
动态指挥控制体系研究*
2015-03-14 11:01秦海军李敏勇
舰船电子工程 2015年1期
秦海军 李敏勇
(海军工程大学电子工程学院 武汉 430033)
动态指挥控制体系研究*
秦海军 李敏勇
(海军工程大学电子工程学院 武汉 430033)
兵力系统中指挥控制(C2)体系的相对稳定性与面对任务的多样性和复杂性使两者经常处于不匹配的状态,两者之间的匹配程度决定兵力系统完成给定任务的效能,解决不匹配的矛盾是C2创新的需要。针对不匹配的根源,提出了动态C2体系概念,在建立C2体系空间与任务构成空间的基础上,设计了动态调节律,提出的思路和研究方法是构建新型C2体系的新途径,结论在C2体系设计和作战系统效能分析中都具有理论和应用意义。
C2体系; 自同步; 指挥方法; 动态调节
Class Number E0-03
1 引言
指挥控制(Command Control,C2)体系是兵力系统中组织结构、信息流程、指挥关系、指挥方法等相关要素的总和,它构成兵力系统的核心组成部分。传统上C2体系一旦确定,在训练和应用中保持相对稳定,以求运作流畅和有效。但面对信息时代更为多样和复杂的作战任务,静态的C2体系已难以满足完成各种复杂和瞬变作战任务的需求,构建动态C2体系已成为必要的选择。动态C2是一种C2构成要素能实时适应任务特征、并能动态匹配调节、可最大限度满足作战资源发挥效能的一种未来的C2体系。C2是中性的,不存在最优也不存在最差的类型,适应任务的就是最好的,新一代C2体系应具备自适应和动态调节的特性已逐步成为军事学术界的共识[1~3]和实战条例[4]。与任务相匹配的C2体系是其功能有效性的保障,为实现C2体系与任务的匹配,可通过引入自适应、自调节机制,增强C2体系的灵活性,以应对复杂多变的环境因素。依据C2体系创新需求,下面从定量分析的角度研究动态C2的机理,建立框架和模型,并设计调节律。
2 任务构成
动态C2体系依据任务特征调节自身参数,因此分析任务构成是设计动态C2体系的前提。任务构成可在任务空间中表述,考虑到C2体系的控制要素、个体对任务适应性等方面,选择任务类型和时间压力两维分析任务构成。
2.1 任务类型
军事任务的分类与划分标准有关,在此分类目的是区分任务的复杂程度,因此涉及影响C2体系效能的任务特征、履行任务的个体因素、执行任务的信息支持能力等方面,综合权衡后选择标志任务特征的三个主要因素:
· 任务变化速率。指作战任务的变化跨度和阶段转换的多寡,一个任务可划分多个阶段,每个阶段又可分为许多环节,每个环节还可分为更细的不同操作,如果任务涉及的环节多、地域广、行动转换跨度大等,则任务的变化速率高,反之变化速率低。
· 对任务的熟悉程度。反映个体对任务的适应性,任务复杂性是相对的,与个体的训练、知识和能力等有关,个体对任务越熟悉、经验越多,则对其中的相互作用模式理解越透彻,决策权运用越有效率。
· 信息优势度。信息优势度描述关于任务的相对信息优势,C2体系的效能更依赖于信息的相对优势,这是竞争性任务特点决定的。

(1)
式中,e1为任务变化速率因素,取值为1≥e1≥0,任务的目标和环节越多,过程越复杂,e1越大,反之越小;e2为熟悉任务程度要素,取值为1≥e2≥0,个体对任务越熟悉,训练越有素,e2越小,反之越大;e3为信息优势度要素,取值为1≥e3≥0,相对信息优势越大,e3越小,反之越大;l1,l2,l3为复杂性要素的权重因子,取值为1≥li≥0(i=1,2,3),l1+l2+l3=1,反映各复杂性要素的影响程度。
(2)
2.2 时间压力

(3)
式中:Ta为完成任务的设定时间,由上级依作战任务决定;Te为完成任务时间的期望值,取决于执行节点的能力,是先验参数。
(4)
当压力指数ux大于0后,时间偏紧,小于0时,时间比较宽松。对于有最后期限的情况,设定时间应小于最后期限。
2.3 任务构成坐标系
将任务类型和时间压力参数作为两维构建任务构成坐标系,见图1,任务构成划分为四象限,每种任务依据两维的量化值,在坐标系上占据一个点。

图1 任务构成坐标系
3 C2体系
在考虑调控C2体系适应任务构成时,需要构建C2空间[5~7],其中的关键是要确定C2的可控参量,既要简洁、可控和易于量化,又要能刻画C2体系的本质。
3.1 C2空间坐标系
在考虑任务特征和分析C2体系可控因素后,确定C2空间的可控参量为指挥关系结构和耦合强度,定义如下:
指挥关系结构。即指挥相互作用联系的总和,可用网络图来描述,指挥关系结构具有层级的多寡、环路的数量和规模大小等差别,指挥关系结构越复杂,C2功能和适应性则越强,灵活性越高。
耦合强度。描述C2体系中指挥关系的特性,包括节点之间可容许的缓冲、松驰度和紧密度等内容,耦合强度主要与指挥方法有关,涉及权力配置问题,耦合紧密的系统权力集中,指令详尽,命令频率高,松散的系统的权力相对分散,指令简洁,决策权倾向现场。
以C2体系的指挥关系结构和耦合强度为状态,构成C2空间坐标系,见图2,将各维归一化到区间[-1,1]后构成四象限。各种不同的C2体系可看作空间中的一个点,原则上坐标系中的不同点是中性的,没有优劣之分,只有相对于任务的适用性。
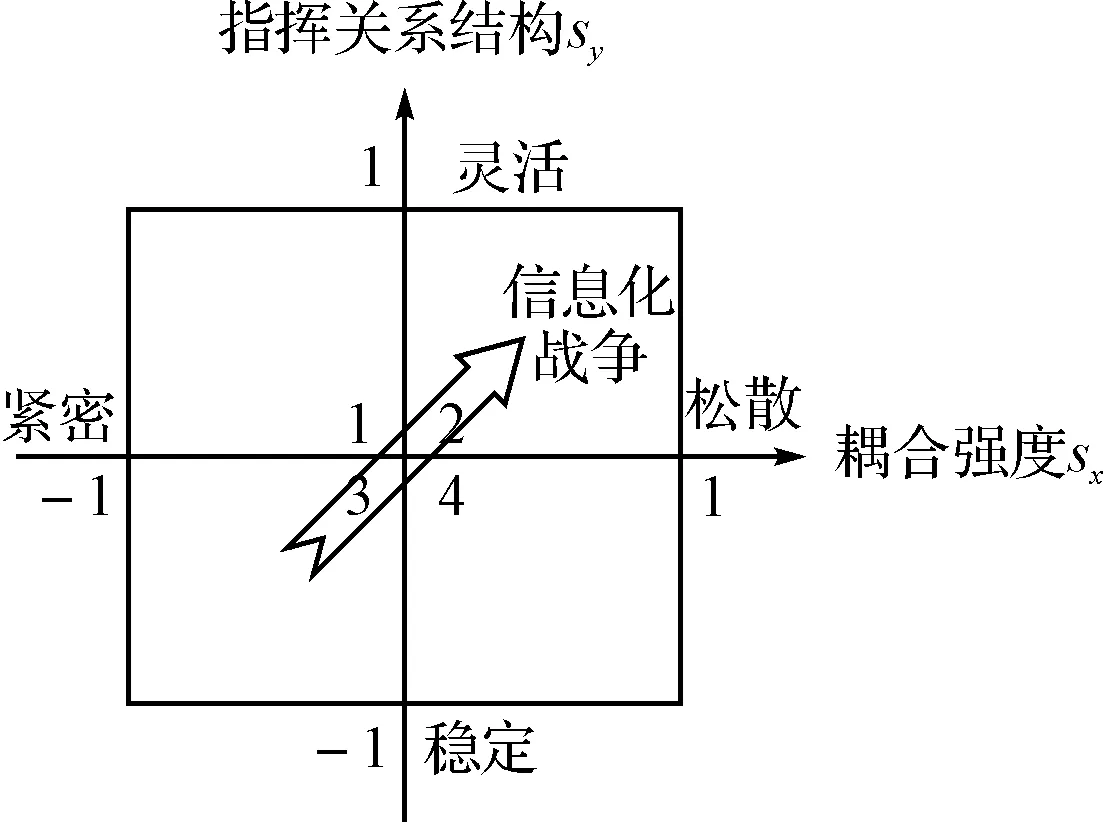
图2 C2空间坐标系
3.2 指挥关系结构
指挥关系结构是兵力系统中指挥关系和指挥链的集合,可用网络图的形式表示,见图3,如果两指挥节点之间存在指挥关系,则有指挥链相联,图中根节点为第1层指挥节点,内部节点为各层指挥节点,叶节点为执行节点。为适应信息化战争,常采用自组织、自同步的指挥方法,因此指挥关系结构不一定能用严格的树图来描述。为反映C2体系中的“自同步”功能,引入自同步指挥链路概念,两个叶节点非常规协调路径的长度是自同步指挥链路长度。为反映指挥关系结构的灵活性,引入扁平度和自同步能力概念。
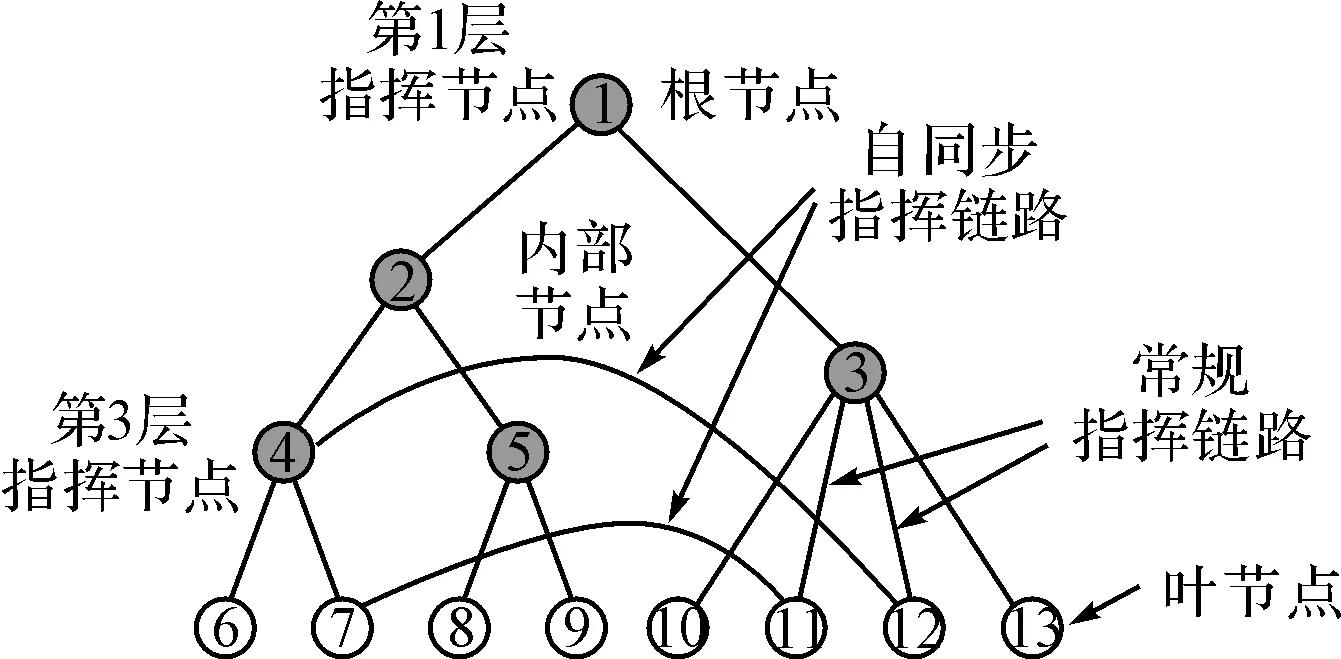
图3 C2结构的网络图
3.2.1 扁平度

(5)

由于平均指挥链长度与指挥网的规模有关,并不完全反映指挥关系结构的扁平化程序,还需要作归一化处理,以使得对指挥关系结构的描述具有可比性。引入指挥路径长度归一化系数k=log2(N/2),其中N是图G的节点数,可以证明,具有N个节点的对称树图的最大结构层数为k,从而指挥关系结构的扁平度可定义为
(6)
L″G的取值区间为[0,1],为方便设计调节律,将其扩展到区间[-1,1]后并倒向后得到扁平度LG为
LG=1-2L″G
(7)
式(7)描述了指挥网的相对扁平程度,数值越接近1,指挥关系结构越扁平。
3.2.2 自同步能力

(8)
Sc=2S′-1
(9)
从式(9)可见,自同步潜力越大,Sc越接近1,反之接近-1。
3.2.3 指挥关系结构的灵活性
为了用单一参数描述指挥关系结构的灵活性,引入灵活性参数sy,它由扁平度和自同步性能力综合而成。作线性综合,灵活性参数为
sy=g1Sc+g2Lcg1+g2=1,g1≥0,g2≥0
(10)
式中:g1为扁平度权重系数;g2为自同步性能力权重系数。
3.3 耦合强度
C2体系中节点之间的关系可以是隶属关系、磋商关系、合作关系等,在这里用耦合强度描述这种关系的紧密程度,通常集中指挥的耦合较为紧密,分散指挥的耦合较为松散。为定量描述耦合强度,引入越级指挥深度和命令频度的概念,越级指挥深度指直接命令延伸的平均层级数,深度越大,指挥方法更倾向于集中C2,反之倾向于分散C2。命令频度描述下达指挥命令的频率,频度越高,越倾向于集中C2,反之倾向于分散C2。
3.3.1 越级指挥深度
为简化问题,在此只考虑树网指挥关系结构,见图4,对其它结构形式可参照调整算法。在此定义越级指挥深度为越级指挥链长度和无越级时指挥链长度之比的平均值,即:
(11)

式(11)已进行归一化处理,β的取值区间为[-1,1],如果没有越级指挥,则β=-1,越级指挥情况越多,β越大。

图4 指挥关系树网
3.3.2 命令频度
命令频度描述上级对下级下达命令的速率,频度越高,越趋向集中指挥,命令频度用单位时间下达命令的次数来衡量。由于对不同的指挥层级,命令频度是有差别的,首先考虑第j层指挥节点的平均命令频度:
(12)

通过加权综合各层节点的命令频度后,指挥系统的命令频度为
(13)

式中:λ′为指挥系统的综合指挥命令频度;aj为第j层指挥节点关于命令频度的权重系数。
为适应后面的调节律设计,将式(13)中λ′归一化至区间[-1,1]:
(14)
从式(14)可见,下达命令的频率越高,命令频度λ越接近-1,反之越近1。
3.3.3 直接评估参数
由于实际测定指挥网的越级深度和命令频度有难度,可依据指挥方法的分类[8]直接设定,表1给出了指挥方法分类及对应的参数,这种设定是基于对指挥方法谱的线性分割,由于深度和频度参数与军事训练、指挥文化、指挥员个性、条令条例等因素有关,可由统计等方法获取,并满足(-1≤βi≤1),(-1≤λi≤1)。

表1 越级深度和命令频度分级和参数设定
3.3.4 耦合强度计算
越级指挥深度和命令频度反映了耦合强度的两个侧面,需要综合考虑,由于没有决定性的因素,在此作线性影响效果假设,从而耦合强度sx为
sx=h1β+h2λ,h1+h2=1,h1≥0,h2≥0
(15)式中h1和h2分别为越级深度和命令频度的权重因子。
4 动态调节
动态调节的功能是依据任务构成对C2体系进行调整,以最大限度发挥兵力系统的作战效能,调整的目标是最大限度地达成C2体系与任务构成的匹配。
4.1 匹配指数
C2体系和任务构成的匹配程度是调节的依据,这里引入匹配指数概念描述匹配程度。假定任务构成坐标为(ux,uy),C2体系坐标为(sx,sy),原则上采用增加C2体系灵活性应对任务复杂性、降低C2体系的耦合强度应对任务的时间压力方法,从而可用欧几里得距离衡量匹配程度,即定义C2体系和任务构成的匹配指数Ge为
(16)
实际上任务结构中的两个要素具有一定的互补性,时间压力增加和任务复杂性增加都会增加完成任务的难度,这可引入任务难度指数Ue来描述这种互补性,采用线性模型,任务难度指数可用任务空间两要素加权和来表示:
Ue=kxux+kyuy
(17)
式中kx、ky为加权系数,假定满足0≤kx、ky≤1和kx+ky=1。
同样,C2体系空间中两要素也有一定的互补性,松散耦合反映了权力的下放,也增加了C2系统的灵活性,引入系统结构的灵活性指数Se反映这种互补性:
Se=αxsx+αysy
(18)
式中αx、αy为加权系数,并且满足0≤αx、αy≤1和αx+αy=1。
考虑互补性因素的任务和系统的匹配指数Gc为
Gc=|Ue-Se|
=|kxux+kyuy-(αxsx+αysy)|
(19)
式(16)和式(19)描述C2体系和任务构成的匹配程度,可以利用这个指标值调节兵力系统中的C2功能。
4.2 调节方法
调节方法是根据体系和任务的匹配指数Gc(Ge)进行,设定阈值hG,当Gc(Ge)≥hG时,对C2体系中的结构和方法进行适当调整,否则不作调整。调整的参数包括:
1) 调整指挥关系结构参数:增减指挥层级,增删自同步链路。
2) 调整指挥方法参数:在集中指挥和分散指挥之间调整,从而改变越级深度和命令频度。
5 结语
通过调整C2体系以适用任务特征的思路和实践或多或少见诸于现实的一些军事行动特例中,但只停留在定性理解和朴素的实践阶段,动态C2体系概念的提出、建模和定量分析是开发未来C2体系的有益尝试,方法和结论是首创,但模型的粒度、可操作性等方面仍需有改进和完善。对模型进行仿真分析、确定各参数调整的阈值是进一步研究的内容。
[1] David S. Alberts, Richard E. Hayes. Understanding Command and Control[M]. Washington, DC: CCRP,2006.
[2] Keith G Stewart. The Evolution of Command Approach[C]//15th ICCRTS, Santa Monica, CA,2010.
[3] Philip S. E. Farrell, Ph. D., David Connell. Organizational Agility[C]//15th ICCRTS, Santa Monica, CA,2010.
[4] FM6-0. Mission Command[S]. Washington, DC: Headquarters, Department of the Army,2011.
[5] Keith G Stewart. Mission Command in the Networked Era[C]//11th ICCRTS, Toronto, CANADA,2006.
[6] NATO Research Task Group, SAS-065. NATO NEC C2 Maturity Model[M]. Washington, DC, CCRP,2006:29-41.
[7] David S. Alberts. Agiligy, Focus, and Convergence: The Future of Command and Control[M]. THE INTERNATIONAL C2 JOURNAL Vol. 1,Number 1,2007:8-11.
[8] 李敏勇.信息战与指挥控制[M].海军工程大学出版,2004:24-25.
Research on Dynamic Command and Control Systems
QIN Haijun LI Minyong
(College of Electronic Engineering ,Naval University of Engineering, Wuhan 430033)
Because of the relative stability of command control(C2) system in forces and the diversity, complexity of its facing tasks both are often in the states that do not match. The matching states decide the efficacy to complete the given task for forcessystem, it is necessary to resolve the contradiction for innovation in C2. Aiming at reasons for non-matching, the concept of dynamic C2 systems is put forward, a dynamic regulate law is designed on the basis of that C2 space and task space is constituted. The ideas and research methods develop fresh ways to build a new C2 system. The conclusion have both theoretical and apply value for C2 system design and combat system performance analysis.
C2 system, self-synchronous, command method, dynamic regulation
2014年7月5日,
2014年8月23日
秦海军,男,硕士研究生,研究方向:信息作战指挥。李敏勇,男,博士,副教授,硕士生导师,研究方向:信息作战指挥。
E0-03
10.3969/j.issn1672-9730.2015.01.001
猜你喜欢
辽宁工业大学学报(自然科学版)(2022年4期)2022-09-19
娃娃乐园·综合智能(2022年3期)2022-04-19
房地产导刊(2021年12期)2021-12-31
北京航空航天大学学报(2021年9期)2021-11-02
——入侵植物响应人为扰动的适应性进化方向探究
发明与创新(2021年2期)2021-01-19
网络安全和信息化(2019年1期)2019-12-22
电子制作(2019年16期)2019-09-27
军营文化天地(2018年2期)2018-04-20
妇女之友(2017年3期)2017-04-20
电脑爱好者(2016年22期)2016-12-16
