
虚实结合的机电设备控制仿真平台
2015-03-10 07:05丁金华李明颖王德权丁明亮刘贤达王魁一
实验技术与管理 2015年2期
丁金华, 李明颖, 王德权, 高 腾, 丁明亮, 刘贤达, 王魁一
(大连工业大学 机械工程与自动化学院, 辽宁 大连 116034)
虚实结合的机电设备控制仿真平台
丁金华, 李明颖, 王德权, 高 腾, 丁明亮, 刘贤达, 王魁一
(大连工业大学 机械工程与自动化学院, 辽宁 大连 116034)
机电设备控制仿真平台由上下位机构成,上位机触摸屏(或PC机)与下位机嵌入式系统采用RS485相连,基于MODBUS协议通信。上位机触摸屏(或PC机)上的虚拟机电设备检测控制端口通过下位机嵌入式系统的实际端子与学生实际设计的PLC或单片机控制系统上的IO口端子相连,构成了虚实结合的机电设备控制仿真平台。下位机嵌入式系统由一个主模块和多个级联副模块构成。上位机的虚拟机电设备采用可视化组态软件MCGS完成,下位机采用Keil C语言进行设计。举例说明了典型机电一体化产品XY数控工作台和压蜡机的虚拟设计。
虚拟仿真平台; 机电设备控制; 数控工作台; 压蜡机
机电设备的运行离不开控制系统。常用机电设备的控制系统有PLC控制系统[1]、嵌入式控制系统[2]、计算机控制系统[3]等。机电控制系统的教学涉及机械电子工程专业多门核心课程,例如“可编程序控制器原理及应用”、“单片机原理与接口技术”、“工业可视化监控系统及应用”、“微机原理与应用”、“传感器与测试技术”、“电气控制技术”、“机械制造工程基础”和“机电一体化系统设计”。通常购置机电设备需要较多资金,即使学校实验室已有一些典型机电设备,也因为数量不多,不能用作被控对象让每个学生进行控制系统调试。而完全通过软件仿真,虽然能让学生了解机电设备的工作过程,却很难让学生通过PLC或嵌入式系统的软件编程与调试得到锻炼。为此,构建了虚实结合的机电设备控制仿真平台[4],既可让学生了解机电设备的结构形式、工作原理和工作流程,又可以将PLC或嵌入式系统通过IO口与之相连,控制虚实结合的机电设备运行,达到与控制实际机电设备一样的效果[5-8]。
1 虚实结合机电设备控制仿真平台硬件设计
虚实结合的机电设备控制仿真平台硬件如图1所示。仿真硬件平台采用上下位机结构,下位机利用串行通信进行级联,将主模块、级联模块等多个主副控制器连接起来,以满足不同机电设备的IO口需要。
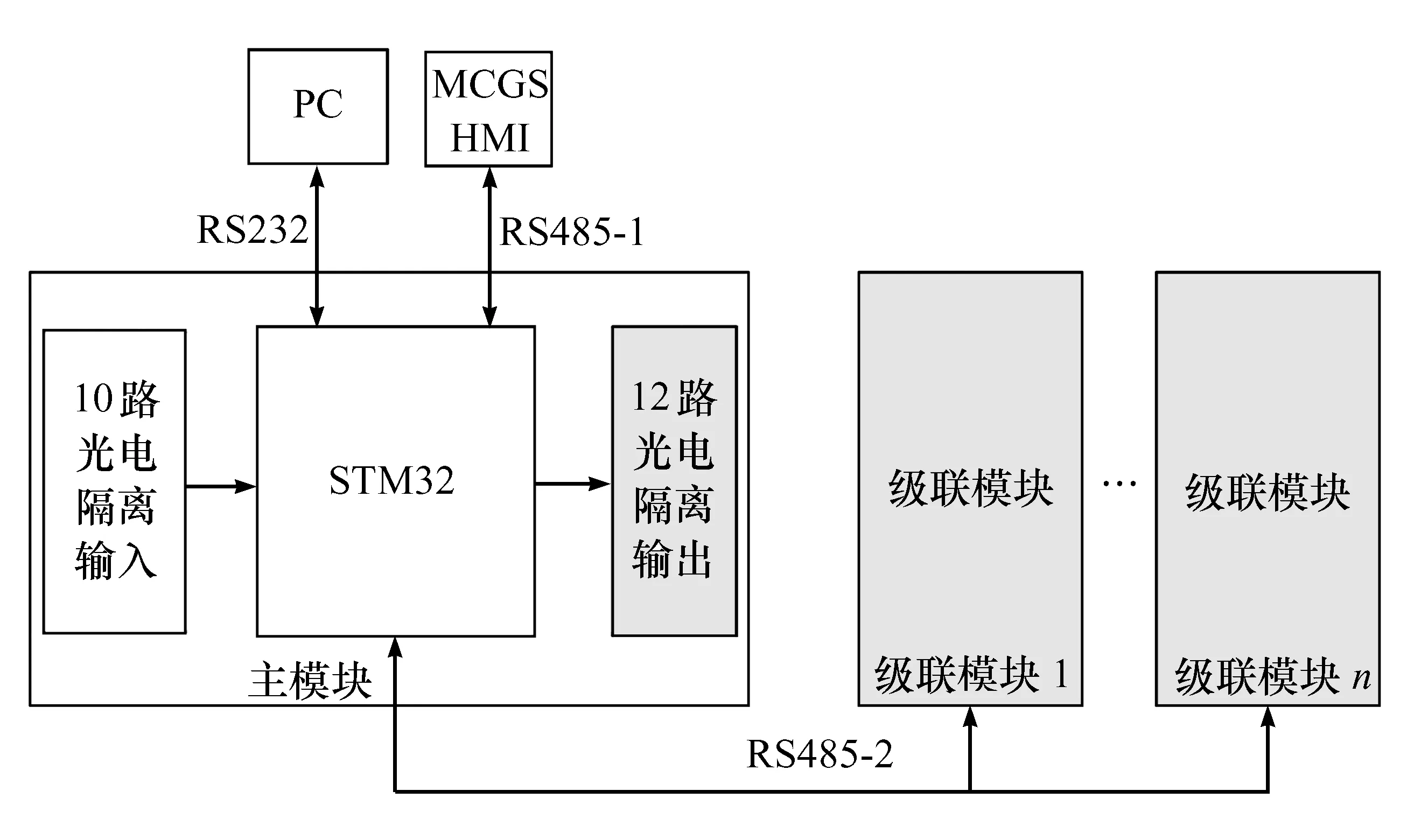
图1 虚实结合机电设备控制仿真平台硬件
上位机机电设备仿真界面实际是真实机电设备的虚拟影像,但可以与下位机通过RS485(或RS232)接口进行数据或命令通信。仿真界面上的每一个机电元件的电气接口都与下位机的输入输出端子相对应,因而可被其他系统检测与控制。
下位机负责将上位机的各机电元件、电气接口连接到真正的端子上,同时机电元件的通断状态(开关量)或电平(模拟量)也表现在端口处。这样,学生设计的控制系统可以通过实际的导线和端口与被控的上位机中的虚拟机电设备相连接。
1.1 上位机
上位机可以使用MCGS触摸屏或PC机,以满足不同用户的需要。MCGS触摸屏采用RS485接口与主控器相连,PC机采用RS232接口与主控器相连。上下位机利用MODBUS协议进行通信。
1.2 下位机
下位机主控芯片采用嵌入式微处理器STM32F103R8T6进行模块化设计。主模块含有12路IO隔离输出接口、10路IO隔离输入接口、1路RS232接PC机、1路RS485接触摸屏HMI、1路RS485用于级联控制器,以扩展IO口的数量或功能(见图1)。扩展数字IO口的级联模块可以用主模块来代替,扩展模拟IO口的级联模块选用模拟量模块。模拟量模块含有4路DC 4~20 mA输入通道和4路DC 4~20 mA输出通道。
开关量输入接口可连接光电传感器、霍尔元件传感器、行程开关、位置开关、按键按钮、编码器等数字输入量。
模拟量输入接口可连接温度传感器、位移传感器、压力传感器等模拟信号输入。模拟量输入接口设计为工业常用的DC 4~20 mA输入信号形式。
开关量输出接口可连接继电器、接触器、阀门、缸体、指示灯、步进电机或伺服电机控制信号等数字量输出信号。
模拟量输出接口可连接变频器控制信号、阀门位置等模拟量输出信号。模拟量输出接口设计为工业常用的DC 4~20 mA输出信号形式。
通信接口采用RS232和RS485两种硬件接口形式,可按照MODBUS通信协议进行通信,用于交换数据与命令。
2 虚实结合机电设备仿真平台软件设计
机电设备仿真平台软件设计同样包含上位机和下位机软件设计。
2.1 上位机机电设备仿真界面设计
上位机机电设备仿真界面采用工业组态软件MCGS来完成。利用MCGS的设备窗口完成上位机与下位机通信设置、数据和命令交换。在MCGS的用户窗口,采用图形对象、图元对象、图符对象实现机电设备的仿真界面设计,经变量连接,可以完成机电设备的仿真运行。在MCGS的实时数据库可以设置机电设备的变量;在运行策略里进行脚本程序的编写。
2.2 下位机嵌入式控制器软件设计
下位机采用Keil MDK C语言进行设计,主要实现上下位机的变量数据交换,从而在下位机嵌入式控制器的IO口端子通过高低电平(开关量和模拟量)表现其工作状态。具体包括2部分的内容。
(1) 通信模块。通信模块包括3部分:①与上位机触摸屏或PC机基于MODBUS通信协议的通信程序,所编写的通信程序能够完成MODBUS常用的功能命令,也可根据需要进行添加;②与级联的控制模块相连的通信程序(为了统一起见,也采用MODBUS协议完成控制板级联程序),主控制器为主,其他级联模块为从;③第2路RS485作为自由口,以备与其他通信协议的模块相连,例如可用作读取伺服驱动器内部寄存器。
(2) 数据交换模块。数据交换模块负责解释触摸屏或PC机上虚拟机电设备的命令和数据,与下位机控制的变量实现连接,然后将对应的输入输出数据表现在下位机控制器的IO端口上。
3 典型机电设备的虚拟设计
虚实结合的机电设备控制仿真平台可通过触摸屏或PC机的屏幕选取不同的虚拟机电设备作为控制对象。本文以典型的虚拟机电设备XY数控工作台和压蜡机为例来说明。
3.1 XY数控工作台
XY数控工作台是许多数控加工设备和电子加工设备的基本部件[9-10],数控车床的纵横进刀装置、激光加工设备、芯片封装与表面贴装设备、刻字机等都含有XY工作台。工作台的运动是直线运动单元在X向、Y向运动的合成运动。学生使用单片机编写插补程序,驱动X、Y两个步进电机完成相应动作,实现预定的运动轨迹。
每个步进电机至少需要2个接口控制步进电机的运转。若采用方向脉冲方式,则一个接口的高低电平表示正反转,另一个接口为旋转脉冲;若采用双脉冲方式,则一个接口的脉冲为正转,另一个接口的脉冲为反转。XY工作台的X向、Y向运动各需一个电机,共需4个控制IO口。虚拟XY数控工作台如图2所示。
在图2中,右上角为控制面板,右下角为工作台,右中为接口状态指示,其中X0.0为X向左移动脉冲信号、X0.1为X向右移动脉冲信号;X0.2为Y向上移动脉冲信号,X0.3为Y向下移动脉冲信号。左面为工作台面图,可根据步进电机的脉冲信号绘制插补运算的移动轨迹。
3.2 压蜡机
压蜡机用于熔模精密铸造的蜡模压制[11-12],铸造用蜡模广泛用于飞机空气涡轮发动机、医疗器械、潜艇构件、环保用具、通用机械、计算机以及汽车等零部件的精密铸造。压蜡机的工作是借助压蜡装置和模具,用液态或膏态的模料制造出所需要的蜡型。
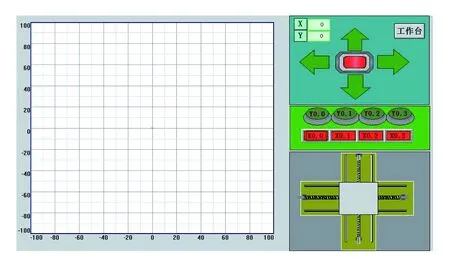
图2 虚拟XY数控工作台
图3为所设计的虚拟压蜡机界面。虚拟压蜡机可实现合模、开模、压蜡、补蜡、顶模和脱模剂喷射等工作过程,所涉及的传感器等变量如表1所示,阀门及缸体控制变量如表2所示。
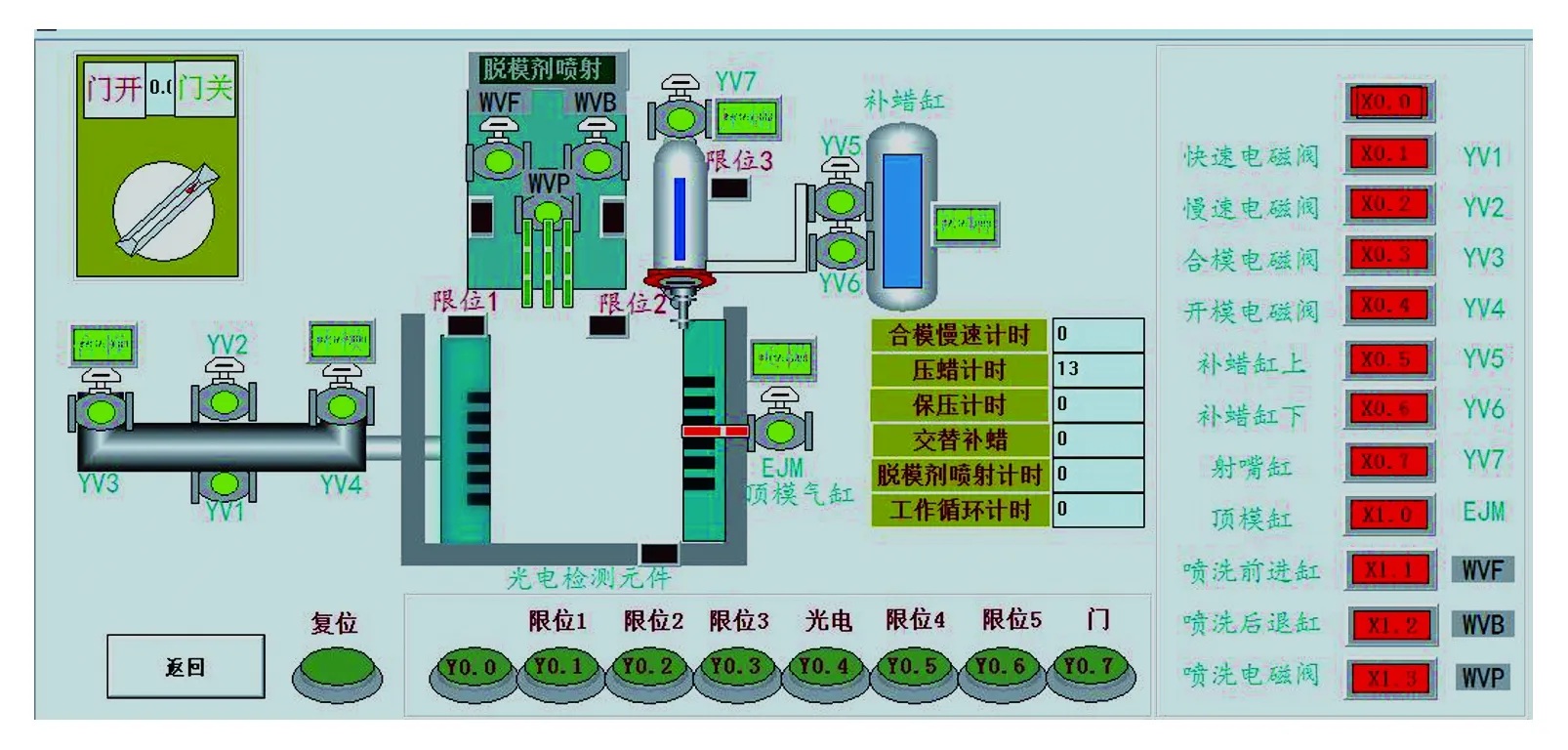
图3 虚拟压蜡机
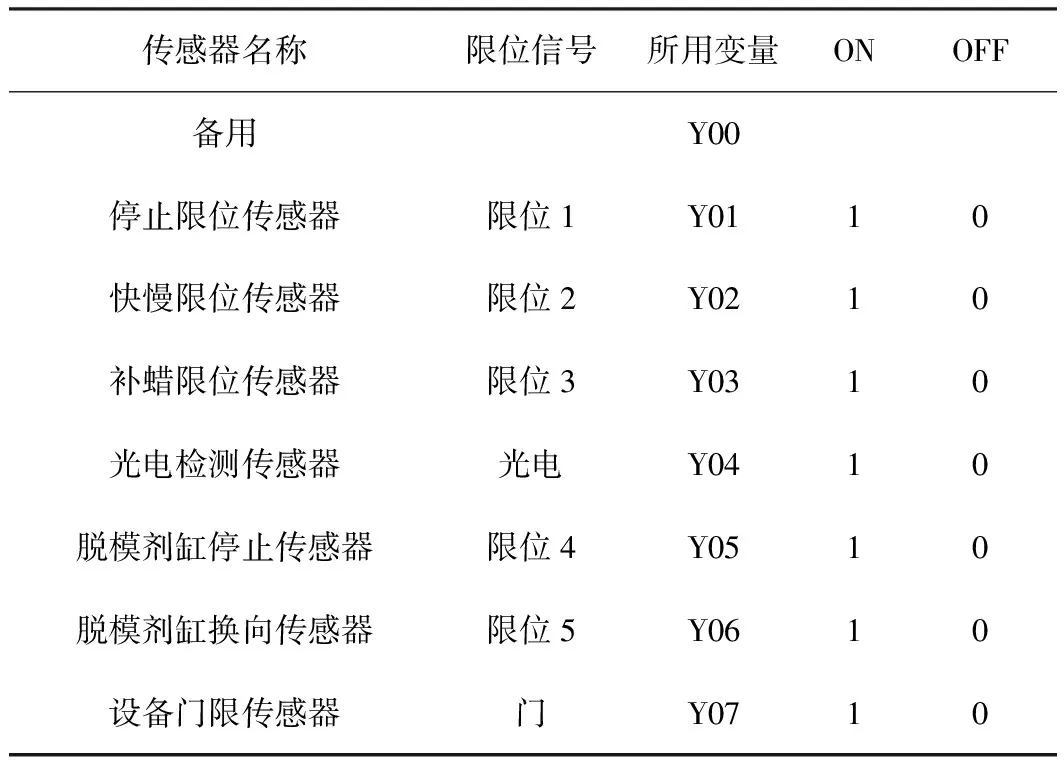
传感器名称限位信号所用变量ONOFF备用Y00停止限位传感器限位1Y0110快慢限位传感器限位2Y0210补蜡限位传感器限位3Y0310光电检测传感器光电Y0410脱模剂缸停止传感器限位4Y0510脱模剂缸换向传感器限位5Y0610设备门限传感器门Y0710
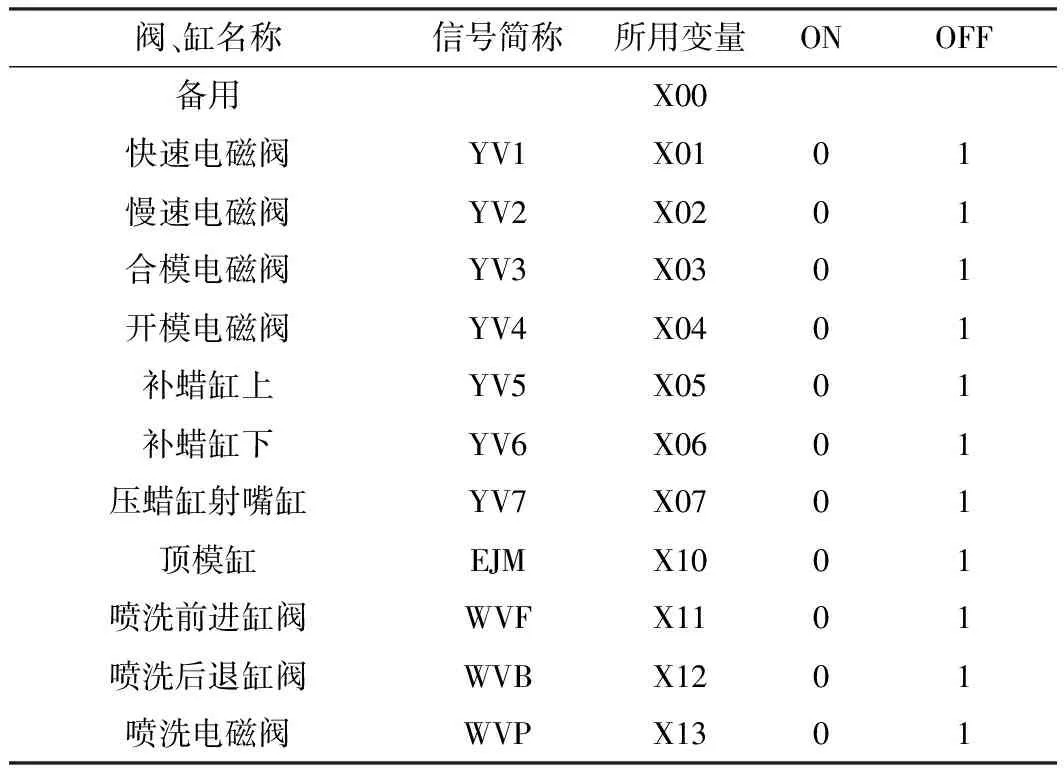
表2 虚拟机的阀门、缸体信号及变量
可以将虚拟压蜡机作为被控对象,采用PLC或嵌入式系统控制该虚拟压蜡机,进行编程控制与调试,共涉及19个输入输出口参数和6个定时器的控制系统编程。学生通过对压蜡机工作原理的学习和虚拟压蜡机的动作仿真、编程与调试,对所学过的单片机、PLC等课程的内容能融会贯通,强化了工程实践能力。
4 结束语
采用虚实结合的机电设备控制仿真平台构建虚拟实验室,可以做到学生人手一台仿真设备,使每位学生都能得到实际的操作训练。虚实结合的机电设备控制仿真平台克服了资源、时间、人力等条件的局限,将真实世界的机电设备移植到虚拟环境中。通过所设计的硬件系统将设备的IO口与实际的端子相连,采用PLC或嵌入式单片机进行控制设计,就不再仅仅是模拟,而是可以通过端子驱动虚拟的机电设备工作。虚拟实验设备还可以解决高校普遍存在的实验设备不足、型号落后、难以更新换代的困难,构建以学生为主体的实践教学方法,改善实验实训环境、优化教学过程、提高教学效果。
References)
[1] 于殿勇,刘兴义.基于PLC与触摸屏控制的搬运机械手的应用[J].制造业自动化,2009,31(8):121-123,127.
[2] 刘森,慕春棣,赵明国.基于ARM嵌入式系统的拟人机器人控制器的设计[J].清华大学学报:自然科学版,2008,48(4):482-485.
[3] 郑开陆.基于PC控制的大型机电设备柔性改进[J].机电一体化,2006,12(1);70-72.
[4] 顾邦军,罗陆锋.虚拟设备在实验教学中的案例分析研究[J].实验技术与管理,2011,28(2):111-112.
[5] 杨继森,杨奕,张静.虚拟实验平台在嵌入式系统教学改革中的应用[J].实验室研究与探索,2011,29(2):51-54.
[6] 江静,刘朝辉.《机电设备控制技术》虚拟实验平台建设的应用研究[J].华北科技学院学报,2013,10(4):73-77.
[7] 瞿曌,邓居祁,殷科生,等.虚拟实验室的功能与特点[J].长沙大学学报[J].2007,21 (5):73-77.
[8] 刘泽良.发挥虚拟实验室建设对实验教学的促进作用[J].实验技术与管理[J].2011,28(7):193-194.
[9] 齐畅,刘强,袁松梅.面向芯片封装的冗余驱动T型XY运动系统的研制[J].机床与液压,2008,36(12):1-3.
[10] 许丹,刘强.基于小波多分辨率分析的高性能XY工作台故障诊断[J].中国机械工程[J].2007,18(5):573-576.
[11] 熊学慧.熔模铸造用压蜡机研究现状及蜡模质量控制[J].哈尔滨工业大学学报,2008,40(11):1845-1848.
[12] 朱育权,高殿荣.熔模精密铸造液压压蜡机液压系统原理分析[J].液压与气动[J].2004(11):60-61.
Control simulation platform for mechanical and electrical equipment with virtuality and reality combination
Ding Jinhua, Li Mingying, Wang Dequan, Gao Teng, Ding Mingliang, Liu Xianda, Wang Kuiyi
(Department of Mechanical Engineering and Automation, Dalian Polytechnic University, Dalian 116034, China)
The control simulation platform for mechanical and electrical equipment with virtuality and reality combination consists of the master computer and the slave computer. The master computer with touch screen (or PC) and the slave computer with embedded system are connected by RS485, based on the MODBUS protocol communication. Virtual mechanical and electrical equipment testing and control ports on the master computer via the slave computer’s actual terminal could be connected to the terminal of PLC or single-chipped computer control system designed by students. The slave computer with embedded system consists of a main module and multiple cascaded modules. The virtual mechanical and electrical equipment on the master computer is programed by using visual configuration software MCGS, while the slave computers using Keil C. Virtual design on the typical mechatronics product of XY NC sliding table and the wax injection machine are illustrated.
virtual simulation platform; control of mechanical and electrical equipment; NC sliding table; mechatronics
2014- 06- 29
2012年度辽宁省普通高等教育本科教学改革研究立项项目 “多元构建实践环境培养机电学生就业创业能力”(811)资助;2013年辽宁省大学生创新创业竞赛项目(2013065) 资助
丁金华(1962—),男,山东威海,博士,教授,研究方向为机械电子工程.
E-mail:42012450@qq.com
TP391
A
1002-4956(2015)2- 0119- 04
猜你喜欢
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
科技与创新(2018年1期)2018-12-23
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年8期)2017-11-27
现代工业经济和信息化(2016年2期)2016-05-17
电子制作(2016年21期)2016-05-17
北京纪事(2016年5期)2016-05-07
邢台学院学报(2016年4期)2016-02-28
空间控制技术与应用(2015年2期)2015-06-05
