
国外非声探潜与隐身技术发展趋势*
2015-03-14 10:58师于杰任海刚
舰船电子工程 2015年1期
师于杰 任海刚
(中国船舶工业系统工程研究院 北京 100094)
国外非声探潜与隐身技术发展趋势*
师于杰 任海刚
(中国船舶工业系统工程研究院 北京 100094)
潜艇的非声特征包括潜艇自身的磁场特征、光学特征、雷达特征和红外特征,以及潜艇运动在周围水体中留下的“痕迹”——尾迹特征。论文从直接探测潜艇自身物理场特征和间接探测潜艇尾迹特征两个方面,对潜艇的非声特征和非声探测技术的发展进行了回顾,并分析了非声探测技术的对潜艇的威胁,展望了非声隐身技术措施及发展方向。
非声特征; 非声隐身; 尾迹隐身
Class Number U674.7+01
1 引言
长期以来,探潜技术的关注重点都在直接探测方面,即通过直接探测潜艇本身的物理场特征发现并识别潜艇目标。在海水介质中,声波(特别是较低频率的声波)的有效传输距离远远超过可见光、雷达、红外等电磁波。声波的这一特点使其成为探潜的主要手段。
早在二战时期,非声探测就已经成功应用于潜艇探测。如利用磁场异常探测(MAD),可以通过检测潜艇导致的地球磁场异常信号,发现处于水下航行状态的潜艇[1];利用雷达、红外探测手段,可以探测上浮充电状态的潜艇。非声隐身一直是潜艇综合隐身性能的重要组成部分。
近年来,为了满足广域监视(Wide Area Surveillance,WAS)的战略目标,间接探测技术蓬勃发展。所谓间接探测技术,是指通过潜艇对周围水体造成的影响——即潜艇运动过程留下的“痕迹”,间接地发现识别潜艇目标。间接探测技术的发展给潜艇带来了新的威胁,也对非声隐身技术的发展提出了新的需求。
本文从直接探测和间接探测两个方面论述了潜艇非声特征和非声探测技术,并对非声隐身技术进行了归纳总结。
2 潜艇的非声特征与探测技术
探潜技术根据其检测的信号源可以分为两类:直接探测和间接探测。所谓直接探测,是指通过检测源于潜艇本身的物理场特征,探测、发现潜艇目标。而间接探测,则是通过检测潜艇对周边环境造成的影响,间接地探测发现潜艇目标。
2.1 直接探测
声呐探测是最有效的直接探测手段。非声的直接探测手段主要是通过检测潜艇本身的磁场特征、光学特征、雷达特征和红外特征,探测发现潜艇目标。
1) 磁场特征
潜艇外壳和艇上设备大量采用铁磁材料,在地磁作用下形成由固定磁场和感应磁场组成的艇体磁场。磁场异常探测(MAD)可以通过检测潜艇磁场导致的地磁异常,发现处于水下航行状态的潜艇。
早在二战时期,同盟国就在关键航道布置了磁探仪,用于监视德国潜艇的进出。战后,磁场探测技术飞速发展,探测精度不断提高,有效探测距离不断增加。目前,MAD探测设备已经大量装备在反潜巡逻机、反潜直升飞机上。比如,美国的P-3COrion、俄罗斯的Tu-142、英国的NimrodMR-2、法国的Atl-2等反潜巡逻飞上都装备有MAD,美国的SH-60B、俄罗斯的Ka-27PL/Ka-28等反潜直升飞机上也都装备有MAD。在反潜巡逻飞机上,为了减小飞机磁性部件的影响,MAD通常安装在飞机尾部的尾锥末端。在反潜直升机上,MAD用电缆吊放在下后方25m~55m。目前,比较先进的MAD是美国P-3COrion飞机装备的AN/ASQ-208。它采用氦4光泵磁力仪,灵敏度可达3pT(1pT=10~12T),可有效探测潜深500m以下的潜艇。
2) 光学特征
可见光在水中具有一定的穿透能力。在海水澄清的太平洋海域,可见光可以到达水下约100m深度。但是,受到反射光干扰的影响,只有在近垂直方向上,才能有效地通过目视方式搜索水下潜艇。
近年来,激光雷达(LIDAR)探潜研究正成为新的热点。激光雷达采用类似雷达的工作原理,能够有效分离海面反射杂波对水下目标反射信号的干扰,具有较好的探测精度。并且蓝绿激光(450nm~550nm)在海水中具有良好的穿透率,在一定发射功率下可以获得更大的有效探测深度。因此,尽管存在易受云层、雾霾等气象因素影响的缺陷,蓝绿激光雷达探潜研究仍然成为了各国的研究重点。如图1所示。20世纪80年代,瑞典在近海海域成功的利用空中平台进行了LIDAR探潜的试验研究[2]。美国国防部下属的“先进防御研究项目机构”(US Defense Advanced Research Projects Agency,DARPA)曾开发并测试了用于水下探测的LIDAR系统(工作波长510nm),根据测试结果其最大有效探测深度可达200m[3]。澳大利亚也启动了LIDAR探潜项目,即LADS项目(Laser Airborne Depth Sounder),使用532nm的蓝绿激光进行水下目标探测[4]。
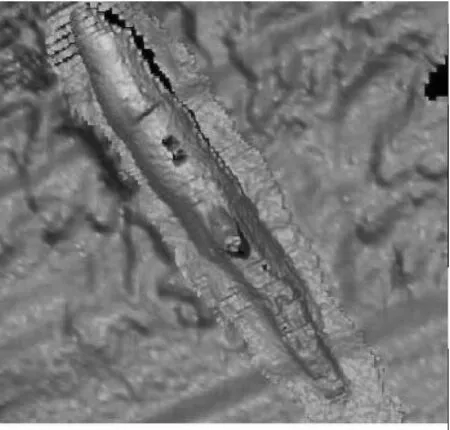
图1 激光雷达成像探潜
3) 雷达特征
海水对雷达波有较强的吸收作用,通常雷达波主要用来探测处于潜望航态以及水面航渡状态的潜艇。潜望镜的物理尺寸虽然较小,但是其雷达反射截面(RCS)却远大于其物理尺度。在不采用雷达隐身措施的条件下,潜望航态潜艇的RCS可达一百平方米以上。二战时期就已有利用雷达发现进而击沉潜艇的案例。1942年,英国军舰用271型雷达发现了在6400m距离上航行的德国潜艇U-252号,并将其击沉。现在,对海搜索雷达仍然是水面舰船反潜警戒网的重要组成部分。
4) 红外特征
常规潜艇采用柴电动力,在水下航行时利用蓄电池提供动力驱动螺旋桨推进。当蓄电池电量用尽后,常规潜艇需要上浮充电。此时,柴油发电机排放的高温废气和被废气加热的排气管道金属壁面会形成显著的红外辐射信号。通过红外探测设备(如机载红外吊舱等)可以探测发现处于通气管航态或上浮充电状态的潜艇。
随着不依赖空气推进(Air Independent Propulsion,AIP)潜艇的出现,常规潜艇水下潜航距离大幅度增长,未来的AIP潜艇甚至可能完全依赖AIP动力推进,不再需要上浮充电,大大降低了潜艇被雷达和红外探测发现的概率。
2.2 间接探测
物体在运动过程中,或多或少总会对周边环境造成一定影响,留下“痕迹”。通过检测潜艇在水下航行时留下的“痕迹”,就可以间接地确定潜艇的方位,实现对潜艇的间接探测。与潜艇自身的物理场特征相比,潜艇留下的“痕迹”特征通常都很微弱,但是其空间尺度常常较大。因此,潜艇留下的“痕迹”特别适合广域监视(Wide Area Surveillance,WAS)[5]。
在很长一段时间内,受到探测精度和处理分析能力的限制,间接探测都只停留在理论阶段。近年来,随着传感器技术和电子计算机的飞速发展,间接探测已经成为可能。首先是传感器技术的发展,使得对低强度微弱信号的检测成为可能;然后,电子计算机的跨时代发展(包括硬件计算能力的发展和软件分析处理算法的发展)使得原本不可能实现的大数据准实时处理分析成为可能。这样,通过安置在高空(无人机、卫星)的高精度传感器,可以实现对大面积海域的实时监视;并且在高性能计算能力的支持下,能够对大面积海域的监视结果进行自动的处理分析,从常规的背景中甄别出异常的“痕迹”特征,并通过识别算法辨别区分自然现象(如鱼群、海底火山)的影响,从而在广阔海域实现对潜艇的广域监视。潜艇的间接探测和广域监视技术已经成为未来探潜技术的重要发展方向之一。
潜艇运动时留下的“痕迹”主要包括水动力尾迹、生物光尾迹和热尾流尾迹。
1) 水动力尾迹
潜艇在水中运动时,在水面留下的波纹特征被称为潜艇的水动力尾迹,其强度取决于潜艇的航速、潜深和外形尺寸。水动力尾迹又可以分为三类:伯努利水丘、开尔文尾迹和内波尾迹。
当潜艇在较浅潜深下高速航行时,将会在潜艇上方水面产生一个丘状隆起,这种现象被称为“伯努利水丘”(Bernoulli Hump);在潜艇航行方向的后方,会形成呈“V”字形的尾迹,被称为开尔文尾迹。伯努利水丘和开尔文尾迹的尺度与航速和潜深密切相关。随着潜艇航速的降低以及潜深的增大,伯努利水丘和开尔文尾迹的尺度迅速减小。比如,当潜艇航行工况从航速20节、潜深50m改变为航速5节、潜深100m时,伯努利水丘的高度从6cm降低到1cm,开尔文尾迹的高度从2cm降低到无法测量[6]。伯努利水丘和开尔文尾迹随着航速的降低和潜深的增加迅速消失,而且其在水面形成的波纹尺度通常较小,并不适合作为广域监视的对象。
引起各国研究者重视的潜艇尾迹特征是内波尾迹。所谓内波,是指在温度跃层产生的周期性振动横波。在温度跃层内,温度梯度较大,海水出现“密度分层”现象。一般认为,潜艇的内波尾迹是由于潜艇对温度跃层的扰动造成的。当温度跃层内出现扰动,海水密度分层被搅乱后,不同密度的海水在浮升力和重力作用下在平衡位置附近产生周期性振动,形成内波。温度跃层内的内波振动会对表层海水产生调制作用,改变海面的粗糙度,在海面形成内波尾迹。温度跃层的内波振动在扰动源消失后仍可持续10~100min[2]。这也意味着当潜艇在水下经过时,有可能产生长达数公里的线状内波尾迹(与洋流、海底地形等扰动形成的片状内波尾迹具有显著差异)。这一特点使得内波尾迹成为间接探潜的研究重点。
SAR雷达(Synthetic Aperture Radar)可以有效地监视海面波浪特征和海面粗糙度的变化,可以成功检测内波尾迹。早在1978年,美国就将SAR雷达装上了Seasat卫星,并成功拍摄了内波尾迹的SAR照片[7]。其后,俄罗斯也发表文章,宣称掌握了使用SAR雷达检测水下潜艇的技术[8]。1992年,美俄举行了联合试验,通过ERS-1卫星验证了SAR雷达间接探潜的能力[9]。
2) 生物光尾迹
海洋中充满发光生物,当受到潜艇航行的扰动时,这些发光生物将发射生物光,其中的蓝绿分量可能穿透海水到达海面,形成可被观察到的生物光尾迹。潜艇的尾涡扰动和热尾流浮升作用,常常会将深处的发光生物带到较浅水深处,从而增加了生物光尾迹被观察到的概率[2]。1992年,美俄通过海上试验成功的利用光学传感器检测到了内波激励的生物光[10]。生物光尾迹最大的局限是其信号较弱,易受干扰。白天基本无法检测到生物光尾迹,即使在夜晚,有时月光也可能会对生物光尾迹的检测造成一定影响。
3) 热尾流尾迹
核动力潜艇通过汽轮机将核燃料产生的热能转化为动力和电能。根据熵增定律,汽轮机做功过程必须向外界排放废热。事实上,核燃料产生的热能中,超过75%将作为废热被排放到海水中;再加上艇上各种电子设备工作散热产生的热量,核动力装置产生的热功率除一小部分转化为潜艇的动能和尾涡湍动能外,绝大部分最终都将以冷却水的形式排入海水中。装机容量为190MW的核潜艇,其冷却水排放的废热可达188MW[4]。这些以冷却水形式排放到海水中的废热,在潜艇尾部形成温度较高的热尾流,在浮升力的作用下向海面浮升。
除核动力潜艇外,AIP潜艇也存在热尾流问题。AIP潜艇在AIP航态下采用AIP动力系统提供动力,同时以冷却水的形式排放废热。目前已经实现装备应用的AIP动力系统主要是瑞典的斯特林热机(SEAIP),法国的闭式循环汽轮机(MEAIP)和德国的燃料电池(FCAIP)。其中燃料电池的效率略高,可达60%;斯特林热机和闭式循环汽轮机的效率均在35%左右。特别是,斯特林热机和闭式循环柴油机在工作中不但要排放废热,还需要排放燃料燃烧产生的废气。废气的主要成分是微溶于海水的CO2,此外还包括少量不溶于水的O2和惰性气体。这些废气将大大加强热尾流的浮升能力。因此,虽然AIP动力系统的热功率远小于核动力潜艇,但是其热尾流特征也不可忽视。
当潜艇潜深较浅时,热尾流可能直接浮升至海面,形成长达数百米的“热斑”,可被高空侦察机和星载红外探测设备发现。早在1988年,俄罗斯研究人员就指出,对于潜艇而言热尾流红外探测是一种有效的非声探测方法[6]。美国最新的KH12型红外监视卫星能从350km的高空分辨出地面上0.1~0.15m大小、温差0.02℃的目标红外特征。进入21世纪以来,为实现对关键海域的全时监测,美国开始发展“天基红外探测系统”(SBIRS)项目,该项目的首颗地球同步轨道卫星已于2011年5月发射升空。
当潜艇潜深较深时,由于海水表层水温通常较高,热尾流在浮升到一定高度后,与周围水体的温差已经很小,因而不会在海面形成可观察的红外特征。但是,热尾流通常会产生50m~100m的浮升高度,在浮升过程中会产生远超于潜艇尾涡尺度的水体运动。热尾流的浮升运动更有可能在温度跃层中产生内波扰动和激励发光生物发光,是内波尾迹和生物光尾迹的主要诱因之一。
另外,有研究者指出,由于热尾流与周围水体存在明显的温差,可以通过蓝绿激光雷达(LINDAR)检测水下的热尾流。海水在激光的照射下会产生强烈的罗曼散射(Raman Scattering),散射光的强度与水温具有密切关系。因此,即使热尾流并没有浮升至海面,也可以通过蓝绿激光雷达检测到潜艇在水下排放的热尾流。澳大利亚的研究结果表明,使用激光雷达可以准确检测到水深50m以下、温差0.1℃的热尾流[4]。
3 潜艇非声隐身技术
1) 磁隐身
艇体磁场大约占潜艇总磁场的80%左右。因此采用低磁金属建造潜艇,可以大幅度降低潜艇的磁场特征。俄罗斯就曾采用钛合金建造潜艇。德国的U212A也采用了3964低磁钢作为艇体外壳材料。但是,钛合金价格昂贵,将大幅度增加潜艇的造价;低磁钢的耐压性能还需进一步提升,不适于建造大潜深潜艇。此外,采用低磁金属建造艇体还面临着加工、焊接工艺、结构强度校核等挑战。
通过消磁站定期消磁,可以将潜艇固定磁场控制在一定范围内。但是,一方面消磁站难以达到完全退磁的效果;另一方面消磁站只能消除固定磁场,对于感应磁场无能为力。即使经过消磁站消磁,潜艇的磁场特征仍然不可忽视。
采用艇载主动消磁设备可以进一步降低磁场特征。艇载主动消磁设备由消磁线圈、电源和控制台组成。主动消磁设备通过控制消磁线圈中的电流,主动产生一个与潜艇磁场大小相近、方向相反的补偿磁场,从而有效降低潜艇的磁场信号。主动消磁的关键在于艇体线圈的优化布置和消磁电流的精细控制,以达到“恰好”抵消艇体磁场的效果。对于常规潜艇,由于其能源有限,还必须在保证消磁效果的前提下尽可能降低消磁电源的功率损耗。
2) 光学隐身
目前光学隐身的主要途径是涂料。如以色列海军的海豚级潜艇(如图2所示),由于其主要作战区域是以色列周边的近海、浅海,因此采用了与周边海域水色接近的绿色涂料,提高其光学隐身性能。美国的海狼级潜艇(如图3所示),在其潜望镜和通讯天线的升降装置上也采用了迷彩涂料。

图2 以色列海豚级潜艇
3) 雷达隐身
雷达隐身主要针对的是潜艇露出水面的部分。包括:对通气管采用雷达隐身设计;在潜望镜升降装置采用透波材料或涂覆吸波涂料,潜望镜玻璃表面采用具有吸波能力的透光涂层;在潜艇围壳表面和水线以上部位采用具有雷达吸波能力的涂层等。

图3 海狼级核潜艇
4) 红外隐身
潜艇的红外隐身主要是针对常规动力潜艇,对其充电柴油机的排气进行红外抑制。通常采用海水喷淋系统,可以将充电柴油机的排气温度降低到150℃以下;采用水线下微孔排气装置,可以显著降低充电柴油机高温排气造成的红外特征。
5) 尾迹隐身
潜艇的尾迹特征包括水动力尾迹、生物光尾迹和热尾流尾迹。这些尾迹特征的形成原因无外乎两种:一种是潜艇运动排挤周围水体形成的水动力扰动;另一种是潜艇在水下排放废热形成的热尾流浮升运动造成扰动。相应的,尾迹隐身的主要技术途径就是要抑制、降低这两种扰动。
在降低潜艇对周围水体的水动力扰动方面,主要措施包括:对潜艇外形进行流体力学优化设计;采用可收缩水平舵;对围壳及附体采用流线型设计等。通过这些措施可以减少潜艇运动造成的尾涡,从而降低潜艇对周围水体的扰动。美国的核动力潜艇还采用了泵喷推进技术,在增加推进效率的同时,也大大改善了尾部流场,有利于降低对周围水体的扰动。
在降低潜艇热尾流浮升运动形成的扰动方面,主要措施是采用热封闭技术与热管理技术,对潜艇排放的热量进行控制管理。热封闭技术利用压载水仓的作为“热量仓库”,平时将热量封闭在压载水仓中,在安全区域再集中排放;热管理技术则是通过热量的回收利用,降低热量排放。比如德国的212A潜艇,一方面通过热管理技术回收利用废热,对液氧和储氢金属罐进行预热;另一方面通过热封闭技术将燃料电池AIP的废热封闭在压载水仓中,可以实现长达17h的热量封闭(不向艇外排放热量)。美国的洛杉矶型核潜艇也采用了类似的热封闭技术和热管理技术。
物体在运动过程中必然会对环境造成影响,潜艇的尾迹特征是不可能完全消除的。降低扰动只能在一定程度上减小潜艇的尾迹特征,不可能达到完全消除尾迹特征的目标。尾迹特征与潜艇的航速、潜深以及所处战场环境的水文条件具有密切的关系。根据当前的水文条件,合理改变潜艇的航速、潜深,可以有效降低尾迹特征被探测发现的概率。潜艇尾迹特征和安全潜深的预报是尾迹隐身研究的重点方向之一。
4 结语
非声隐身是潜艇综合隐身性能的重要组成部分。传统的非声隐身主要是磁隐身、视觉隐身,以及针对上浮状态的雷达隐身和红外隐身。随着间接探测技术的发展,通过星载LINDAR、SAR以及红外监视系统进行广域监视,通过潜艇尾迹特征探测潜艇已经成为可能。间接探测技术给潜艇非声隐身提出了新的要求。未来潜艇的非声隐身,不仅仅要抑制潜艇本身的物理场特征,对抗直接探测的威胁;还要考虑降低潜艇对周围水体的扰动,控制潜艇的尾迹特征,降低间接探测的威胁。
[1] Federation of American Scientists(FAS). Military Analysis Network, Air Anti-Submarine Warfare[M]. Magnetic Anomaly Detection(MAD) Sensors,1999:25-33.
[2] Stefanik. The Nonacoustic Detection of Submarines[J]. Scientific American,1988,3:27-28.
[3] Naval Mine Warfare. Sonars: still a bright future[J]. International Defense Review Supplement,1989,11:24-25.
[4] G. G. Wren, D. May. Detection of Submerged Vessels Using Remote Sensing Techniques[J]. Australian Defense Force,1997,127:8-15.
[5] Gale. The Potential of Satellites for Wide Area Surveillance of Australia, Air Power Studies Centre[R]. RAAF Fairbairn,1991:210.
[6] Stefanik. The Nonacoustic Detection of Submarines[J]. Scientific American,1988,3:29.
[7] Report of the SCOR Working Group[J]. Scientific American,1993,2:28.
[8] Beardsley. Making Waves[J]. Scientific American,1993,2:13.
[9] Gasparovic, R. F. Etkin, An overview of the Joint US/Russia Internal Wave Remote Sensing Experiment[R]. IGARSS’94,741-742.
[10] Titov, V. I. Investigation of variations of Long Surface Wave Parameters by Optical Techniques During JUSREX 1992[R]. IGARSS’94,1992:756.
Trends of Foreign Non-Acoustics Exploration Potential and Stealth Technology
SHI Yujie REN Haigang
(Systems Engineering Research Institute, CSSI, Beijing 100094)
The submarine’s non-acoustic characteristics include submarine’s own magnetic characteristics, optical characteristics, characteristics of radar and infrared features, and the trail characteristics that are the traces of submarine movement around the water. This article conducts a review on the developing technology of submarine’s non-acoustic characteristics and non-acoustic detection from two aspects which are the direct detection of submarines own physical characteristics and indirect detection of submarines field wakes features, and makes analysis on the threat of non-acoustic detection technology for submarines, and give prospects of non-acoustic stealth technology initiatives and the development direction.
non-acoustic characteristics, non-acoustic stealth, trail stealth
2014年7月7日,
2014年8月25日
师于杰,男,硕士,工程师,研究方向:舰艇(船)非声隐身总体技术。任海刚,男,博士,高级工程师,研究方向:舰艇(船)非声隐身总体技术。
U674.7+01
10.3969/j.issn1672-9730.2015.01.002
猜你喜欢
数学物理学报(2022年5期)2022-10-09
上海师范大学学报·自然科学版(2022年3期)2022-07-11
农业工程学报(2022年7期)2022-07-09
电子设计工程(2022年12期)2022-06-29
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年7期)2021-08-13
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
北京航空航天大学学报(2017年2期)2017-11-24
雷达学报(2017年6期)2017-03-26
