
登陆编队前置直升机防潜警戒配置方法及其仿真
2015-03-11 03:24汪志强谢国新
舰船电子工程 2015年7期
汪志强 谢国新 郭 磊
(海军陆战学院 广州 510430)
登陆编队前置直升机防潜警戒配置方法及其仿真
汪志强 谢国新 郭 磊
(海军陆战学院 广州 510430)
根据登陆编队对潜防御的要求,分析了登陆编队前置直升机对潜防御警戒幕配置方法,提出了前置直升机警戒幕的近界和远界;构建了直升机警戒幕防敌潜艇突破数学模型,并在此基础上,实现了直升机警戒幕防敌潜艇突破仿真系统。通过仿真实验,对直升机警戒幕对潜防御效率进行了详细分析,为直升机伴随护航反潜的作战使用提供了理论依据。
登陆编队; 直升机警戒幕; 配置方法; 仿真
Class Number U674.76
1 引言
在登陆作战中,对潜防御是登陆编队防御的一项重要内容。随着潜艇装备技术的发展,现代潜艇航速更快,隐身性能更好,续航能力更强、水下航行的时间更长,武器装备的攻击能力也不断增强,加上难以预测和复杂多变的海洋环境,使得对潜防御变得更加困难。由于潜艇所具有的强大的突击能力以及其突出的牵制和威慑作用,在登陆作战中,如忽视对其防御,必将对登陆编队造成致命威胁[1~2]。本文根据登陆编队对潜防御的要求,对登陆编队近程前置直升机警戒幕的配置方法进行了分析,并对直升机警戒幕防敌潜艇突破概率进行了仿真实验。
2 前置直升机警戒幕配置方法
图1 登陆编队直接警戒幕配置示意图
根据文献[3~4],为保护登陆输送舰艇安全,直接警戒舰艇通常可根据敌潜艇鱼雷的极限射距圆进行配置(图1),形成直接警戒幕。其中JB为登陆输送队中心位置,O点为敌鱼雷的极限射距圆圆心,r为登陆输送队外切圆半径,SYX为敌鱼雷的有效射程,HB为登陆编队航向。
舰载反潜直升机通常可使用吊放声纳建立对潜警戒巡逻线,携带吊放声纳的直升机通常在编队的前方、侧翼实施双机搜索,其中前置巡逻警戒线的直升机配置在编队前方一定距离LBZ上,增大编队对潜防御的纵深和警戒搜索效率,同时可对直接警戒舰艇形成一定的保护,以防御从编队前方突破的敌潜艇对警戒舰艇的攻击[5~6]。因此巡逻线近界LBZ1应使警戒舰艇可置于直升机保护之下,其配置位置如图2所示,其中O2点为敌潜艇鱼雷对警戒舰艇极限射距圆的圆心;当需要较大防御纵深或需要直升机在对潜警戒搜索的同时为编队提供一定的防空警戒时,为保证对输送舰艇群的保护,远界LBZ2应保证直升机警戒巡逻线边缘不出现缺口(图3)。
图2 直升机前置配置“己”字形点水搜索示意图一

图3 直升机前置配置“己”字形点水搜索示意图二
3 数学模型
在我登陆编队配置直升机警戒幕时,敌潜艇成功突破警戒幕的概率与警戒幕的配置、巡逻线长度、搜索方法等多种因素有关。在此以图1为例,为保持与登陆编队同步,直升机常用的搜索方式有两列、三列曲折机动搜索[7~8]。当我前置直升机警戒幕对潜艇鱼雷可攻击区域形成完全覆盖警戒时,敌潜艇为对我登陆编队攻击,如绕开我直升机警戒幕则无法进入鱼雷可攻区域对我编队实施攻击,因此敌潜艇必须突破我直升机警戒幕才能对我登陆编队构成威胁,在此对直升机警戒幕发现敌潜艇的概率进行分析。设两架直升机在登陆编队前方配置,采用三列“己”形曲折机动(如图2所示)。按图4所示,以编队航向为X轴正方向,编队左正横方向为Y轴正方向,吊放声纳搜索范围外切框的左下角为原点,建立起平面直角坐标系。敌潜艇在我直升机巡逻线以外时,对我直升机搜索没有影响,只有当敌潜艇进入到直升机巡逻线边缘时,再继续运动才有可能被我直升机发现[9]。因此设t=0时刻,敌潜艇正处于我直升机巡逻线边缘拟进行突破,L为前置直升机警戒巡逻线的长度,潜艇进行突破时的突破点的坐标为(Xd0,Yd0),Yd0在(0,L)范围内服从均匀分布,则:
Xd=2dzs
(1)
Yd=ξ1L
(2)
式中,dzs为直升机吊放声纳有效作用距离;ξ1为服从(0,1)均匀分布的随机数。
θ角在(0,π)服从均匀分布,则:
θ=ξ2π
(3)
式中,ξ2为服从(0,1)均匀分布的随机数。
图4 敌潜艇突破直升机警戒幕示意图
假设潜艇不改变运动方向,则其运动方程为
(4)
设两架直升机坐标分别为(Xz1,Yz1),(Xz2,Yz2),t=0时刻,显然Xz1=Xz2=dzs,Yz1在(3dz+dzs,5dz+dzs)内服从均匀分布,则:
Yz1=3dz+dzs+ξ32dz
(5)
式中,dz为直升机相邻两个探测点的距离;ξ3为服从(0,1)均匀分布的随机数。
则:
Yz2=2dz+dzs-ξ32dz
(6)
直升机一个探测周期的时间为
TZ=dz/vz+tf+tj+ts
(7)
式中,tf为直升机放下吊放声纳所需的时间;tj为直升机使用声纳听测时间;ts为直升机收起吊放声纳所需的时间;vz为直升机转移探测点时的飞行速度。
在图4中,直升机处于探测点进行听测时,设直升机1、2与潜艇的距离分别为D1、D2,当D1>dzs且D2>dzs,潜艇没有进入吊放声纳探测范围,潜艇没有被发现。当D1≤dzs或者D2≤dzs,潜艇进入直升机吊放声纳探测范围,潜艇可能被发现。由于海洋环境复杂,存在大量不确定因素,直升机不一定能发现进入到吊放声纳探测范围的敌潜艇。目前国内外常用式(8)来描述声纳发现潜艇的概率[10]。
(8)
式中,D为直升机吊放声纳进行探测时,直升机与敌潜艇的距离。
4 仿真实验
4.1 仿真系统
敌潜艇突破直升机仿真系统基于Microsoft Visual C++6.0的开发环境下而实现,仿真程序对我舰载直升机警戒幕防敌潜艇突破进行仿真(见图3)。仿真程序流程如图5所示,n为当前仿真次数,m为发现敌潜艇次数,tz为一次声纳发射信号到接收信号的时间,tj为听测时间,tc为一个探测点的探测总时间,tf为放吊放声纳时间,D1、D2分别为直升机1、2到敌潜艇的距离,仿真次数N默认设置为10000次,系统主界面上主要包括对相关数据和初始态势的设置(如图6所示)。
为降低仿真难度,提高仿真效率,在本仿真过程中作如下假设:
1) 敌潜艇的运动是连续的,在其突破我直升机警戒幕过程中,假定其不改变航向、航速。
2) 在敌潜艇突破我直升机警戒幕过程中,通过计算直升机在探测点探测过程中每一时刻与敌潜艇的距离Dqz来判断探测效果。当Dqz大于直升机吊放声纳作用距离dzs时,认为敌潜艇没有进入到吊放声纳的有效探测范围,不会被发现;当Dqz≤dzs时,敌潜艇进入到吊放声纳的有效探测范围,有可能被发现。由于能否发现敌潜艇还取决于声纳误差、水文气象条件、人员训练水平等多种因素,在此忽略这些因素的影响,根据式(8)计算潜艇进入吊放声纳探测范围被发现的概率,再结合蒙特卡罗法判定潜艇是否被发现。
图5 仿真程序框图
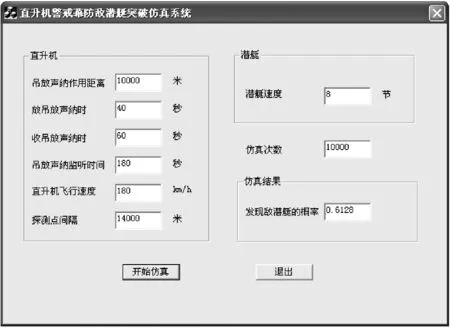
图6 直升机警戒幕防敌潜艇突破仿真系统主界面
4.2 仿真实验方案
1) 方案一:相邻探测点间距对直升机警戒幕警戒效果的影响
设定仿真实验参数:
(1)直升机的转移速度为180km/h,在一个探测周期内,收吊放声纳的时间为60s,放吊放声纳的时间为40s,吊放声纳监听时间为180s,潜艇速度为8节。
(2)直升机吊放声纳的作用距离dzs分别为4km,8km,12km。
(3)相邻探测点间距D分别为:1.1dzs,1.2dzs,1.3dzs,1.4dzs,1.5dzs,1.6dzs,1.7dzs,1.8dzs,1.9dzs,2.0dzs。
2) 方案二:潜艇速度对直升机警戒幕警戒效果的影响
设定仿真实验参数:
(1)吊放声纳有效探测距离为8km,相邻探测点间距为1.4dzs,直升机的转移速度VZ分别为120km/h,160km/h,200km/h)。
(2)在一个探测周期内,收吊放声纳的时间为60s,放吊放声纳的时间为40s,声纳监听时间为120s。
(3)潜艇速度VD分别为6,7,8,9,10,11,12,13(节)。
4.3 结果分析
1) 仿真实验方案一实验数据如表1所示。
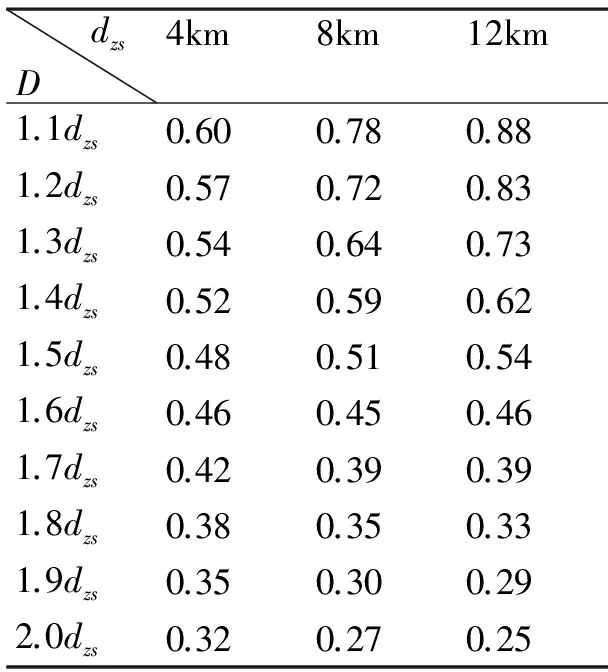
表1 实验数据一
直升机相邻探测点距离对发现敌潜艇概率的影响如图7所示。
从图7中可以看出,直升机发现敌潜艇的概率随着相邻探测点距离的加大而下降,且下降的幅度较大。由于相邻探测点距离的加大,直升机点水搜索的时间连续性差,对警戒区域重复探测的范围较小,使得对敌潜艇发现的概率下降。

图7 相邻探测点距离与发现敌潜艇概率关系图
当相邻探测点距离在1.1倍到约1.6倍声纳作用距离范围内变化时,发现敌潜艇的概率随着吊放声纳作用距离的增加而增加;在相邻探测点的距离约为1.6倍的声纳作用距离时,不同的声纳作用距离对发现敌潜艇的概率趋于相等;当相邻探测点距离在1.6倍到2倍声纳作用距离范围内变化时发现敌潜艇的概率随着声纳作用距离的增加而减小。分析其原因为当相邻探测点距离在1.1倍到约1.6倍声纳作用距离范围内变化时,声纳作用距离越大,则每次探测所能探测的范围越大,发现敌潜艇的概率越高;当相邻探测点距离在1.6倍到2倍声纳作用距离范围内变化时,声纳的作用距离越短,探测点间距小,直升机转移探测点的时间短,则两次探测的时间间隔短,因而发现敌潜艇的概率高。
可见,为提高发现突破的敌潜艇的概率,应采取较小的相邻探测点间距,但间距过小的话,直升机与编队同步较难,同时会影响直升机警戒幕的长度,可能造成直升机警戒幕无法对敌鱼雷可攻区域形成完整的警戒。因此,应在保证直升机警戒幕能满足对敌鱼雷可攻区域形成完整的警戒,适当减小相邻探测点的距离,以提高发现突破的敌潜艇的概率。
2) 仿真实验方案二实验数据如表2所示。

表2 实验数据二
敌潜艇突破速度对发现敌潜艇概率的影响如图8所示。
由图8可以看出,发现敌潜艇概率随潜艇突破速度的增加而降低,当速度大于一定值时,发现敌潜艇的概率逐渐趋于稳定。潜艇速度的增加,使潜艇能以较快的速度通过直升机警戒幕,减少了通过警戒幕的时间,从而减小了被发现的可能。同时从图8中可以看出,发现敌潜艇的概率随直升机转移速度的增加而增加,直升机速度的增加,使直升机相连探测点间隔时间减少,从而提高了发现敌潜艇的概率。因此,为提高发现敌潜艇的概率,直升机应提高转移速度。由于直升机转移速度的提高会导致直升机推进速度大于编队推进速度,为使直升机能与编队保持同步,可通过减小相邻探测点距离及延长吊放时间来调整,这样既满足编队同步推进的要求,又能进一步提高发现敌潜艇的概率。
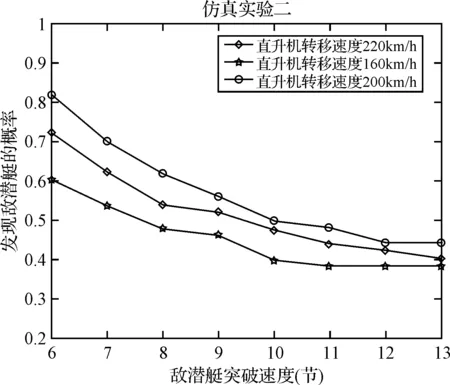
图8 敌潜艇突破速度与发现敌潜艇概率关系图
[1] Timothy N. ketter. Anti-Submarine Warfare in the 21st Century[C]//Navy War College, May 20,2004.
[2] Mrityunjoy Mazumdar. Global Conventional Submarine Programmes[J]. Naval Forces,2000,5.
[3] 吴晓海,沈培华,樊洪港.舰载直升机反潜区域探讨[J].海军航空工程学院学报,2009,24(2):229-232.
[4] 赵正业.潜艇火控原理[M].北京:国防工业出版社,2003:237-239.
[5] 郭辉,钱学东,刘启军.直升机吊放声纳搜潜机动建模仿真[J].指挥控制与仿真,2009,31(1):87-89.
[6] 吴晓海,沈培华,樊洪港.舰载直升机反潜区域探讨[J].海军航空工程学院学报,2009,24(2):229-232.
[7] 丛红日,肖明强,陈邓安.直升机反潜巡逻线与编队之间同步问题研究[J].舰船电子工程,2011,31(8):8-10.
[8] 朴成日.航渡中反潜直升机的配置[J].舰船科学技术,2012,34(3):118-121.
[9] 丛红日,沈培志,王伟.直升机侧翼法伴随护航反潜作战使用方法及其仿真[J].舰船科学技术,2011,33(3):115-119.
[10] 刘剑.单舰反潜CGF建模研究[D].青岛:海军潜艇学院,2006:38-39.
Allocation Method and Simulation of Prepositive Helicopter Anti-submarine Alert Line of Landing Operation
WANG Zhiqiang XIE Guoxin GUO Lei
(Naval Marine Academy, Guangzhou 510430)
Accodring to the requirement of anti-submarine defence for landing operation, the allocation method of prepositive helicopters anti-submarine is analysed. Near filed and far field of prepositive helicopers’s allocation method are put forward. The mathematical model of helicopters alert line prevent submarine through is set up. On this base, the simulation system of helicopters alert line prevent submarine through is developed. Simulation result is presented and analysed in detail. These result can offer theoretic foundation for the helicopter flanking accompanying anti-submarine operating application.
landing operation, helicopters anti-submarine, allocation method, simulation
2015年1月2日,
2015年2月27日 作者简介:汪志强,男,硕士,研究方向:战术建模与仿真。谢国新,男,教授,研究方向:海军兵种战术与作战模拟。郭磊,男,硕士,研究方向:海军战术学基础理论。
U674.76
10.3969/j.issn1672-9730.2015.07.010
猜你喜欢
火力与指挥控制(2021年8期)2021-09-08
河北地质(2021年1期)2021-07-21
考试与评价·八年级版(2020年5期)2020-10-29
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2017年10期)2017-04-20
求学·理科版(2016年3期)2016-03-23
火控雷达技术(2016年2期)2016-02-06
