
内置式永磁同步电机的无差拍直接转矩控制
2015-03-12 09:23王雅璐邵如平
微特电机 2015年5期
王雅璐,邵如平,文 壮,汪 璐
(南京工业大学,南京211816)
0 引 言
内置式永磁同步电机(以下简称IPMSM)近年来应用愈发广泛,因其具有如下优势:其磁场由埋在转子中的永磁体产生,没有转子电流,因此不存在转子电流损耗;具有更高的磁通密度,其可以产生更高的电磁转矩;简单的转子阻尼较低,可以获得更好的动态特性[1-2]。正因如此,通常需要转子位置信息来实现高性能的电机控制,一般位置信息由位置传感器获得,这不仅增加了生产成本,同时降低了系统稳定性,因此涌现了许多无位置控制方法。
近年来,直接转矩控制(DTC)作为一种理论上的无位置控制方法得到了长足的发展[3-4]。直接转矩控制系统中,磁通和转矩观察器观察所得的定子磁通矢量和转矩作为系统反馈量。根据开关表,通过磁通和转矩误差,确定出合适的电压矢量,进而调整定子磁通的振幅和相位,以控制IPMSM 的电磁转矩。开关表作为DTC 的关键环节,为控制系统提供转矩需求量、磁通需求量和定子磁链位置间的关系。通过开关表,转矩可以被直接控制。但因为系统中使用了磁滞控制器,开关频率不固定,控制难度大[5-8]。
基于以上研究和问题,本文提出了一种适用于IPMSM 电机的无差拍直接转矩控制方式,固定了开关频率,并减小了转矩脉动,实现更简单易行的IPMSM 驱动控制。
1 DB-DTC 控制器设计
1.1 理论分析
无差拍直接转矩控制(以下简称DB -DTC)是一种时间离散控制器。在该方法中,磁通和转矩反馈仍来自磁通和转矩观察器,不同的是电压矢量的获取方法。DB -DTC 通过对这一时刻的转矩和磁通估计值进行计算,从而得到下一时刻的电压矢量,进而驱动电机,而非从开关表中选取得到电压。这样的好处是能使系统有一个固定的开关频率;在固定开关频率下的转矩脉冲同样可以固定。这将使得对电机的控制难度大大降低,相比直接转矩控制方法,DB-DTC 方法更为简单可靠。
DB-DTC 方法的控制流程图如图1 所示。在k-t 时刻测量得电流、定子磁链及其他数据(t 为测量所需时间),通过所获数据预测k 时刻的电流值;在k 时刻,通过k 时刻的电流值预测k +1 时刻的电流值,并计算电压参考量;在k+1 时刻,向电机施加计算出的电压参考量,系统转矩在k +2 时刻达到k时刻的参考转矩。

图1 DB-DTC 方法控制流程
在k+1 -t 时刻,重复上述动作:测量得电流、定子磁链等数据,预测k+1 时刻的电流值;在k +1时刻,预测k+2 时刻的电流值,并计算电压参考量;在k+2 时刻对电机施加该电压参考量,在k +3 时刻达到系统k +1 时刻的参考转矩。不断重复此过程,以控制调整电机的运行状态。
该方法的应用基于一个重要假设,转矩能够在一个周期内达到参考值。
在实现过程中,需要完成电压参考量的计算和电流预测器的设计。计算电压参考量需要定子磁通和转矩,因此磁通观察器、转矩观察器必不可少。
1.2 数学建模
1.2.1 观察器方程
当定子磁链和转矩已知,可以计算定子电压。因此,需要对磁通观察器和转矩观察器进行数学建模。磁通观察器方程可由IPMSM 磁通方程直接给出:

式中:λds和λqs分别代表d 轴与q 轴上的定子磁链;ids和iqs分别代表d 轴和q 轴上定子电流;Ld和Lq分别代表d 轴和q 轴上的电感;λpm代表由转子永磁体产生的磁链大小(上标r 代表使用的电机转子侧)。
转矩观察器方程由IPMSM 转矩方程直接给出:

式中:Tem为电机电磁转矩;P 为极点个数(非极对数个数)。
1.2.2 电压参考量方程
首先,IPMSM 的基本方程[9]:

式中:vdqs代表d 轴和q 轴上分别的定子电压;Rs代表定子绕组阻值;idqs代表d 轴和q 轴上分别的定子电流;λdqs代表d 轴和q 轴上分别的定子磁链,具体表达式同式(1);ωr代表转子的电角速度。
将式(3)转换,得出定子磁链和定子电流的表达式,代入式(2),再对其求导。假设转矩线性变化,将求导所得方程离散化,得到式(4)。
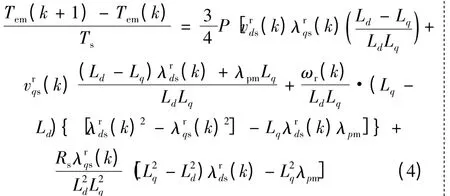
另一方面,基于DB-DTC 假设,转矩误差可写:

将式(5)代入式(4)中,可得电磁转矩误差和d轴与q 轴的定子电压关系如下:

通过上式,可以计算影响转矩的电压参考值。但是,因为d 轴与q 轴上的电压均未知,因此计算参考电压矢量还需要联立参考磁通方程。
已知IPMSM 磁通方程如下:

基于DB -DTC 的基本假设,磁通参考量可以通过如下方程计算:

将式(9)代入式(10),可得:

联立式(6)和式(11)可解得电压参考量。
1.2.3 电流预测器方程
在磁通和转矩观察器中,k +1 时刻的定子电流必须为已知量。然而控制器采样时刻为k -t 时刻,为了克服离散系统测量和计算时所带来的控制周期的误差,必须进行电流预测器的设计。
电流预测器需要完成在k -t 时刻对k 时刻电流值的预测,以及在k 时刻对k+1 时刻电流值的预测。后者较为复杂,先进行讨论。
已知:
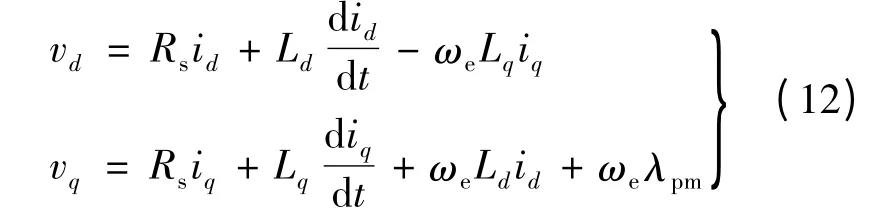
假设电流线性变化,将式(12)离散化,从k 时刻到k+1 时刻对时间t 进行积分,即可得到从时刻k 到时刻k+1 的电流预测方程,如下:

从时刻k-t 到时刻k 的电流预测方程与上式相似,只是因为t 的时间非常短,省略积分步骤即可。
实际中电流的变化不是线性的,公式中的电流应使用平均值,但对电流进行积分会使结果更为精确。
2 仿真及其结果
在上述无差拍直接转矩控制的数学建模基础上,本文搭建在MATLAB 中仿真模型。DB - DTC系统仿真图如图2 所示,控制器仿真图如图3 所示。
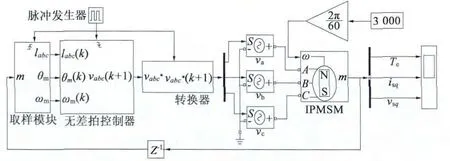
图2 DB-DTC 系统图
IPMSM 电机模型来自Simulink Library,参数设置如表1 所示。测量模块由总线选择器建立。各个观察器及复杂计算式均集成为子系统。仿真时间为0.2 s,参考速度3 000 r/min,参考转矩在0.05 s 时由0 达到7 N·m,采样频率10 kHz,仿真频率1 000 kHz,测量延时0.001 ms。仿真结果如图4 ~图6 所示。
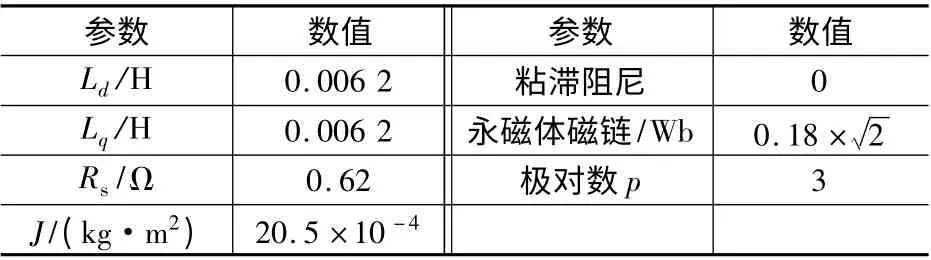
表1 IPMSM 参数
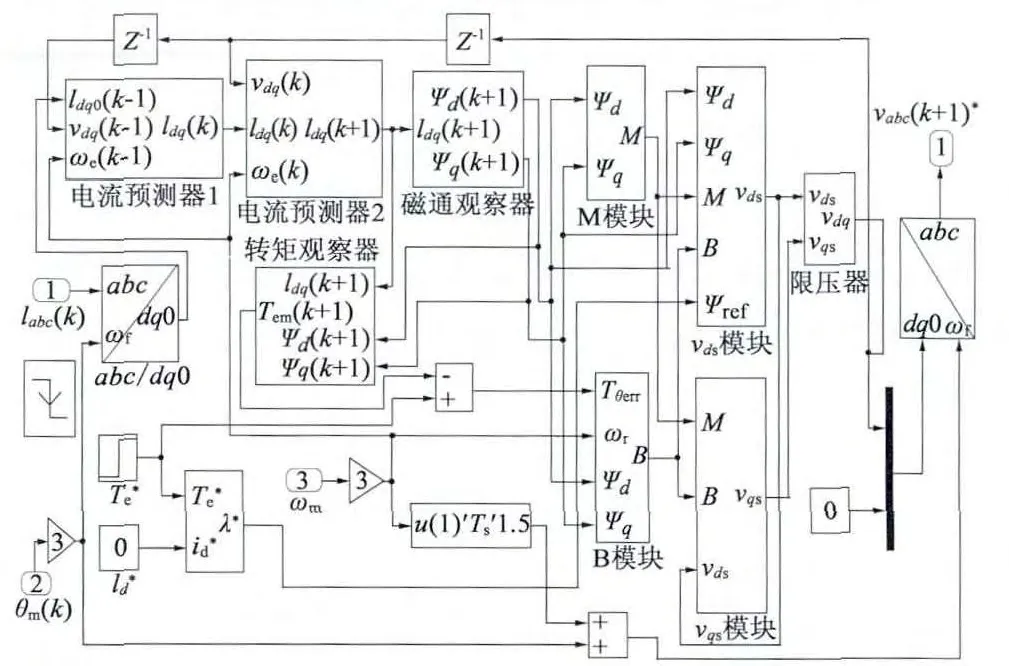
图3 DB-DTC 控制器

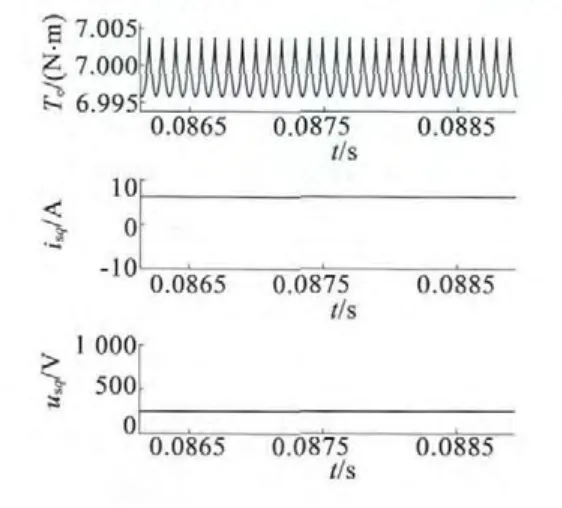
图6 稳定状态放大
由图4 可知,DB -DTC 控制器可正常工作,可以达到对IPMSM 电机的稳定起动控制;由图5 响应部分放大图可以看到,系统完成转矩响应的时间小于0.000 3 s,曲线平滑,没有大幅度振荡;由图6 稳定状态放大图可以看到,转矩脉动小于±0.005 N·m,定子电流电压值恒定,电机工作稳定。
为了方便比较,给出DTC 控制方法的部分仿真结果如图7 所示。
由图7 可以看到,DTC 控制方法的开关频率在不断变化。图8中,在0.9 s时系统给电机施加7 N·m 的负载,转矩上升以保证转速不变。转矩可变且变化前后转矩脉动较大(约±1 N·m)。
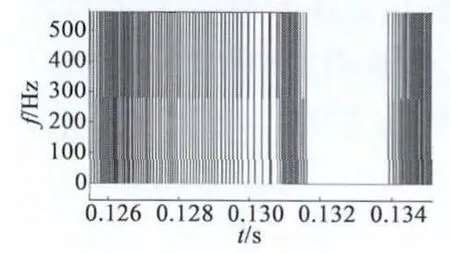
图7 开关频率(A 相)
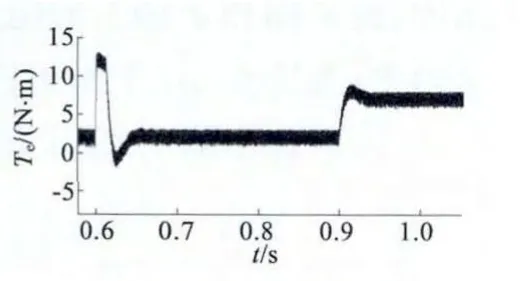
图8 电机转矩反馈
比较可知,DB -DTC 控制方法具有频率固定,响应时间短,转矩脉冲小,电机起动及工作稳定,控制效果明显优于DTC 控制方法。
3 结 语
本文就IPMSM 的控制方法进行了讨论,着重介绍了无差拍直接转矩控制方法,在IPMSM 离散化状态方程的基础上,结合无差拍控制原理,对其进行了数学建模与实验仿真,并将仿真结果与直接转矩控制结果做比较。
实验证明,本文所设计的电流预测器工作良好,该DB-DTC 方法可精确估计出定子磁链和转矩,进而计算出定子端的电压矢量,保证了系统的控制精度;同时系统具有固定的开关频率,动态响应快且转矩脉动小,具有优异的动态和稳态性能,解决了DTC 方法存在的问题。
[1] 唐任远.现代永磁电机理论与设计[M]. 北京:机械工业出版社,1997.
[2] JAHNS T M,KLIMAN G B,NEUMANN T W. Interior permanent-magnet synchronous motors for adjustable - speed drives[J].IEEE Transactions on Industry Applications,1986,22(4):738 -747.
[3] RAHAMAN G a M F. A novel speed sensorless direct torque and flux controlled interior permanent magnet synchronous motor drive[C]//Proc of IEEE Power Electron.Spec.Conf.2008:50 -56.
[4] FRENCH C,ACARNLEY P. Direct torque control of permanent magnet synchronous drives[J]. IEEE Transactions on Industry Applications,1996,32(5):1080 -1088.
[5] 邱鑫,黄文新,卜飞飞.内置式永磁同步电机宽转速范围无位置传感器直接转矩控制[J].电工技术学报,2014,29(9):92 -99.
[6] 甘良志,伍斌,姜来东.采用模糊控制器的直接转矩控制系统仿真[J].继电器,2001,29(11):41 -43.
[7] 邱鑫,黄文新,杨建飞,等.一种基于转矩角的永磁同步电机直接转矩控制[J].电工技术学报,2013,28(3):56 -62.
[8] 韩建群,郑萍.一种用于电动汽车的永磁同步电机直接转矩控制的简化方法[J].电工技术学报,2009,24(1):76 -80.
[9] KRAUSE O a S P C. Analysis of electric machinery[M]. IEEE Press,1995.
[10] LEE J S.Deadbeat-direct torque and flux control of interior permanent magnet synchronous machines with discrete time stator current and stator flux linkage observer[J].IEEE Transactions on Industry Applications,2011,47(4):1749 -1758.
猜你喜欢
大电机技术(2022年5期)2022-11-17
电机与控制应用(2022年4期)2022-06-27
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
弹箭与制导学报(2018年1期)2018-11-13
电测与仪表(2016年10期)2016-04-12
