一种高分辨率遥感影像码头轮廓提取方法
2015-03-14 06:51:11马国锐江满珍眭海刚
遥感信息 2015年5期
马国锐,江满珍,2,眭海刚
(1.武汉大学测绘遥感信息工程国家重点实验室,武汉 430079;2.福建省水利水电勘测设计研究院,福州 350001)
一种高分辨率遥感影像码头轮廓提取方法
马国锐1,江满珍1,2,眭海刚1
(1.武汉大学测绘遥感信息工程国家重点实验室,武汉 430079;2.福建省水利水电勘测设计研究院,福州 350001)
针对高分辨率遥感影像码头提取中靠岸舰船的干扰难题,提出了一种高分辨率遥感影像码头轮廓提取方法。该方法首先对码头区域影像进行海陆分割分离出海域,然后利用码头轮廓的平直特性和舰船的形状特征,在海陆图像中的陆域进行靠岸舰船和码头目标的粘连分割,从而实现码头目标轮廓信息的获取。实验结果验证了该方法的有效性。
码头提取;海陆分割;岸舰分离;遥感影像;信息提取
0 引 言
港口作为交通运输枢纽、水陆联运的咽喉,通常是铁路、公路、水路和管道几种运输方式的汇集点,具有举足轻重的地位[1]。而码头,作为港口的主要组成部份,是提供船舶停靠、装卸货物和上下旅客的水工建筑物,也是一种重要的人工地物目标。从遥感影像中提取出的码头信息不仅可用于码头监控,以便于码头的利用和管理[2],而且在地理信息系统的数据更新和维护,城市规划的指导与分析等也起着重要的作用[3]。因此,研究遥感影像的码头目标提取技术,以便快速准确地获取码头目标信息,具有重要的实用价值。
但是码头目标的多样性及其所处场景的复杂性使得码头提取技术难度较高。目前,已发表的与码头目标提取直接相关的论文较少,多数相关论文在解决港口目标的检测、识别等问题时涉及码头目标,而这只是实现港口目标的检测、识别的手段,而非目的。如赵波认为码头是直线性目标,先检测出海岸线中的直线,再根据线的连续性连接检测到的直线,最后从中找出最符合码头特点的平行直线组,即码头轮廓[4]。再如周静,对红外遥感影像上港口轮廓上直线的交点进行检测,并标记出其中的角点,然后将最长且存在角点的曲线识别为港口轮廓线[5]。
总体而言,目前虽然在与码头提取相关的海岸线轮廓提取、海陆分割等方面已有了一些解决方法,但这些方法都较少考虑靠岸舰船对码头提取的干扰。码头提取还没有一种成熟的实用方法,仍存在不少的困难有待深入的研究。
考虑到当前实际应用中大场景图像处理的时效性需求,本文提出了一种码头半自动提取方法,即首先在大幅遥感影像上框选含码头目标的感兴趣区域,然后对感兴趣区域影像进行海陆分割分离出海域,进而在海陆二值图像上进行靠岸舰船和码头目标的粘连分割,从而提取出码头轮廓。
1 结合灰度信息和边缘信息的海陆分割
灰度阈值法是目前常用的海陆分割方法之一,阈值的选取方法有很多,如直方图谷底法、Otsu法、最大熵法、自适应阈值法等。灰度阈值分割计算简单、运算效率高、速度快。但在实际应用中,遥感影像可能由于云雾、强光反射、舰船、堆货、建筑物及阴影等的影响,导致海面区域或码头区域灰度的不均匀分布,灰度阈值的分割效果并不稳定[7]。
本文通过借鉴前人方法和结合码头遥感影像特点,提出了一种结合灰度信息和边缘信息的海陆分割方法,通过引入基于周边抑制的边缘信息对二维Otsu分割结果进行修正。该方法的流程图如图1所示。

图1 海陆分割方法流程图
考虑到水面经常由于波浪的存在而形成了较多的细密水波,本文利用周边抑制机理对码头目标附近的背景纹理信息进行抑制,以减少纹理边缘的干扰。
基于周边抑制机理的计算模型的原理是将图像梯度与权重函数进行卷积,得到各像素点的周边加权抑制项,然后从原梯度中减去抑制部分,从而突出感兴趣的轮廓边缘和削弱无意义的纹理边缘[8]。
考虑到小邻域内的有限差分容易受到图像噪声的干扰,而高斯平滑在消除噪声和保持梯度之间能够取得较好的平衡,在此采用高斯滤波对图像进行卷积,以获得梯度影像Mσ。
由于DOG算子的模板是中央为正,周边为负(或中央为负,周边为正)的两个同心圆,十分类似于周边抑制机理,可用DOG算子来模拟各向同性的周边抑制作用,定义权重函数ωσ为:
(1)
(2)
式中‖·‖1为L1范数。然后将梯度与权重函数进行卷积,就可以得到各像素点的周边加权抑制项,如下式所示:
Tσ(x,y)=(Mσ*ωσ)(x,y)
(3)
其中,*表示卷积运算。再从原梯度图中减去周边加权抑制项,得到经过周边抑制的梯度图Cσ(x,y):
Cσ(x,y)=H(Mσ-αTσ(x,y))
(4)
(5)
式中,α是周边抑制强度调节参数,α越大,周边抑制强度越大。
最后,将经过周边抑制的梯度图进行二值化处理即可获得边缘图像。
获得边缘图像后,将Otsu分割图像中标记为背景而边缘图像中标记为边缘的像素也标记为目标,即获得海陆二值图像。但由于暗色水域中灰度值较高的目标如舰船、波浪等和亮色陆域中灰度值较低的目标如阴影、植被等的影响,造成二值图像上的水域和陆域还存在一些小孔洞,还需要用数学形态学的开闭运算来对二值图像进行后处理,以填充孔洞和平滑对象轮廓。经过形态学处理后,计算二值图像上各区域的面积,并将面积最大的连通区域标记为陆域,其余区域标记为水域,即获得海陆二值图像。
2 基于形状特征的岸舰分离
海陆二值图像中由于遥感影像中舰船的灰度特征相比海域的灰度而言与陆域的灰度更为接近,而舰船常停靠在码头边缘,因此靠岸舰船经常被错误地划分为陆域。在这种情况下,靠岸舰船会对码头轮廓的提取造成极大的干扰,因此要准确提取出码头轮廓,不可避免地需要解决靠岸舰船的干扰问题。
本文充分利用码头轮廓的平直特性和舰船呈“米粒状”的形状特征,提出了一种结合Hough变换和粘连分割的岸舰分离方法。Hough变换具有抗噪能力强,其检测结果具有全局性的优点,但同时计算量和内存占用大,本文通过码头区域的几何主轴方向的计算,只需在较小的角度范围内做Hough变换,大大减少了其计算空间、时间的开销。粘连分割则充分利用靠岸舰船的形状特征,识别出靠岸舰船,从而实现靠岸舰船和码头目标的分离。该方法的简要流程如图2所示。

图2 岸舰分离流程图
2.1 改进的Hough变换
由Hough变换的原理可知,Hough变换是在极角-90°~90°范围之间做变换,但在大多数情况下,突堤码头具有明确的“走向”,即几何主轴方向。二值海陆图像上需要检测出的码头轮廓处直线的角度只有两个,即码头区域的几何主轴方向和与垂直几何主轴的方向,这导致大量的Hough运算是无效的。因此,本文通过在Hough变换时引入码头区域的几何主轴方向,只在较小的角度范围内做Hough变换,这样就可以有效地提高变换速度、降低内存占用量。这里参考文献[9]中求几何主轴方向的方法,其原理如下。
假设二值图像中的某区域的灰度分布为f(x,y),其(p+q)阶原点矩mpq和中心矩upq分别定义为:
(6)
(7)
其中,i0=m10/m00,j0=m01/m00。
区域主轴的“取向”α为:
(8)
该区域的主轴即是通过(i0,j0)与X轴夹角为α的直线。
2.2 粘连分割
在少数情况下,遥感影像上可能会出现舰船十分密集地停靠在码头边缘以致其轮廓基本被遮挡的现象,或码头不属于长直线目标的情况,这都可能会导致Hough直线检测失效。因此,本文还利用停靠舰船往往呈向海域突出的接近半椭圆或椭圆的形状特征,设计了一种分离码头目标和靠岸舰船区域的粘连分割方法。
首先,利用Harris角点检测算法来检测码头轮廓上曲率极大值点作为预分割点。获得Harris角点后,利用两点之间的封闭性测度筛选出预选分割点对。码头特征点Fi和Fj之间的疑似舰船线Rij的封闭性度量Closure(i,j)定义为[10]:
(9)

显然,封闭性测度是一个相对量,因而具有旋转、尺度、平移不变性。本文实验中取封闭性测度大于1.5且两点之间互为封闭性最大的点对为预选分割点对。
获得预选分割点对后,对该点对构成的直线方向与码头几何主轴进行比较,若其在一定偏差范围内与码头几何主轴方向平行或垂直,则认为该点对为分割点对,这两点构成的直线段即为粘连区域的一条分割线。若该预选点对不满足上述条件,则计算其分割出的区域的紧致度,若其在预设范围内,则判定该区域为舰船区域,将其从码头区域分割出来。
紧致度是描述目标像素空间分布的聚合程度的度量,定义为[11]:
(10)
式中,Lp为目标区域的周长,Sa为疑似舰船区域的面积。由上式可见,紧致度是相对量,对尺度、旋转变换不敏感。紧致度越大,说明区域形状越不紧凑。合理选择该参数,能够判定呈“米粒”状的舰船区域。
3 实验与分析
通过分辨率遥感影像的码头提取实验,以验证该方法的有效性。仿真实验在Matlab7.11环境下,在Intel2.2GHz微处理器上进行。实验所用码头遥感影像空间分辨率为0.27m。下面给出部分实验结果。
从海陆分割结果可以看出,在多数情况下,影像上海域灰度较低且分布较均匀,陆域灰度相对较高且方差较大,这时能够取得良好的海陆分割效果,如图3(b)中的码头除了因阴影的干扰而造成局部区域的灰度接近海域灰度,导致其被错分为海域外,码头主体实现了比较完整的分割。但是,由于码头边缘常停靠舰船,而靠岸舰船灰度相对海域来说更接近陆域,因此在海陆分割时靠岸舰船经常被错分为陆域。
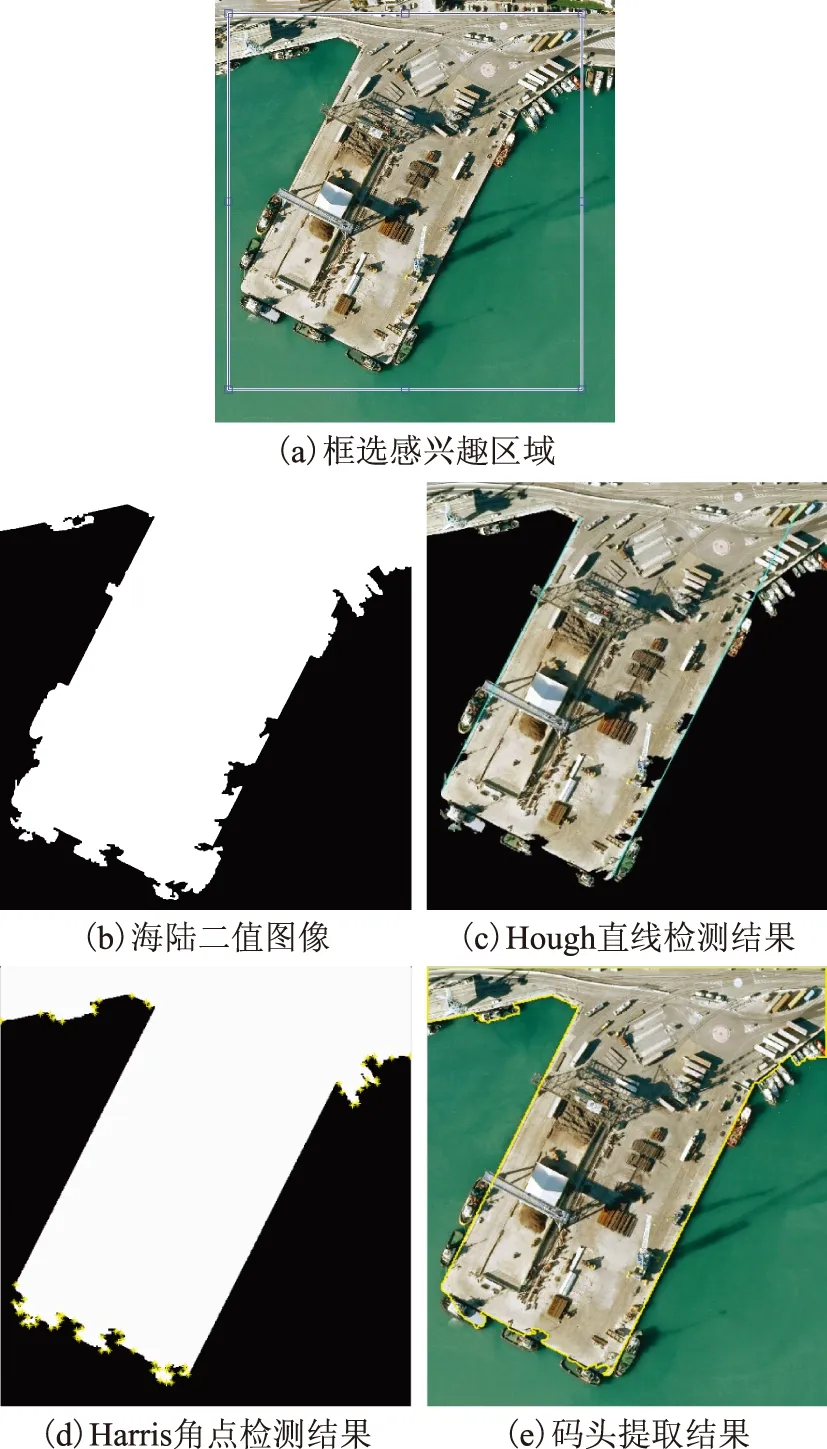
图3 ANCONA港码头半自动提取结果
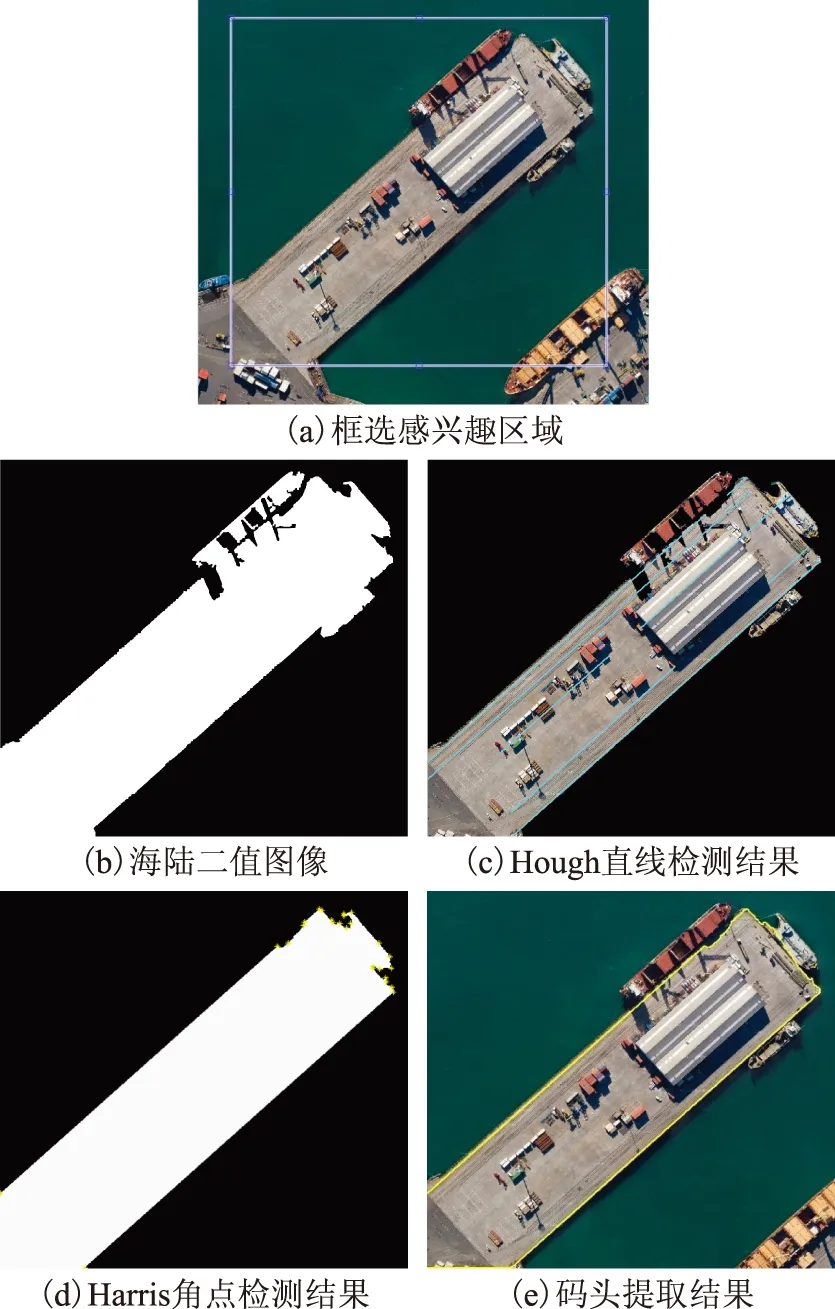
图4 AUCKLAND港码头半自动提取结果
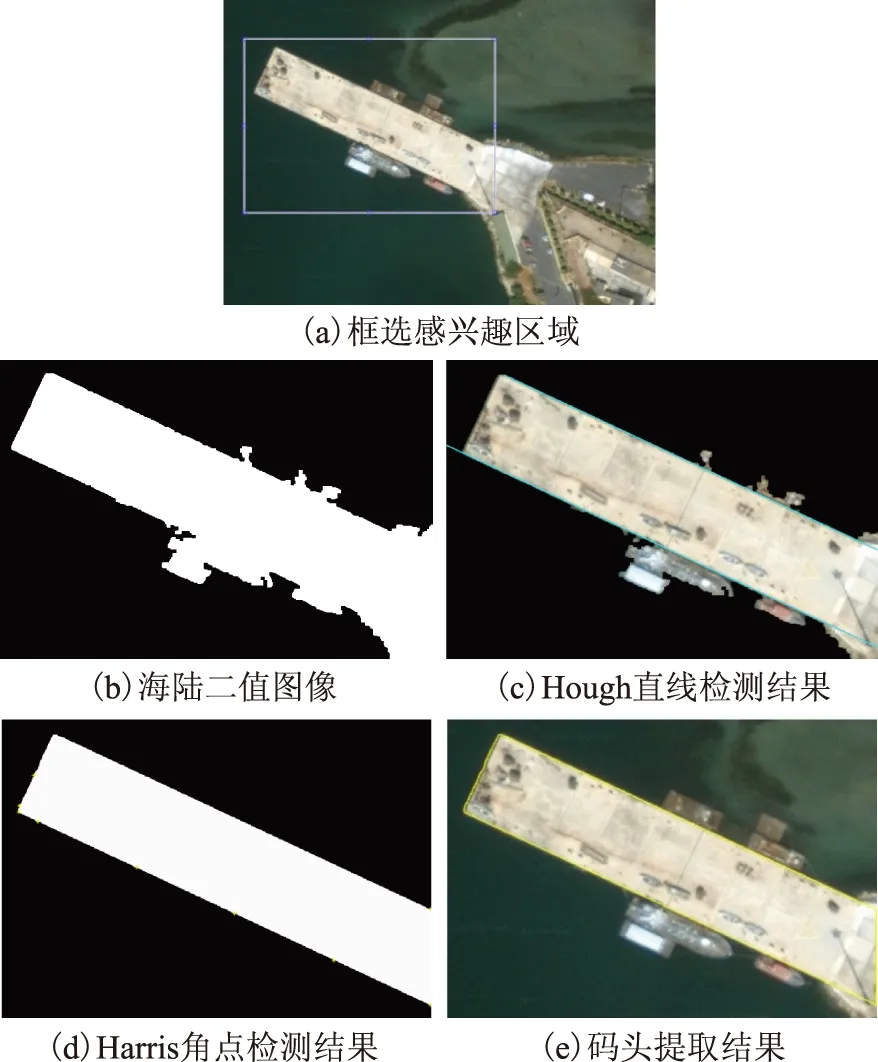
图5 AUGUSTA港码头半自动提取结果
如图3(c)、图5(c)所示,改进后的Hough直线检测方法在多数情况下能够较精确稳定地检测出码头直线边缘。这样,如果舰船停靠在码头长直线边缘就可以很好地实现其与码头的分离。但是,Hough变换在短直线边缘处容易失效,当码头边缘十分密集地停靠着舰船以致其轮廓基本被遮挡时,也会造成Hough变换检测效果的不稳定。
所以本文在岸舰分离时引入了粘连分割,以弥补Hough变换的缺陷。图3(d)、图4(d)、图5(d)显示的是剔除小曲率点后的Harris角点,可以看出,提取出的角点数目较少,且大多数分布在轮廓的形状变化处,能够较好地表达码头轮廓形状。从最终的粘连分割结果来看,大多数的舰船区域均可以被分割出来,但也存在少数海陆分割时分割效果较差的舰船区域,或者是在码头边缘并排尾靠的舰船区域无法分离出来(图3(e))。究其原因是这些舰船区域的几何特征与分割较为完整的舰船区域相差较大,导致其被判定为非舰船区域。
实验采用像素分类正确性度量来对分割结果进行评价。像素分类正确率的计算以人工提取结果作为分类参考数据。设正确分类面积为ST,漏分面积为SL,错分面积为SF,其中面积均按像素数目计算。定义像素分类正确率PCR、像素分类错误率PCE如下[12]:
PCR=ST/(ST+SL)
(11)
PCE=SF/(ST+SF)
(12)
表1为多幅遥感影像的码头目标提取精度评价表。
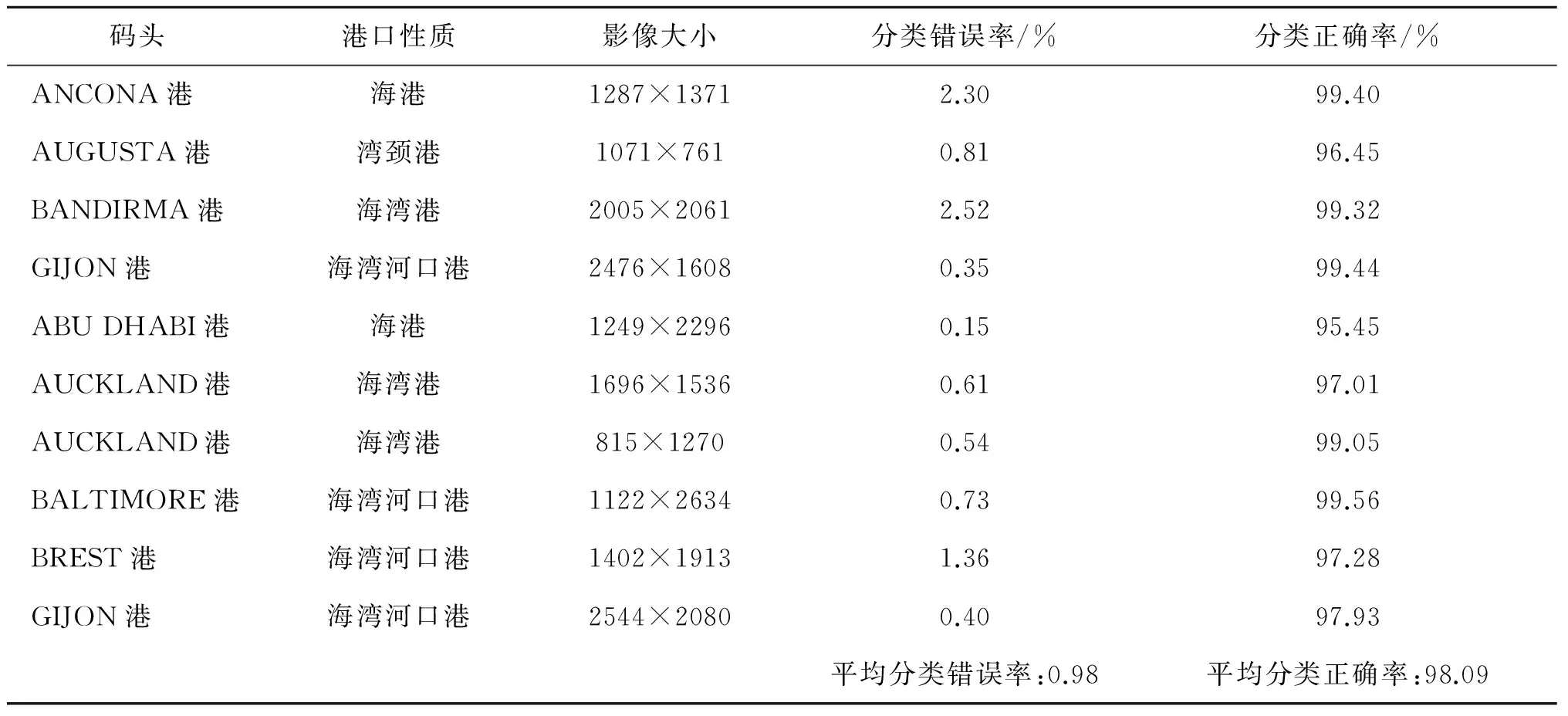
表1 码头目标提取精度评价表
从表中可以看出,码头遥感影像的图幅一般较大,如果直接对影像进行处理,既低效耗时,也没有必要,正是基于这点考虑,本文采用了半自动提取码头的思路,在提取前,先框选出含码头目标的感兴趣区域,然后只在感兴趣区域中进行码头提取处理。表中的码头目标较为稳定的低分类错误率和高分类正确率充分验证本文提出的岸舰分离方法的有效性,这也是和码头目标提取结果中多数舰船均能很好地从码头目标中分离出来这一目视效果相一致的。
4 结束语
本文面向高分辨率遥感影像,充分利用码头遥感影像特征,提出了一种码头轮廓的半自动提取方法。实验结果表明该方法能有效地提取出码头轮廓。本文码头提取方法仍需框选感兴趣区域这一交互过程,如何实现在大幅遥感影像上快速检测并提取出码头目标是下一步研究的方向。
[1] 洪承礼.港口规划与布置[M].北京:人民交通出版社,1999.
[2] 张永梅,周易,姜明.一种基于多元特征的海上目标分割方法[J].计算机应用与软件,2013,30(7):90-93.
[3] 方晓芙.遥感图像中战略目标识别方法研究[D].西安:西北工业大学,2004.
[4] 赵波.遥感图像目标识别算法研究[D].长沙:国防科技大学,2004.
[5] 周静.典型地海背景下目标识别方法研究[D].武汉:华中科技大学,2005.
[6] 韩理安.港口水工建筑物(I)[M].北京:人民交通出版社,2000.
[7] 王彦情,马雷,田原.光学遥感图像舰船目标检测与识别综述[J].自动化学报,2011,37(9):1029-1039.
[8] 曾文静,万磊,张铁栋,等.复杂海空背景下弱小目标的快速自动检测[J].光学精密工程,2012,20(2):403-412.
[9] 焦春雨,常文革.基于几何主轴和Hough变换的超宽带SAR二值边缘图像细化方法[J].遥感信息,2013,28(4):24-28.
[10] 陈琪.SAR图像港口目标提取方法研究[D].长沙:国防科技大学,2011.
[11] 陈海亮.基于特征的光学遥感图像舰船目标检测技术研究[D].长沙:国防科技大学,2010.
[12] 翟辉琴.基于数学形态学的遥感影像水域提取方法[J].测绘科学,2006,31(1):22-24.
A Wharf Contour Extraction Method for High-resolution Remote Sensing Imagery
MA Guo-rui1,JIANG Man-zhen1,2,SUI Hai-gang1
(1.StateKeyLaboratoryofRemoteSensingandInformationEngineering,WuhanUniversity,Wuhan430079;2.FujianSurveyandDesignInstituteofWaterConservancyandHydropower,Fuzhou350001)
This paper proposes a wharf contour extraction method for high-resolution remote sensing imagery.Firstly,it separates the sea area from the wharf images by sea-land segmentation.And then,based on the straight characteristic of wharf contour and the shape feature of inshore ships,it applies adhesion segmentation on the sea-land image to separate the inshore ships and wharf object to attain wharf object contour information.The experimental results show the effectiveness of the proposed method.
wharf extraction;sea-land segmentation;shore-ship separation;remote sensing imagery;information extraction
2014-07-15
2015-02-02
国家自然科学基金(61001187);国家863计划(2013AA122301);江苏省资源环境信息工程重点实验室开放基金(JS201302)。
马国锐(1979—),男,博士,主要从事遥感图像变化检测、目标要素提取的应用基础研究。
E-mail:mgr@whu.edu.cn
10.3969/j.issn.1000-3177.2015.05.004
TP751
A
1000-3177(2015)141-0026-05
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
散文诗世界(2022年2期)2022-03-10 19:07:20
舰船科学技术(2021年12期)2021-03-29 01:28:44
装备制造技术(2020年1期)2020-12-25 05:19:06
制造技术与机床(2019年11期)2019-12-04 05:50:54
青年文学家(2017年28期)2017-11-28 17:27:17
快乐语文(2017年35期)2017-02-18 18:08:36
数位时尚(幼儿教育)(2016年4期)2016-09-21 08:27:31
舰船科学技术(2016年1期)2016-02-27 15:39:26
计算机工程(2015年4期)2015-07-05 08:27:39