步进电动机加减速控制的查表算法研究
2015-03-12 09:25:10李东君
微特电机 2015年11期
李东君
(南京交通职业技术学院,南京211188)
0 引 言
步进电动机是一种开环控制元件,因其在工作过程中不产生累计误差,因此在工业控制领域中应用广泛。但在工业控制的加减速过程中,要防止“失步”与“过冲”现象,保证控制过程中平稳、快速、准确。本文针对板材切割类中小企业的实际情况,应用单片机控制技术,在现有普通剪板机的基础上开发了全自动控制系统,实现加工过程自动化,提高现代化水平。实践中发现,在控制过程中,加减速控制是改造过程的关键因素,因此,本文主要结合实际分析步进电动机加减速控制的关键技术,为中小企业进行剪板机的全自动改造提供重要参考。
1 步进电动机的等加等减速控制曲线
图1 为步进电动机常用的加减速控制曲线,实际控制过程中常常根据试验与经验获取。图1(a)为匀加速匀减速控制曲线,控制过程相对简单,编程方便容易实现。按直线加速时,加速度是恒定的,要求转矩也是恒定的,但因电机转矩与转速是非线性关系,故加速度与频率也是非线性关系,实际控制中,因转矩下降会造成“失步”现象。图1(b)为指数加减速控制曲线,该控制曲线是工业控制的最佳选择,主要是由于电机电机电磁转矩与转速控制关系类似指数规律[1]。

2 步进电动机查表法等加速等减速控制流程
考虑剪板机的生产实际,为了提高系统的响应速度,避免程序运算耽误步进电动机的运行速度,简化程序编制,采用查表法完成速度控制。查表法就是将离散升降速曲线获得的转速-时间常数序列,存放在程序存储器中,重置定时常数,实现加减速的快速控制,图2 为其加减速控制流程图。为了简化计算,减速时也采用与加速时相同的方法,取加速的逆过程设计[2]。
步进电动机位置控制的第一个参数是步进电动机控制的当前位置参数,通常是绝对位置。绝对位置是有极限的,其极限是步进电动机执行机构运动范围,超过极限则要报警。另一个参数就是从当前位置到目标位置的距离,将这个距离参数折算成步进电动机的步数。如图2 所示,电机起动时,若为正转,绝对位置减1,进行下一步,若越界则停机报警,若没有越界,继续走一步,判断是非加速,若没有则加速步数减1,直至加速步数减为0,则达到恒速过程,升速过程完成,减速过程参考加速逆过程,当减速步数减为0 时,则停机返回。

图2 加、减速控制程序流程图
3 指数曲线升降速查表法
步进电动机加减速控制曲线表达式:

式中:fq为实际起动频率;fm为最高运行频率;τ 为步进电动机加减速时间常数,一般升降速过程可认为相同。对于这种指数曲线的控制,使用汇编语言难度太大。采取离散法时,插入点受限,在实际控制中调试复杂,柔性调整其控制状态不方便。所以,一般应用类似的抛物型曲线进行理想曲线逼近,抛物曲线运算简单,单片机编程方便,故可对剪板机加减速控制过程进行实时控制[3]。
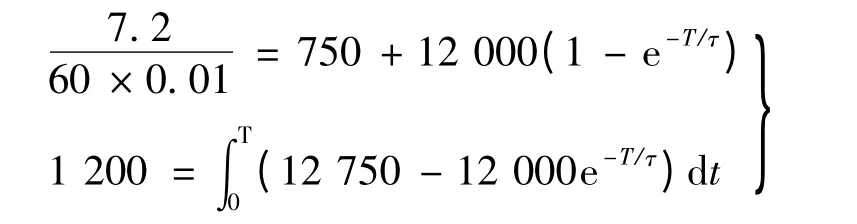
解得:T=0.138 051 3 s,τ=0.049 791 5 s。
假定时间的单位为s,以10-4s 为1 个单位,问题就可转化到[0,1 380.513]区间上,故采用查表法完成速度控制。设计时,根据指数曲线进行离散处理,计算过程分成12 级,每级100 步,为了顺利起动加一起动级。计算过程如下:

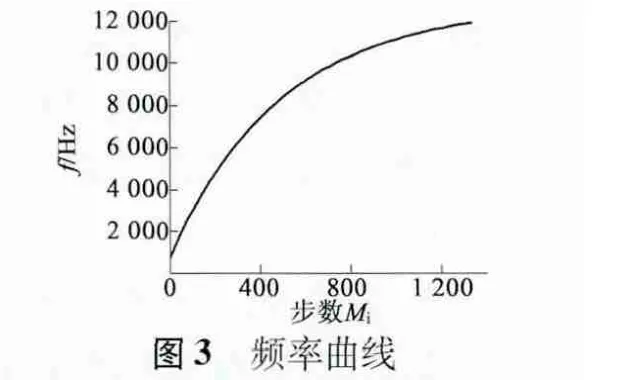
②计算级频率。Δti=ti+1-ti,Ti=Δti/100,fi=1/Ti,ti为t1,t2,…,t11;得f1,f2,…,f12,如表1 所示,频率曲线如图3 所示。
③根据频率计算定时常数。单片机主振频率fosc=12 MHz,预置数定时常数的计算用下式:t=(216-X)T。脉冲时间间隔t 为定时时间,X 为定时常数。计算定时常数如表1 所示。
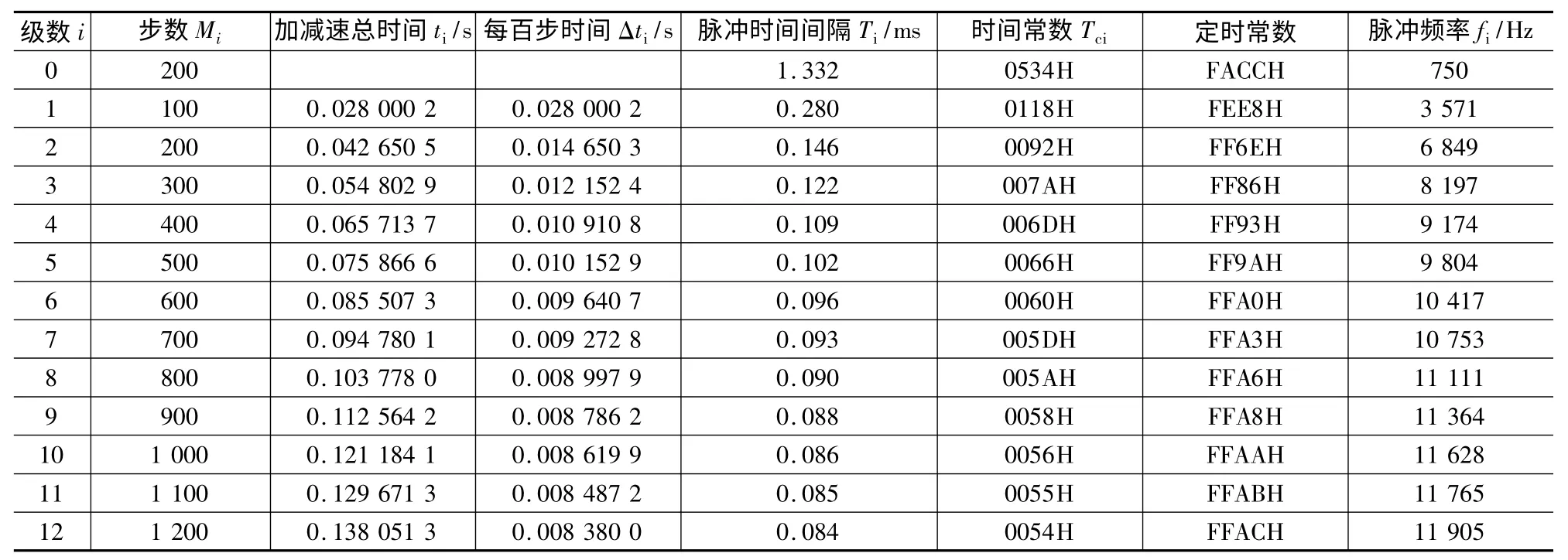
表1 加速、减速控制定时常数计算表
根据实际情况,为了解决提高定位速度和保证定位精度之间的矛盾,采用如下方法:把步进电动机定位过程分成两个阶段,即粗定位与精定位两个阶段,这两个阶段对步进电动机地控制都采取一样的频率脉冲,但选取不同的脉冲当量δ。实际应用时,粗定位阶段采取四相四拍运行,精定位阶段采取四相八拍运行。四相四拍运行阶段是指步进电动机加速段全部、高速运行段和减速段的部分,脉冲当量0.02 mm。当挡料器快移至接近目标时,可转换四相八拍运行,以提高定位精度,脉冲当量0.01 mm,让挡料器慢慢趋近于目标点。编程设计时注意步数计算和查表法中加减速步数设定(加速段全部和减速段部分的步数减半)[4]。
4 结 语
针对板材切割类中小企业的生产实际情况,本文通过分析步进电动机在全自动剪板机中的等加等减速控制曲线与控制流程,对比了梯形曲线与指数曲线控制特点,选择了最优的指数曲线对步进电动机进行控制,通过分析计算指数曲线的升降速控制参数,并列出计算结果,对指导中小企业进行剪板机的全自动改造具有积极的意义[5]。
[1] 杨红红,张琛. 步进电机自动升降速控制[J]. 电气自动化,2000,(6):14 -16.
[2] 崔洁等.步进电机加减速曲线的算法研究[J]. 电子工业专用设备,2013,(8):45 -49.
[3] 徐煜明.步进电机速度控制的研究与实现[J]. 工矿自动化,2007,(2):82 -85.
[4] 王建等. 步进电机加减速控制技术研究[J]. 工矿自动化,2006,(6):65 -67.
[5] 李东君.基于单片机技术的全自动剪板机研制[J]. 机械研究与应用,2005,(5):121 -123.
猜你喜欢
文萃报·周五版(2023年47期)2023-12-03 09:44:45
快乐语文(2021年15期)2021-06-15 10:19:38
数学年刊A辑(中文版)(2021年1期)2021-06-09 09:32:06
奇妙博物馆(2021年4期)2021-05-04 08:59:48
童话世界(2020年13期)2020-06-15 11:54:32
故事大王(2019年4期)2019-05-14 16:38:48
城市轨道交通(2019年2期)2019-04-04 08:55:54
小演奏家(2018年9期)2018-12-06 08:42:02
山西大同大学学报(自然科学版)(2016年4期)2016-11-27 02:20:55
新高考·高一物理(2016年3期)2016-05-18 16:16:56