
高性能永磁同步电动机的低成本简易正弦波控制
2015-03-12 09:23:22卢彬芳张耀中
微特电机 2015年5期
卢彬芳,黄 进,张耀中
(1.浙江大学,杭州310027 2. 浙江省微特电机节能降耗工程技术研究中心,杭州310027)
0 引 言
永磁同步电动机(以下简称PMSM)由于其控制性能好、调速范围宽、起动转矩大、体积小、功率密度大等优点,在洗衣机、空调、冰箱等家用电器领域得到广泛的应用[1]。永磁同步电动机是非线性、强耦合的复杂系统,在其控制方法中往往需要价格昂贵的高精度的位置传感器来获得精准的转子位置进行控制。但是在家用电器等需要尽量降低成本的领域,利用昂贵的位置传感器是不经济的,主要的解决办法分为两种:无位置传感器控制和带低精度位置传感器控制。而为了保证产品的安全可靠性,实际应用中更多地使用霍尔位置传感器来检测位置进行控制。
针对利用低精度的霍尔位置传感器进行转子位置检测的永磁同步电动机控制方法,国内外都进行了一些研究。文献[2]研究了用霍尔位置传感器得到转子位置信息,使用电流闭环的正弦波控制代替六步换向控制,并对转矩脉动进行分析。文献[3]提出了利用霍尔传感器进行位置估计,并使用SVPWM 的矢量控制方法。这些方法中都需要采样到准确的电流值进行解耦控制。也有学者提出了不需要电流闭环控制的PMSM 简易正弦波控制。如文献[4]对利用霍尔位置传感器进行转速预估实现PMSM 的简易正弦波控制进行了研究。文献[5]研究了无刷直流电动机的正弦波驱动控制,提出用120°导通方波起动切换到正弦波的方法,但存在切换转矩脉动大的缺点。
本文以一台应用于高性能波轮洗衣机的外转子表贴式隐极PMSM 为研究对象。首先建立了静止坐标系下的三相PMSM 数学模型。在此基础上提出了单转速闭环的简易正弦波控制策略,并对转速测量、超前角以及反电势前馈控制进行分析,接着分析了电机起动和制动方法,并提出了'类似方波起动'方法。通过实验验证了所提出的简易正弦控制算法具有转矩脉动小,效率高,起动切换平滑、稳定,制动快速可靠的特点。
1 PMSM 简易正弦波控制数学模型
本文以一台三相永磁同步电动机为研究对象,图1 为三相电压源逆变器供电的驱动系统主电路结构图。其中电阻R1 用于消耗电机制动时回馈的能量。R2 和R3 用于对电机A、B 相电流进行采样,C相电流可由A,B 两相电流值重构而得。
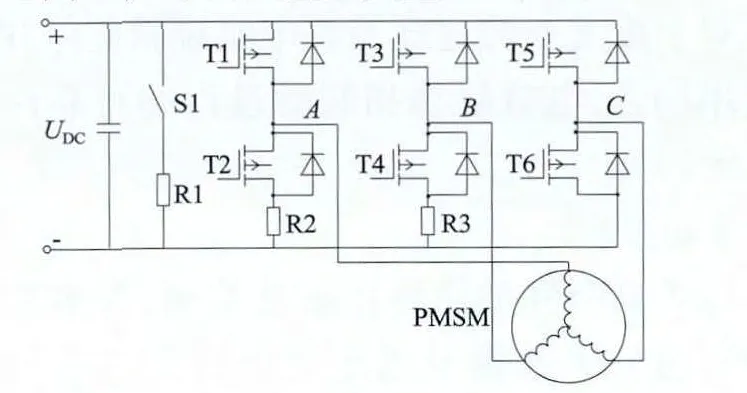
图1 三相PMSM 驱动系统结构图
对于本文所提出的简易正弦波控制策略,电机数学模型是建立在静止坐标系下的。其中,电机的电压方程可以表示:
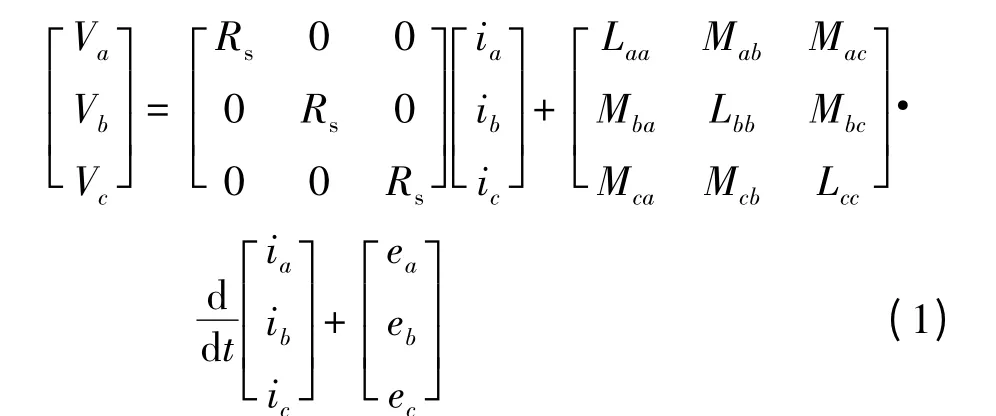
式中:V,i,e 分别表示电机三相定子绕组相电压、相电流以及反电动势;Rs为定子电阻;L 表示各相自感;M 表示各相之间的互感。其中反电动势方程:

式中:ψm为转子永磁体产生的磁链;θ 为转子位置;ω 为转子电角速度。
电机的电磁转矩公式:

式中:Te为电机电磁转矩;Pm为输出机械功率;Ω 为转子的机械角速度;p 为电机极对数。由式(2)可得PMSM 的反电动势是正弦波。又由式(3)可以看出,当电机三相电流与对应三相反电动势波形一样都为理想正弦波时,并且相位关系都一致时,才能使得电磁转矩输出最大,同时转矩脉动最小。所以使用正弦波控制能够有效减小电机的转矩脉动[6]。
2 PMSM 简易正弦波控制策略分析
对于洗衣机等控制精度要求不高的应用场合,本文利用低成本的霍尔位置传感器进行转子位置检测足够满足要求。并利用采样电阻进行电流检测,用于系统过流保护。本文提出的低成本简易正弦波控制,控制结构图如图2 所示。
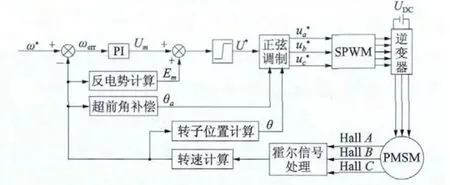
图2 简易正弦波控制结构框图
如图2 所示,给定转速由上位机给定,电机实际转速根据霍尔信号计算得到,进而算得转子的位置。为了提高效率,提高转矩输出,加入了超前导通角补偿。同时引入反电动势前馈控制,可以有效抑制电机运行过程中反电势波动造成的扰动,加快动态响应。
2.1 转速及位置估计
由于使用的是霍尔位置传感器,PMSM 的简易正弦控制的电流换向逻辑可以参照无刷直流电动机的“六步换向”。电机正转时三相正弦电流与霍尔信号的逻辑关系如图3 所示。电流一个周期被分成如图3 所示的六个区间,通过读取连接到DSP 的三个霍尔信号的高低电平组合逻辑,可以判断电机转子正处于哪一个区间里面。由于在产品实际生产过程中并不能保证三个霍尔传感器的安装都刚好相差120°电角度,有时会有一定的偏差,但是一个霍尔信号的180°区间总能够是保证对称的[7]。所以本文只利用其中一个霍尔信号来进行测速。
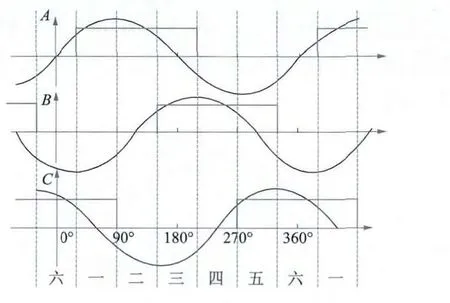
图3 相电流与霍尔位置关系图
本文使用T 测速法进行测速,霍尔信号连接到DSP 的GPIO 口,通过设定上升沿和下降沿双边沿触发产生外设中断,利用计数器进行计数,设两个边沿之间计的数为M,DSP 计数器时钟频率为f0,则转速计算公式:

转子位置计算公式:

式中:θs为根据霍尔状态信息判断的转子所处在区间的起始角度。θi为在该60°区间内的角度增量,由电角速度与时间的积分得到,并限定θi≤60°。
2.2 超前角补偿
电机的电磁转矩是由定子磁链和转子磁链之间作用产生的,其公式:

式中:k 为由电机参数求得的系数;ψs,ψr分别为定、转子磁链;α 为定转子磁链间的夹角,可以看出当夹角为90°时,输出转矩最大。
由于简易正弦波驱动控制,只是保证电压输出矢量与转子磁链垂直,但是PMSM 是感性负载,定子电流会滞后于定子电压矢量。由于ψs是与定子电流同方向的,所以ψs也滞后于定子电压矢量,从而使得磁链夹角α <90°,输出转矩不是最大。
为了解决这个问题,在正弦调制电压中,角度计算引入超前角补偿。使得α 尽量接近90°,从而增大输出转矩,提高电流的有功分量,电机效率提高[8]。
图4 为电机等效电路图,等效电压方程可以表示:
式中:Ls为定子等效电感;TL为负载转矩;CT为转矩常数。从以上两式可以看出,定子电流矢量滞后于定子电压矢量的角度变化与转子角速度ω 以及电机所带的负载有关。从而引入的超前补偿角θa的大小根据转速和负载的不同,结合实验方式进行校正调整。

图4 电机等效电路图
2.3 反电动势前馈控制
本文使用PI 调节器进行单转速环闭环控制,由于所设计PI 控制器作用具有一定的频带范围,在电机动态过程中,反电动势的变化会给电机带来一定的扰动[9],通过加入反电动势前馈控制,不仅能有效抑制反电动势引入的扰动,还能够减轻PI 调节器的负担,加快动态响应。引入的反电动势:

从而,图2 中的三相调制电压可以表示为:
3 起动和制动分析
对于像洗衣机这样需要电机频繁起停并正反转的应用场合,电机起动和制动过程的可靠性是至关重要的。
3.1 起动分析
对于PMSM 的简易正弦波控制,大多数的研究都是利用120°两两导通的无刷直流电动机式方波起动方式,每一时刻只有两相开通,另一相的上下桥臂都关闭,然后到达一定转速后再切换到正弦波控制。这样的控制方式,程序结构复杂,而且存在着切换过程中转矩脉动较大的缺点。为了解决这个问题,本文提出“类似方波起动”方式,电机全速范围内都使用正弦波闭环控制算法,保证可靠起动的同时,抑制了切换过程引起的转矩脉动。
起动阶段,首先根据霍尔信号判断转子所处的60°区间,由于电机停止,不能得到具体的角度位置。为了保证转子位置在区间内各位置都能有足够的起动转矩,起动阶段在每一个60°区间内都保持着选取该区间的中间位置值作为转子的位置。如图3 所示,有的区间的中间位置的正弦值正好为零,从而得到的起动电流波形电流为如图5 所示的方波波形,波形类似于120°导通的方波控制波形。达到一定转速后,再切换到计算各处精确位置的正弦波控制。

图5 电机起动电流图
3.2 制动分析
洗衣机用PMSM 制动主要可以分为机械制动和电磁制动两种。机械制动主要是靠电机外部加刹车片进行刹车,但是存在刹车片容易损坏的问题。电磁制动是通过变频器控制电机进行刹车,常用的可以分为短接制动、反接制动和回馈制动三种[10]。
短接制动:三相上桥臂同时关断,下桥臂同时开通,能量全部消耗在电机定子内阻上。
反接制动:直接给三相输入反向的电压矢量,制动电流较大,停机速度快,能量消耗在电机定子内阻上。
回馈制动:在电机从高速降低到低速的过程中,电机处于发电状态,向直流母线侧回馈能量。由于使用的是不控整流,能量不能回馈到交流侧,使得母线电压升高,为了防止过高的泵升电压损坏系统,通过能耗电阻来消耗回馈的电能。
根据系统控制要求,合理地选取上面三种制动方式,以及可以配合使用各种制动方式。
4 实验结果与分析
本文利用一台6 对极、功率170W 的外转子PMSM 为实验电机,安装在波轮洗衣机上进行加载实验。以TI 的TMS320F28027 为控制核心搭建了控制电路,图6 是电机起动电流波形。本文所提出的类似方波起动方法在带载下能可靠起动,切换电流平稳,切换转矩脉动小。

图6 电机起动电流
图7 是没有加超前角补偿时在700 r/min 下的稳态运行相电流波形,图8 是加入适当的超前角补偿时在700 r/min 下的稳态电流波形。从两图对比可以发现,没加超前角补偿时的电流幅值为2 A,加入超前角补偿时电流幅值约为1.5 A。加入超前角补偿,提高了电流的有功分量,输出转矩增大,电机效率提高,所以相同负载下相电流较小,而且波形更加正弦。
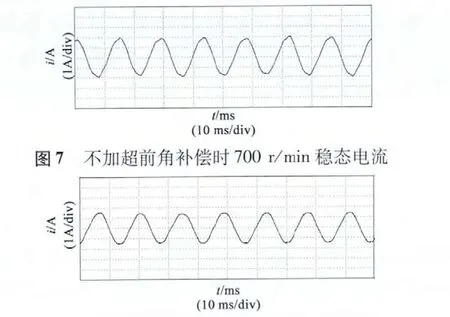
图8 加超前角补偿时700 r/min 稳态电流
图9 是电机短接制动时电流波形与3 个霍尔信号波形。利用霍尔信号高低电平的宽度能比较清晰判别电机转速下降快慢。图10 为反接制动的电流波形,其中为了防止电机出现反转,在转速降到比较低时切换到短接制动,电机停止。图11 是回馈制动电流波形。从3 种制动方式波形可以看出,3 种制动方式都能快速停下电机,其中反接制动下,制动电流最大。由于短接制动和反接制动的能量都消耗在电机定子绕组上,影响了电机的寿命。回馈制动的能量,通过母线上的制动电阻来消耗,所以在大多数场合使用回馈制动作为电机的制动方式。
5 结 语
本文提出了基于DSP 的PMSM 的低成本简易正弦波控制策略,利用低成本霍尔位置传感器对PMSM 的转子位置进行估算。详细分析了简易正弦波控制策略,以及电机起动和制动过程。实验结果表明,本文所设计的简易正弦波控制控制系统稳定可靠,起动平滑,转矩脉动小,噪声小,效率高。对于家电等低成本要求领域,本文所提出的低成本正弦波控制算法具有广阔的应用前景。
[1] 谭建成.永磁无刷直流电机技术[M]. 北京:机械工业出版社,2011:1 -5.
[2] BATZEL T D,LEE K Y. Commutation torque ripple minimization for permanent magnet synchronous machines with Hall effect position feedback[J].IEEE Transactions on Energy Conversion,1998,13(3):257 -262.
[3] LIDOZZI A,SOLERO L,CRESCIMBINI F,et al. SVM PMSM drive with low resolution Hall-effect sensors[J].IEEE Transactions on Power Electronics,2007,22(1):282 -290.
[4] 黄腾云,姜淑忠,李小海. 采用霍尔传感器的PMSM 成本控制系统[J].微特电机,2012,40(1):19 -21.
[5] 马瑞卿,李颖,刘冠志.基于dsPIC30F2010 的无刷直流电动机正弦波驱动系统设计[J].微特电机,2010,38(8):11 -14.
[6] 李运德,张淼.正弦波驱动无刷直流电机转矩脉动的究[J].电力电子技术,2010,44(12):79 -81.
[7] 薛刚.洗衣机用永磁电机系统研究与设计[D]. 上海:上海交通大学,2011:26 -28.
[8] 薛利明.低成本高性能永磁同步电机控制器的研制[J].微电机,2005,38(5):98 -100.
[9] 杨明,牛里,王宏佳,等.微小转动惯量永磁同步电机电流环动态特性的研究[J].电机与控制学报,2009,13(6):844 -849.
[10] 梁文毅.永磁同步电机伺服控制系统的研究[D]. 杭州:浙江大学,2006:74.
猜你喜欢
四川工商学院学术新视野(2021年2期)2021-11-02 06:17:18
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
电子制作(2019年7期)2019-04-25 13:18:18
汽车电器(2019年2期)2019-03-22 03:35:16
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
太空探索(2015年6期)2015-07-12 12:48:42
电测与仪表(2014年16期)2014-04-22 05:20:10
河南科技(2014年11期)2014-02-27 14:09:47
世界科学(2013年6期)2013-03-11 18:09:39
科技创新导报(2012年15期)2012-04-29 19:36:25
