
FlexRay总线在线控转向系统中的应用研究
2015-03-11 08:16ResearchonApplicationoftheFlexRayBusinSteerbywireSystem
自动化仪表 2015年8期
Research on Application of the FlexRay Bus in Steer-by-wire System
王 闯
(许昌学院信息工程学院,河南 许昌 461000)
FlexRay总线在线控转向系统中的应用研究
Research on Application of the FlexRay Bus in Steer-by-wire System
王闯
(许昌学院信息工程学院,河南 许昌461000)
摘要:针对线控转向系统对车载网络的实时性、确定性和高可靠性通信的要求,设计了基于FlexRay总线的线控转向系统。FlexRay线控转向系统的研究分为方向盘力反馈路感和方向盘对前轮的控制这两个部分,重点研究了方向盘对前轮的控制部分。通过配置FlexRay网络参数和分配两个FlexRay节点的任务,对搭建的线控转向系统进行了在线监测。试验结果表明了FlexRay总线应用于线控转向系统的可靠性和安全性,适合作为线控转向系统通信网络的标准。
关键词:FlexRay线控转向时间触发协议光电编码器步进电机
Abstract:In accordance with the communication requirements of steer-by-wire (SBW) system on on-vehicle network, e.g., the real time performance, certainty and high reliability, the SBW system based on FlexRay bus has been designed. The research on FlexRay-based SBW system is composed of two parts, i.e., the steering wheel force feedback road feel and the control for front wheel; here, the second part is researched emphatically. By configuring FlexRay network parameters and allocating tasks for two FlexRay nodes, online monitoring of the SBW system established is conducted. The experimental results show the reliability and security of applying FlexRay bus in SBW system, and FlexRay is suitable to serve as the standard of steer-by-wire system communication network.
Keywords:FlexRaySteer-by-wireTime-triggered protocolPhotoelectric encoderStepper motor
0引言
汽车未来的发展方向是电气化、网络化和智能化。这些发展趋势会促使目前转向系统中的机械和液压转向系统向电子转向系统发展,从而提出了线控转向(steer-by-wire,SBW)系统[1]。与传统的机械转向系统相比,线控转向系统在信号传输上需要更高的安全性和可靠性。
FlexRay作为下一代车载网络的标准之一,它的双通道架构提供了足够的安全冗余来支持安全相关系统的可靠要求。FlexRay总线每个通道的数据传输速度能达到10 Mbit/s。通过和CAN、LIN等网络结合在一起工作,FlexRay不仅能减少使用并行CAN网络通信来解决带宽瓶颈问题,还能降低设计成本[2]。
虽然针对FlexRay通信机制的理论研究已经开展多年,但是对其应用研究却刚刚开始。本文在介绍FlexRay总线协议规范的基础上,提出了一种建立在FlexRay总线基础上的线控转向系统,将FlexRay总线作为线控转向系统的通信网络。FlexRay线控转向系统的研究分为方向盘力反馈路感和方向盘对前轮的控制这两个部分,本文重点研究了方向盘对前轮的控制部分。
本文结构如下:首先简要介绍了FlexRay通信协议特点;然后描述了测量方向盘转角使用的工具和方法,同时配置了FlexRay的通信参数;最后以实验室搭建的线控转向系统为例,测试了这种基于FlexRay的线控转向系统的性能。
1FlexRay概述
一个FlexRay帧由3部分组成,分别是头部段、负载段和尾部段,如图1所示。
FlexRay网络上的通信节点在发送一个报文帧时先发送头部段,再发送负载段,最后是尾部段。
在FlexRay协议中,其媒体访问控制方式是基于循环的通信周期。在一个通信周期内,FlexRay提供两种媒体访问方式:静态段的时分多路访问(time division multiple access,TDMA)方式和动态段的基于最小时隙的柔性时分多路(flexible time division multiple access,FTDMA)访问方式[3]。每一个通信周期包括静态段、动态段、符号窗口和网络空闲时间。
无论在通信周期静态段中是否有报文通过总线发送数据,静态段的时隙个数都是定值,并且每个静态时隙的长度值相同。在通信开始前,每一个时隙都应该分配给节点,并且一个或多个时隙可以安排在一个节点,但是这个节点只允许发送数据而不能接收数据。通信周期的静态段是时间触发的,每一个节点提前知道报文的发送时间和报文的接收时间。整个静态段的通信是确定的和有保证的,而动态段的长度可变,它专门用来给非关键性和随机发生的报文使用。
与CAN总线相比,FlexRay总线的劣势是必须要有启动程序,以及在运行时不可重新配置[4]。基于TDMA的通信方案要求在一个簇中的所有参与通信的节点都要同步和校正。所有节点都要初始化同步为容错和分布式启动模式。这个初始化启动过程叫做冷启动。当一个簇中的节点个数少于3个时,那么每个节点都将是一个冷启动节点,每个启动帧也将是一个同步帧。因此,每一个冷启动节点同时也是一个同步节点。
更多关于FlexRay总线的信息,可以在FlexRay协议规范里面查找[5]。
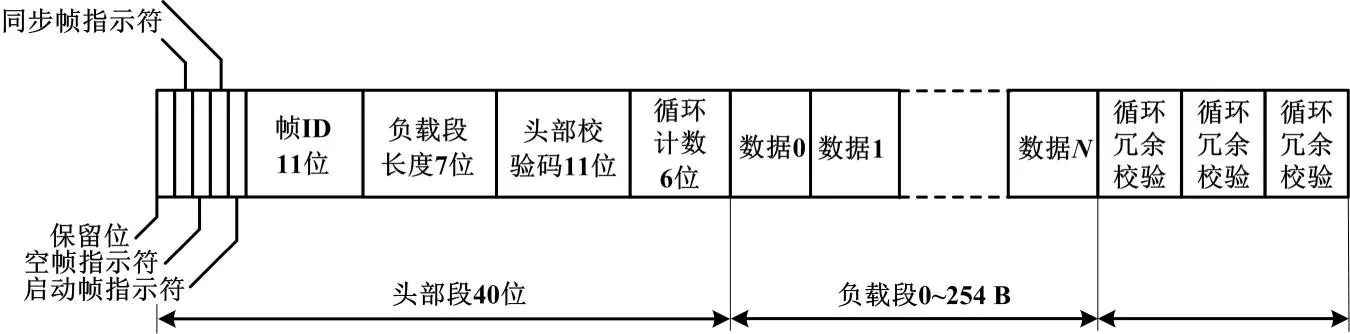
图1 FlexRay帧格式
2线控转向系统转向角的测量
2.1 线控转向系统架构
本文中设计的线控转向系统由转向盘节点(节点1)、前轮执行机构节点(节点2)和FlexRay通信网络组成。文献[6]中已经阐述了基于FlexRay的线控转向系统的工作原理。从中可以看出线控转向系统是一个非常复杂的系统。因此,本文只研究测量方向盘转角信号,并通过FlexRay网络传输方向盘转角信号,然后实时评估FlexRay的传输,通过FreeMASTER工具监测接收到的转角信号。图2是一个简易的线控转向系统原理图。由图2可以看出,只研究如何检测转向盘模块的转向角和如何通过FlexRay通信网络将转向角信号从节点1传输至节点2。

图2 线控转向系统
2.2 硬件组成
用于测量方向盘转角和方向的设备是增量式光电编码器(ISC3806),使用的光电编码器有3个输出信号:A相、B相和Z相。每旋转一圈,A相和B相将输出360个方波脉冲信号。编码器用来跟踪运动并且可以决定位置和速率。编码器连接在转向盘的末端,它根据光电转换原理能够将方向盘转角信号转换为数字脉冲信号。
系统使用正交输出的A相输出和B相输出,因为它们之间的相位差为90°。当顺时针旋转编码器时,A相超前B相90°;当逆时针旋转编码器时,B相超前A相90°。根据这个原理,就可以判断方向盘的转角方向。
为了测量顺时针旋转方向盘和逆时针旋转方向盘时的脉冲个数,使用参考文献[7]中设计的鉴相电路。经过鉴相电路的处理,输出的脉冲信号在同一时间只能有一个输出信号改变。鉴相电路的原理图如图3所示。
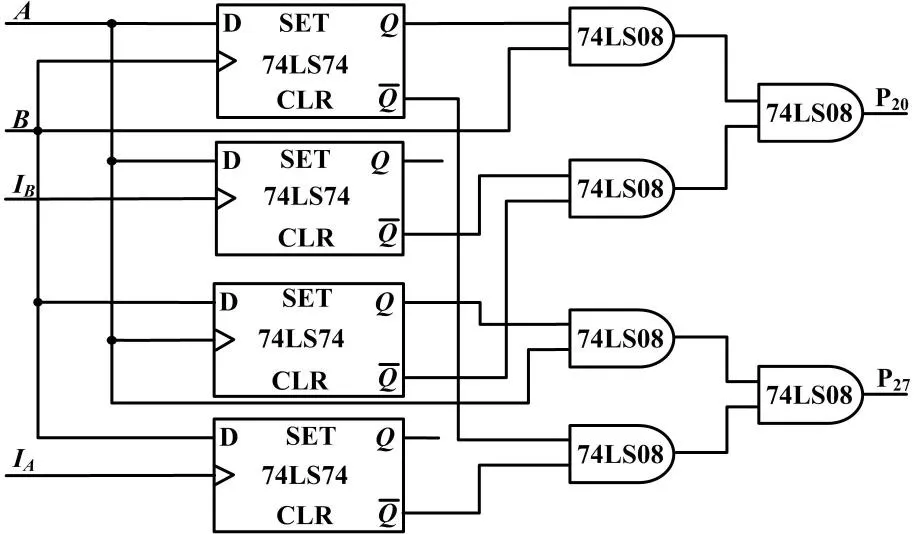
图3 鉴相电路原理图
鉴相电路由4个D触发器和6个与门组成,并且有4个输入信号,分别是A、B、IA和IB。其中A和B是光电编码器的输出信号,IA和IB是A相和B相的反向信号。
经过鉴相电路处理后,当顺时针旋转方向盘时,只有P20口输出脉冲信号,P27口输出低电平;当逆时针旋转方向盘时,只有P27口输出脉冲信号,P20口输出低电平信号。鉴相电路仿真结果图如图4所示。从图4可以看出,当逆时针旋转方向盘时,只有P27口输出信号,因此这个鉴相电路符合设计要求。

图4 鉴相电路仿真图
MC9S12XF512是Freescale公司生产的、内嵌FlexRay模块的单片机[8]。利用MCU上集成的两个16位脉冲累加器PACA和PACB,就可以计算接收到的脉冲个数,即方向盘的转向角度。当顺时针旋转方向盘时,脉冲累加器PACB的计数寄存器PACN10的脉冲个数增加。同理,当逆时针旋转方向盘时,脉冲累加器PACA的计数寄存器PACN32的脉冲个数也将增加。
节点1计算每个周期中检测到的方向盘转角脉冲信号个数。tx_data_1[0]存储方向盘顺时针旋转时存储的脉冲个数,tx_data_1[1]存储方向盘逆时针旋转时存储的脉冲个数。
2.3 FlexRay通信参数配置
在FlexRay网络能够正常通信前,需要正确配置FlexRay的参数。共有两种不同的参数类型需要配置:网络参数和节点参数[9]。配置好的网络参数如表1所示,它与FlexRay网络相关;节点参数和FlexRay网络中的某个节点有关。

表1 FlexRay网络参数配置
根据FlexRay协议,如果在一个FlexRay簇中的节点个数少于3个,那么每个节点都将是一个冷启动节点,每一个启动帧都将是一个同步帧。因此,每一个冷启动节点都将是一个同步节点[10]。在本文中,节点1和节点2都必须配置为冷启动节点并且在启动过程中发送冷启动帧。在时隙1中节点1发送冷启动帧,在时隙4中节点2发送冷启动帧。
同时在时隙1中,节点1通过FlexRay网络发送存放在数组tx_data_1[16]中的方向盘转角信号,节点2接收方向盘转角信号并把它存放在rx_data_1[16]数组中。两个节点的时隙分配如表2所示。

表2 FlexRay网络时隙分配
3试验测试平台
与CAN节点类似,一个FlexRay节点由MCU、FlexRay通信控制器、总线监视器(可选器件)和总线驱动器组成。在本试验中,使用Freescale半导体公司的S12XF开发套装。这个开发套装包含两个EVB9S12XF512E开发板,每一个开发板上都有一个MC9S12XF512芯片。FlexRay通信控制器是片上集成的,总线驱动使用的是NXP公司生产的TJA1080芯片。
节点2通过BDM Multilink仿真器连接计算机,通过FreeMaster仿真工具监视每个周期接收到的脉冲个数。
4试验结果和分析
当两个节点成功启动后,FlexRay将开始通信。节点1在时隙1中通过FlexRay通道A和B发送方向盘转角信号,节点2在每个周期的时隙1中接收报文信息,并把方向盘顺时针转角信号存放在rx_data_1[0]中,方向盘逆时针转角信号存放在rx_data_1[1]中。
图5和图6所示为通过FreeMaster工具观测到的方向盘顺时针和逆时针转角信号。
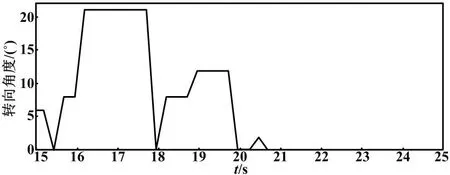
图5 方向盘顺时针转角信号

图6 方向盘逆时针转角信号
当整个系统开始工作时,首先顺时针旋动方向盘,20 s之后逆时针转动方向盘。从图5和图6可以看出,鉴相电路工作正常并能够区分方向盘的顺时针旋转和逆时针旋转。
本试验中,当断开FlexRay的通道B时,并不影响另一个通道正确传输数据。然而如果使用CAN进行数据的传输时只能有一个通道,当断开时CAN将不能正常工作。试验结果表明,整个FlexRay网络设计完好并且系统工作正常。
5结束语
FlexRay是车载通信网络即将到来的标准,它的主要应用领域是X-By-Wire技术。本文选用线控转向(SBN)系统作为它的应用对象。FlexRay的时间触发工作特性和双通道传输特性使得它在安全关键性报文信息的传输上要优于CAN总线,试验结果表明FlexRay通信网络安全可靠。
FlexRay总线具有以下特性:①确定性通信,节点1在预定好的时隙1中发送报文信息,节点2同样
也在时隙1中接收报文,这表明基于FlexRay的通信是时间触发的;②可靠性和安全性,断开任何一路传输通道并不影响整个系统的正常工作,这将在硬件冗余上节省成本。
参考文献
[1] 唐莹.汽车前轮线控转向系统研究[D].上海:上海理工大学, 2009.
[2] Freescale Semiconductor.FlexRay communication system[EB/OL].[2014-09-12].http://www.freescale.com/webapp/sps/site/homepage.jsp?code=FLEXRAY.
[3] 顾嫣.FlexRay线控转向系统的实时性与容错性研究[D].上海:上海理工大学,2010.
[4] Waras D.Steer-by-wire system based on FlexRay protocol[C]∥2009 Applied Electronics International Conference,2009:269-272.
[5] FlexRay Consortium.FlexRay protocol specification V2.1 Rev.A[S].http://www.flexray.com,2005.
[6] Duan Jianmin,Zhu Liang,Yu Yongchuan.Research on FlexRay communication of steering-by-wire system[C]∥2009 IEEE Intelligent Vehicles Symposium,2009:824-828.
[7] 孙祥明,齐明侠,沈蓉.编码器换向误码输出原因探讨及鉴相电路改进[J].石油大学学报,2005,29(4):91-94.
[8] Freescale Semiconductor.MC9S12XF512 Reference Manual[EB/OL].[2010-10-15].[2014-09-12].http://www.win.tue.nl/~mholende/automotive/MC9S12XF512RMV1.pdf.
[9] 牛志刚,肖昆,王建林,等.FlexRay总线在电力系统继电保护装置中的应用[J].电力系统保护与控制,2010,38(16):73-77.
[10]Cheng Anyu,Pang Rui,Zhao Shuang,et al.Application of the in-vehicle FlexRay network on steer-by-wire system[C]∥International Coference on Mechanic Automatic and Control Engineering,Wuhan,2010:5426-5431.
中图分类号:TH85;TP393
文献标志码:A
DOI:10.16086/j.cnki.issn1000-0380.201508010
修改稿收到日期:2014-12-16。
作者王闯(1983-),男,2011年毕业于上海理工大学检测技术与自动化装置专业,获硕士学位,助教;主要从事车载网络通信、现场总线技术的研究。
猜你喜欢
汽车之友(2021年23期)2021-12-24
今日农业(2020年16期)2020-12-14
舰船电子对抗(2020年2期)2020-06-23
红土地(2019年10期)2019-10-30
经济研究导刊(2018年26期)2018-11-14
铁道通信信号(2018年9期)2018-11-10
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
舰船电子对抗(2016年3期)2016-12-13
汽车零部件(2014年5期)2014-11-11
