式化描述,要与实现它们所需的能力相关联。很多知识集关于实现相同任务所需的不同能力方面提供了足够的信息。在接下来的部分,将讨论其中的一个知识集,并展示我们是如何将任务形式化以致可以推理出不同的能力。
3.1 国家图像解译度分级标准(National Image Interpretability Rating Scale,NIIRS)
NIIRS[8]根据任务的类型,定义了图像解释水平,分析家使用给定的等级水平执行任务。NIIRS提供了一个简单但强有力的工具来分析和表达图像质量和传感器系统需求。NIIRS被定义为可见、红外、民事、雷达和多光谱图像,包含十个等级规模(0~9),若干解释任务或标准形成一个等级。在每个光谱内,更高NIIRS等级继承下级的标准水平。
依照大量的可以从给定的规模中提取的信息,标准表明了一个图像的表达力。例如,4级可见图像能力识别单个轨道是可能的,而6级可见图像能力识别一个车辆成为可能即,车辆的构造/模型可以被识别。此外一个任务可以使用不同的光谱和不同的NIIRS等级实现。例如,侦查一个大型飞机可以分别使用2级红外图像能力和3级可见图像能力完成。图像分类标准可以大致分为侦查、区分和识别。
3.2 领域本体
领域是感兴趣的目标例如,车辆、建筑、人等。例如执行侦查大型建筑(例如,医院、工厂的任务。在这种情况下,领域可被分类为建筑。执行另一个事例任务,在已知的车辆调配场连续侦查车辆。在这个例子中,车辆是领域。
已经创建了一个领域本体来表示这些概念。图2展示了领域分类的一个片段。使用这些概念形式化NIIRS中描述的标准,如3.3节所述。图2描述了领域分类。也介绍了一个对象属性hasFeature来描述领域中的可区分特征。例如,码头和机库都是领域概念,但它们同样也是港口的组成部分,这使得它们成为港口的特征。此外,这种分类帮助我们正式定义领域、区分和识别的概念:

图2 “领域”的分类
1) 领域:如果感兴趣的概念有任意子概念,那么它就是领域例如,WheeledVehicle。
2) 区分:如果一组概念是领域,那么它们也是可区分的。例如,侦查一辆吉普和一辆轿车,然后根据它们的外型来区分。
3) 识别:如果感兴趣的概念没有子概念,那么它是可识别。例如,SAAB 9-3 sedan是可识别的。
3.3 形式化描述任务
定义一个6元素元组FIT(T,W,F,C,I,V)作为一个标准,其中T表示任务的执行类型例如侦查、区分、识别等;I是可用于执行解释任务的能力/情报类型如,在NIIRS中图像光谱;W={w1,w2,…,wi}是一组使用能力/情报I可被发现的领域(如{港口,医院});F={f1,f2,…,fj}是一组描述W的特征(例如,{码头、仓库、进料台、救护车});C代表领域的环境;V是一个数值,表示情报的质量例如,在NIIRS中图像源的等级。
使用1级可见图像能力可以侦查一个中型港口设施和/或区分出租车道路和大型机场跑道[9]。所以,从这一标准,可以得到如果图像中有一个港口设施,那么可以侦查到它。同样根据1级雷达图像能力,可以根据港口的特征即,现存的码头和仓库,侦查一个港口设施。例如,侦查港口的任务可以被正式为FIT(detect,{Port},{},{},image(Visible),1)。在这种情况下,推理机可以使用1级可见图像能力实现港口的侦查。然而,在很多情况下,可以使用港口明确的特征(例如,码头和仓库)更加精确地侦查目标。因此,FIT(detect,{Port},{Pier,Warehouse},{},image(Radar),1)的陈述允许推理机使用港口一些明确的特征而侦查它。上例简短的描述了当推理不同的能力时,任务是如何体现在的形式化中来利用规则的特征和环境。
这个FIT形式也可以用于正式化其他情报领域知识。例如,Guo et al[9]提出基于车辆的声波标记图来侦查和区分车辆。因此,在结构框架中也可以使用声波标记图替代NIIRS来正式化侦查和区分任务。此情况下,声波标记能够使侦查车辆,可以正式化陈述为FIT(detect,{Vehicle},{},{},Acoustic,5)。
通过形式化NIIRS语料库,使用上述的表示创建一个广泛的知识库。
3.4 规则推理任务能力需求
规则使用FIT形式从创建的知识库中实现推理。这些规则得到最小的但必要和高效的能力来实现一个特定的任务。例如,X表示一组需要观察的目标。定义侦查属于X的元素xi,使用规则如下:
detect(xj,ij,vj)←distinguish(xj,ij,vj)
(1)
distinguish(xj,ij,vj)←identify(xj,ij,vj)
(2)
detect(xj,ij,vj)←FIT(detect,w,f,c,ij,vj)
∧xj∈w
(3)
identify(xj,ij,vj)←FIT(identify,w,f,c,ij,vj)
∧xj∈w
(4)
distinguish(xj,ij,vj)←FIT(distinguish,w,f,c,ij,vj)
∧xj∈w
(5)
这些规则可以解释为:规则1声明如果可以使用情报ij和vj区分感兴趣的目标xi,那么可以使用情报ij和情报vj的量(对应于NIIRS中的等级)来侦查目标xi。规则2声明如果使用ij和vj可以识别目标xj,那么可以使用ij和vj来区分目标xj。规则3、4和5表明如果可以发现一个相关的FIT陈述,其中xj是领域w中的一个成员,那么可以侦查、识别或区分目标xj。
4 能力-需求匹配
在文献[10~11]中,基于当前的语义网络技术和语义匹配[12]提出了SAM框架来解决资源-任务匹配。该方法的核心是用一组相互关联的本体来描述情节即,行动、作战、任务。资源即,传感器和平台。资源的能力和任务的要求。用OWL-DL[13]来描述这些本体。
该方法启发于行动与方法结构框架(Missions and Means Framework,MMF)[14]。图3描述了MMF结构框架。MMF是由美国陆军研究实验室开发,用来为指定的军事行动提供方法,以评估使用不同资源来完成目标的效能。基于MMF,定义了一个架构来推理适合目的(即,能够满足任务的能力需求)的资源类型。使用语义推理和匹配机制来获得这些资源类型。

图3 MMF框架
图4描述了MMF本体的主要概念和关系。左边分解一个行动为特定能力需求例如,监视的任务集合,右边代表资源提供的能力例如,无人机提供目标侦查。作为传感器资源组能力的组合。任务能力需求大体分为两个部分:情报即,情报学科的类型如图像情报和操作要求即,任务所需的能力,如不断监视。
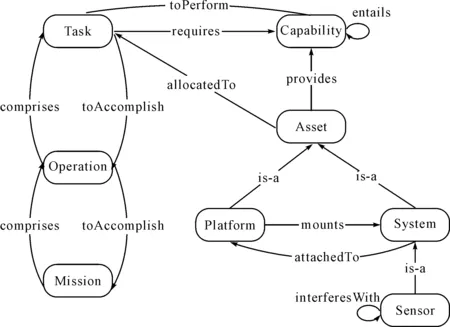
图4 MMF本体的主要概念和关系
这个体系结构由两个主要组件构成,SAM推理机和传感器基础设施和一些数据源(即ISTAR本体,传感器目录)。ISTAR本体表示了情报、监视、目标捕获和侦查方面的领域知识例如,情报类型。传感器目录包含资源的属性即,位置、能源、当前状态等等。这些资源是在ISTAR本体的传感器和平台本体中所描述资源类型的特殊实例。资源的属性是从传感器基础设施[15]中获取的。
推理机检查给定任务的能力需求,提出可行的和逻辑上满足任务的资源类型。这些解决方案之所以在逻辑上是满足的,归因于OWL-DL的逻辑性质和使用的推理机制。使用Pellet作为一个逻辑描述推理机来推理。推理机推荐的一些解决方法是资源类型的集合。这是因为一个任务可能需要多种不同资源能力。例如,为了获取任务的目标,需要视觉和听觉信息,但没有单一的资源能够同时满足这个能力需求。SAM使用集合覆盖算法来计算这些。一个解决方案可能包含一个以上的资源类型,将一个解决方案的集合作为一个资源包。此外,使用包含关系,推理机为特定的任务发现所有合理的资源类型。相信这些解决方案可用于许多有用的方法,如分析一个行动关于资源库存的可行性,协助行动的计划和再计划阶段等等。
5 结语
针对资源-任务分配问题的重要性,本文结合一种基于本体和基于规则的推理机制来实现这个问题。本文使用形式化语言描述任务。基于这种形式,通过分类知识集来创建知识库。一组规则从知识库中得出任务能力需求,文中结合了一些实例验证了这个推理过程。尽管目前尚在探索阶段,但是这个过程暗示了这方面研究是非常有前景的,在以后的工作中将实现细节,归纳任务表示,研究其他规则,使得系统适应性更强、推理过程更加高效。
[1] 罗开平,姜维,李一军.传感器管理述评[J].电子学报,2010,38(8):1900-1907.
[2] Van H F, Lifschitz V, Porter B. Handbook of knowledge representation[M]. Elsevier,2008:1005.
[3] Chavali P, Nehorai A. Managing multi-modal sensor networks using price theory[J]. IEEE Trans. on Signal Processing,2012,60(9):4874-4886.
[4] 黄俊,王满玉,张坤.基于MAS的空基多传感器资源管理方法研究[J].中北大学学报(自然科学版),2011,32(3):355-361.
[5] Aoki E H. A theoretical look at information-driven sensor management criteria[C]//Proc. of the 14th International Conference on Information Fusion,2011:1-8.
[6] Shin K, Nam H, Lee T. Communication modeling for a combat simulation in a network centric warfare environment[C]//Proceedings of the 2013 Winter Simulation Conference: Simulation: Making Decisions in a Complex World. IEEE Press,2013:1503-1514.
[7] M. P. Johnson, H. Rowaihy, D. Pizzocaroz, et al. Frugal sensor assignment[C]//Distributed Computing in Sensor Systems, 2008 4th IEEE International Conference on,2008.
[8] J. M. Irvine. National Imagery Interpretability Rating Scales(NIIRS): Overview and Methodology[C]//Proceedings of SPIE,2003:1442-1456.
[9] B. Guo, M. S. Nixon, T. R. Damarla. Acoustic information fusion for ground vehicle classification[C]//Information Fusion, 2008 11th International Conference on. IEEE,2008:1-8.
[10] M. Gomez, A. Preece, M. P. Johnson, et al. An Ontology-Centric Approach to Sensor-mission Assignment[Z]. Springer Berlin Heidelberg,2008:347-363.
[11] Kadar I. Signal Processing, Sensor Fusion, and Target Recognition XVII[C]//Society of Photo-Optical Instrumentation Engineers(SPIE) Conference Series,2008,6968.
[12] M. Paolucci, T. Kawamura, T. R. Payne, et al. Semantic matching of web services capabilities[C]//Information Fusion(FUSION), 2002 1th International Semantic Web Conference on The Semantic Web,2002:333-347.
[13] de Mel G, Vasconcelos W, Norman T. Intelligent resource selection for sensor-task assignment: a knowledge based approach[C]//Proceedings of International Conference on Advanced Topics in Artificial Intelligence(ATAI 2010). Global Science and Technology Forum,2010.
[14] J. H. Sheehan, P. H. Deitz, B. E. Bray, et al. The military missions and means framework[C]//Proceedings of the Interservice/Industry Training and Simulation and Education Conference: Simulation: Making Decisions in a Complex World. IEEE Press,2003:655-663.
[15] Lili H, Huizhen Y. Proceedings of the 2011 2nd International Congress on Computer Applications and Computational Science[M]. Springer Berlin: Heidelberg,2012:61-67.
Combat Mission Oriented Sensor Network Management
YU Guanghui LI Qiyuan DUAN Li
(College of Electronic Engineering, Naval University of Engineering, Wuhan 430033)
Today, sensing resources are the most valuable assets of critical tasks(e.g.,border monitoring). Sensor-mission assignment involves the allocation of sensor and other information-providing resources to missions in order to cover the information needs of the individual tasks in each mission. This is an important problem in the intelligence, surveillance, and reconnaissance(ISR) domain. Although, there are various types of assets available, each with different capabilities, only a subset of these assets is useful for a specific task. This is duo to the varying information needs of tasks. This gives rise to assigning useful assets to tasks such that the assets fully cover the information requirements of the individual tasks. In this paper, a hybrid reasoning approach, a combination of rule-based and ontology-based reasoning, based on current Semantic Web technologies is proposed to infer assets types that are necessary and sufficient to satisfy the requirements of tasks in a flexible manner.
sensors, platforms, resource assignment, knowledge representation, hybrid reasoning
2015年6月5日,
2015年7月28日
喻光辉,男,硕士研究生,研究方向:海战场信息融合。李启元,男,博士,副教授,研究方向:指挥信息系统仿真。段立,男,博士,副教授,研究方向:数据融合与智能控制。
TP391.9
10.3969/j.issn.1672-9730.2015.12.026
猜你喜欢
军事文摘(2022年17期)2022-09-24
小猕猴智力画刊(2022年3期)2022-03-29
家庭影院技术(2021年8期)2021-11-02
数学小灵通(1-2年级)(2021年4期)2021-06-09
哈哈画报(2021年10期)2021-02-28
计算机世界(2020年50期)2020-01-15
青年生活(2019年23期)2019-09-10
小型微型计算机系统(2019年6期)2019-06-06
Coco薇(2017年11期)2018-01-03
暨南学报(哲学社会科学版)(2016年9期)2017-01-15