高分辨率遥感影像的建筑物轮廓信息提取方法
2015-03-10 01:49周绍光孙金彦凡莉向晶陈超
自然资源遥感 2015年3期
周绍光, 孙金彦, 凡莉, 向晶, 陈超
(1.河海大学地球科学与工程学院测绘科学与工程系,南京 210098;2.江苏省基础地理信息中心,南京 210013)
高分辨率遥感影像的建筑物轮廓信息提取方法
周绍光1, 孙金彦1, 凡莉1, 向晶1, 陈超2
(1.河海大学地球科学与工程学院测绘科学与工程系,南京 210098;2.江苏省基础地理信息中心,南京 210013)
针对高分辨率遥感影像分割方法提取的建筑物边缘不准确和不规则等问题,提出了一种新的边缘轮廓信息提取方法:首先,通过一维Gabor滤波器获取建筑物的角度纹理特征,并结合光谱特征构造待分割的特征矢量,在运用高斯混合模型(Gaussian mixture model,GMM)构造图的基础上,利用图割法(graph cuts)获取建筑物候选点,经数学形态学处理得到建筑物斑块;然后,根据Radon变换检测建筑物主方向,构建最小二乘匹配模板,并利用该模板在建立的轮廓缓冲区内精确地提取建筑物拐角点;最后,连接拐角点,完成了轮廓信息的提取。采用合成图像和高分辨率遥感影像提取建筑物轮廓信息的实验证明了该方法的可行性。
最小二乘模板匹配;高分辨率影像;建筑物轮廓;图割;影像分割
0 引言
随着经济的高速发展,社会对地理空间信息的需求越来越大。建筑物作为主要的地理空间研究对象之一,其轮廓信息在人类的生产与生活中发挥着重要的作用。目前,从高分辨率遥感影像中提取建筑物轮廓的方法根据所采用的特征及手段大致可以分为4种:基于分割技术、基于直线边缘检测、基于活动轮廓和基于角点检测与匹配。其中,基于高分辨率影像的分割技术一直是获取建筑物轮廓的重要手段[1-4];然而,由于噪声、光照及反射率等因素的影响,导致通过该方法获取的建筑物轮廓边缘与转角往往不清楚或不准确。基于直线边缘检测方法[5]在利用边缘检测算法得到边缘点后,利用Hough变换和Radon变换等方法获取直线边缘,再通过连接及其他手段得到建筑物轮廓;但此方法只有在地物之间遮蔽少、房屋独立和形体较为简单的情况下效果较好。基于活动轮廓的方法则利用Snake或水平集等方法,先划定或获取初始轮廓,然后在全图范围内利用原始影像等数据获取建筑物轮廓[6-8];但该方法易受噪声和阴影等因素的干扰,
从而导致提取的边缘轮廓不准确。基于角点检测和匹配的方法是依据影像上建筑物具有的较为明显的角点特征进行的检测和匹配[9];其缺点在于房屋的整体几何约束信息及直线边缘没有充分利用,相关约束条件不易引入,因某些角点被遮蔽或模糊等原因引起的角点匹配和提取的错误可能导致整个提取的失败。文献[10]将直线边缘检测方法及角点特征相结合,实现了航空影像立体像对中多直角平顶房屋的半自动提取;文献[11]将边缘线特征及角点特征相结合,实现了航空影像直角型房屋的半自动提取。尽管文献[10-11]介绍的2种方法提取效果均很好,但是应用起来都有限制,一是需要先检测出边缘点,二是Hough变换容易漏检短边缘,且文献[10]主要针对航空立体像对,而文献[11]有限的建筑物模型无法表达当今各种形状的建筑物。
鉴于此,本文提出了一种新方法,希望将影像分割技术与角点特征相结合,充分利用二者的优点,以实现建筑物轮廓信息的准确提取。
1 算法步骤
本文建筑物轮廓信息提取方法流程如图1所示。

图1 算法流程Fig.1 Flowchart of the proposed methodology
1.1 建筑物斑块的获取
由于高分辨率遥感影像中的建筑物细节信息丰富,且其光谱特征与周围环境尤其是道路的差异不大,而噪声(例如树木和建筑物本身的阴影及其他人造物)的大量存在,也加大了对建筑物信息的提取难度,因而仅依靠光谱特征难以有效地区分建筑物与其他地物,必须结合影像的其他特征才能取得令人满意的结果。
鉴于Gabor滤波器无论在分析数字图像局部区域的频率特征还是方向特征方面都具有非常优异的性能,所以本文采用一维Gabor滤波器获取高分辨遥感影像的角度纹理特征[12],同时结合光谱特征构造待分割的特征矢量。
利用高斯混合模型(Gaussian mixture model, GMM)和图割(graph cuts)相结合的方法[13],对上述获得的待分割特征矢量进行分割,得到建筑物候选点。本文采用的能量函数为

(1)
式中:等号右边第一项Dp(fp)为数据项(T链);第2项为边缘项(N链)。
利用GMM构造T链,Boykov[14]的方法构造N链,然后用图割解算出满足式(1)的图,此时图像被分为建筑物点和非建筑物点。最后利用数学形态学方法处理得到完整的建筑物斑块。
1.2 角点的检测及获取
1.2.1角点的检测
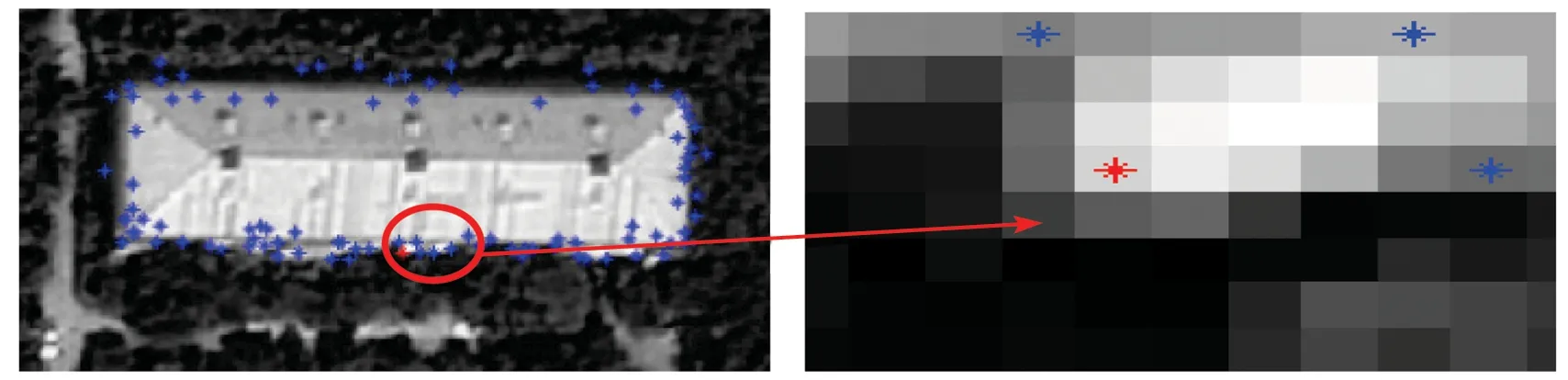
角点通常是指图像亮度变化剧烈的点或图像边缘曲线上曲率极大值的点。拐角点是建筑物存在的最直接证据之一,拐角点及其连线可以充分有效地表达建筑物。利用Harris算子检测所得的角点包含建筑物的拐角点,但也包含有大量的非拐角点,如图2所示。

图2 Harris 角点(蓝色点)Fig.2 Harris corner points(blue points)
1.2.2角点的获取
由于噪声等因素的影响,检测出的角点绝大部分都不是建筑物拐角点,同时真实拐角点的位置也可能不准确。为了从这些候选拐角点中识别出真正的拐角点,找到其真实位置,同时剔除非拐角点,本文引入了最小二乘模板匹配法。
1.2.2.1最小二乘模板匹配
最小二乘模板匹配(least square template matching,LSTM)最早是由Armin Gruen和Peggy Agouris提出的,用以实现半监督的边缘点追踪与获取[15]。此后,一些研究者利用最小二乘模板匹配与其他方法相结合实现道路中心线的亚像素级自动或半自动提取[16-18]。本文引入改进的最小二乘模板匹配,即

(2)
式中:△x和△y分别为模板上点(x,y)在X方向和Y方向移动的距离;φ为坐标系统中图像和模板之间的旋转角度;(X,Y)为对应的图像窗口的点。
设g(x,y)为图像窗口,f(x,y)为模板(大小为r像元×r像元),e(x,y)为噪声等因素影响产生的误差,将式(2)线性化,得到
f(x,y)-e(x,y)=g0(x,y)+gx△x+gy△y+[gy(xcosφ-ysinφ)-gx(xcosφ+ysinφ)]dφ。
(3)
式中:g0(x,y),gx,gy分别为模板所对应的图像窗口中像素(x,y)的光谱值和沿X,Y方向的梯度值。用矩阵形式表示则为

(4)

A=[gx,gy,gy(xcosφ-ysinφ)-gx(xcosφ+ysinφ)](r×r)×3;
(5)

(6)
解得改正值矩阵为

(7)
为了降低模板和噪声对实验结果的影响,本文首先利用Radon变换获取建筑物的2个主方向(α,α+90),在进行最小二乘模板匹配时,只进行平移,不进行旋转,即在实验过程中φ为固定值。本文变量的初始值设置为
(8)
模板g与局部图像f之间的相关系数ρ为

(9)
此外,为识别出真正的拐角点,在进行最小二乘模板匹配的过程中,还引入了一个新的判定条件——多方向差分法,即利用模板将局部图像划分为4个区域(B1,B2,B3,B4),如图3所示。
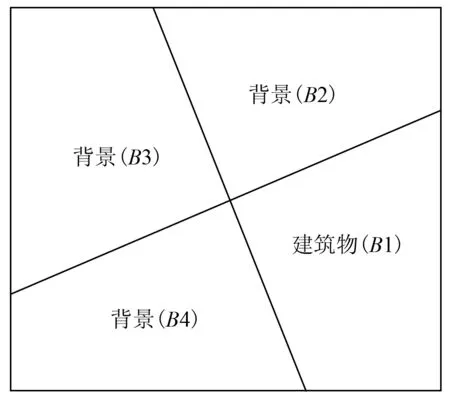
图3 多方向差分法Fig.3 Multi-direction difference method
多方向差分法的计算公式为

(10)

(11)
本文采用的最小二乘模板匹配算法步骤如下:
1)首先依照式(2)对初始值或改正值进行几何畸变改正;
2)重采样得到下一次图像匹配窗口g(△x+xcosφ-ysinφ,△y+xsinφ+ycosφ);
3)依据式(9)计算相关系数ρ,并根据其大小判断是否需要迭代,本文实验设定的相关系数为0.7;
4)若ρ<0.7,根据式(5)—(7)计算参数改正值△x,△y,返回步骤1);
5)直到相关系数大于指定的阈值,且图像窗口满足条件(多方向差分公式(10)(11))或者后一个相关系数小于前一个相关系数为止,记录满足条件的角点位置,转到下一个角点。
1.2.2.2模板的构建
模板合适与否对实验结果影响程度较大。首先,利用Radon变换获取建筑物的主方向(α,α+90);然后,依据建筑物的主方向α,对于一栋建筑物自适应地构建8个方向的模板:左上角、左下角、右上角、右下角(图4(左)为右下角方向模板)及上、下、左、右(图4(中)即为右方向模板)。模板的结构类似图4所示。

图4 模板情况
图4中黑色区域对应于局部图像的背景,其像素值为最佳匹配窗口中的小于所有像素平均值的低像素值的平均值;白色区域对应于图像的前景,其像素值为最佳匹配窗口中的大于所有像素平均值的高像素值的平均值;灰色区域为对应的边缘,取中间值)。根据具体情况,模板取值分布可以调整。
需要说明的是,模板大小要适中,模板太大,容易漏检拐角点;模板太小,则会造成大量的误检点。本文模板的大小分别为9像素×9像素,11像素×11像素,13像素×13像素,15像素×15像素。
根据建筑物拐角点的特征,初始模板的建立是由人工目视,取建筑物拐角点处的像素值,然后初始模板与候选角点逐点进行最小二乘模板匹配,其中相关系数最大的角点即为最佳匹配点。
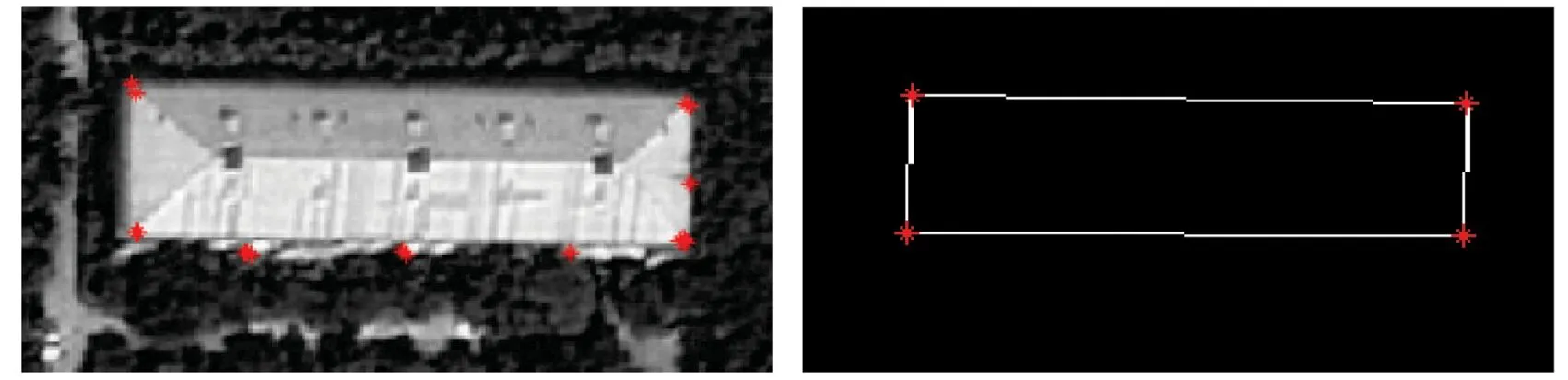
此外,如图5所示,本文后面设计的实验1—实验3的初值是根据初始轮廓线(红色)建立的缓冲区取值。缓冲区外边缘上点的均值为背景像素值;缓冲区内边缘上的点的均值为前景像素值;初始轮廓线上的点的均值为边缘像素值。在实际应用中,应根据建筑物实际情况,建立与拐角类似的模板。

图5 轮廓缓冲区
1.2.2.3误检点的去除
采用最小二乘模板匹配出现的误检点包括:①建筑物拐角点(达到了相关系数阈值,且满足式(10)(11),与实际拐角点的位置可能相距1或0.5 个像素的点);②非建筑物拐角点(因建筑物周围情况较为复杂,存在建筑物一边与其他地物构成转角);③偶然的、纯粹的噪声点(模板与图像误匹配,在实验1合成的图像上就存在这种情况)。
针对①的情况,去除的方法是采取局部归一化原则,在一定的范围内,取相关系数最大的点;若相关系数相同,则取中间点,也就是一定范围内只允许存在一个拐角点;
针对②的情况,在最小二乘模板匹配时,需要利用多方向差分法判断真假拐角点。一般情况下,拐角点处的建筑物与周围地物光谱值有明显的差异,判断图像窗口内的像素分布是否满足式(10)(11),只记录满足条件的匹配点。
经过上述处理,仍可能存在一些误检点,可通过角度阈值予以去除。
如图6所示,以P2点为例,计算P2点与相邻两点(P1,P3)的夹角θ,若不满足|90-θ|<ε3,(ε3=10),则说明P2点与P1,P3在一条直线上,然后计算P3与其相邻两点(P1,P4)的夹角,重复此过程,直到所有的点都处理完为止。

图6 角度阈值
夹角θ的计算式为

(12)
式中d为两点间的欧式距离。
1.3 建筑物外轮廓的获取
由于获取的拐角点并不是有序的,因此需要对角点进行排序。本文采用每个角点与其距离最近的初始轮廓点的次序,对角点排序;在去除误检点的基础上,以直线的形式依次连接每个角点,从而得到完整的建筑物外轮廓。具体步骤如下:
1)针对每一个建筑物斑块,按顺时针获取建筑物的初始轮廓点(Ni),每个点的顺序号为i。
2)利用最小二乘模板匹配获取建筑物拐角点,计算角点(P1,P2,……)到每个建筑物初始轮廓点(Ni)的欧式距离di,假设dmin对应的点为Nj,则这个角点的顺序号即为“j”。
3)按照顺序号“j”对所有角点从小到大排序,这样就得到了一组有序的角点。
4)首先在一定范围内(如5像元×4像元)去除第一类误检点,然后根据式(12)获取位于第一条直线上的拐角点,计算这些点的重心,根据建筑物的2个主方向(α,α+90)获取这条直线起点与终点;接着,以前一条直线的终点为起点,获取位于下一条直线上的拐角点,计算这些点的重心,获取这条直线起点与终点,直到所有直线的起点与终点计算完毕为止。
5)在获得真实拐角点的基础上,依次计算相邻点之间的直线参数,从而得到2点之间其他轮廓点。如图7,首先计算点T1(x1,y1)和T2(x2,y2)之间的直线参数,即

(13)

(14)
式中点(x,y)是点T1和T2之间的建筑物轮廓点。然后依次计算“T2与T3”,“T3与T4”,“T4与T1”之间的建筑物轮廓点,从而得到了完整的建筑物轮廓。
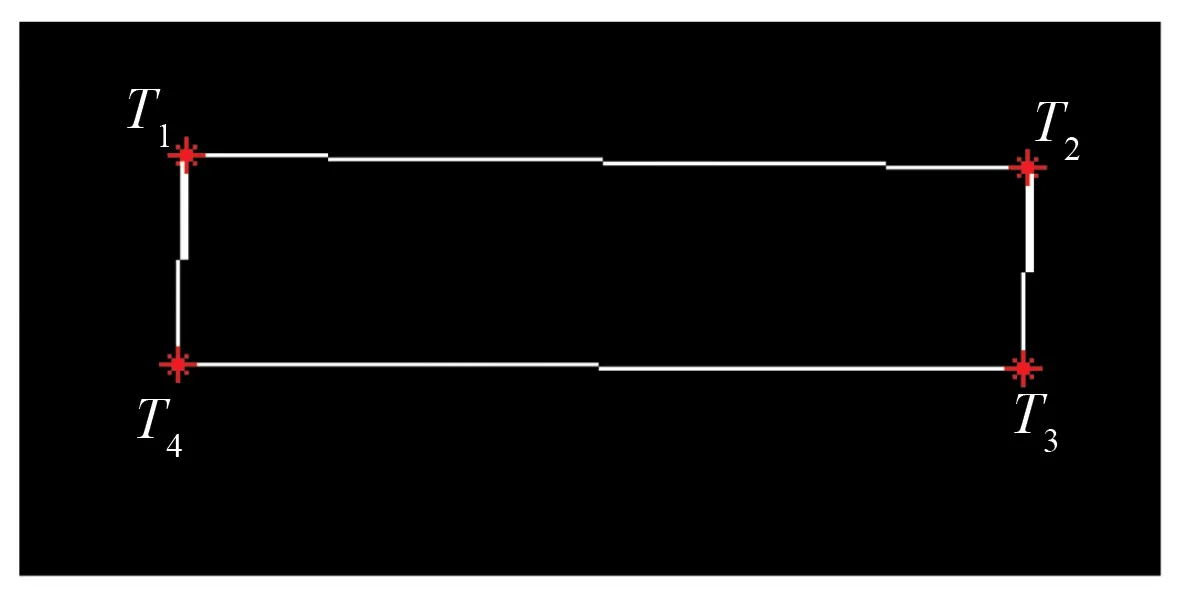
图7 连接相邻拐角点Fig.7 Connect the adjacent corner point
1.4 结果评价方法
本文采用2种方式评价上述提取结果的质量。一是定性比较,即将结果展到原图上与分割结果或其他方法及人工识别结果比较;二是定量比较,即采用完整性Rcom和正确性Rcor进行评价[8],公式为
Rcom=A0/Ar,
(15)
Rcor=A0/Ae,
(16)
式中:A0指与人工识别结果匹配的区域总面积;Ar指人工识别的总面积;Ae指提取结果总面积。
2 实验及分析
2.1 实验1
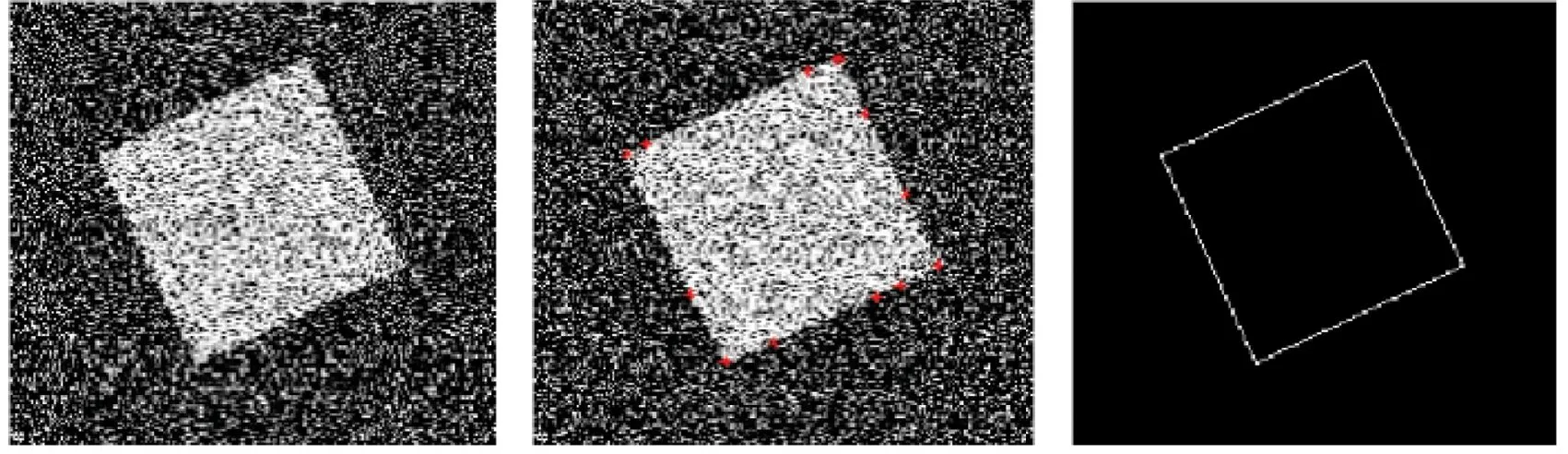
为了说明上述方法的可行性,本实验以人工合成图像为例,进行轮廓信息提取实验(人工合成图像中加入了50%的高斯噪声),如图8所示。
(a) 原图 (b) LSTM结果(c) 提取结果
图8 含噪声50%的合成图像
Fig.8 Synthetic images with 50% NR Gaussian Noise added
从图8可以看出,最小二乘模板匹配检测到的众多角点(图b),通过去除误检点后,提取的轮廓完整(图c),与实际情况(原图)极为符合。
2.2 实验2
本实验选择的建筑物为矩形,且建筑物与周围地物的光谱值差别明显。下面就实验2对本文算法步骤及结果进行详细描述:
1)获取原图(图9(a))上的建筑物斑块如图9(b),分割获取的结果较为完整,但是拐角点处模糊不清。
2)根据建筑物2个主方向(α,α+90)建立模板。图9(c)表示半径为6的轮廓缓冲区内的Harris角点;图9(d)红色点为最佳匹配窗口中心点。
3)用改进的最小二乘模板匹配,其结果如图9(e)所示。
4)去除误检点,依次连接每个真实的拐角点,得到提取结果如图9(f)所示。

(a) 原图(b) 分割结果
(c) Harris角点(蓝色)(d) 最佳匹配点
(e) LSTM结果(f) 提取结果
图9 实验2
Fig.9 Experiment 2
从图9及表1可以看出,对于光谱值差别明显、简单的矩形建筑物,分割结果较为完整,但是存在部分边缘模糊,拐角点不清的情况。经过本文方法处理后轮廓规则,角点位置准确。
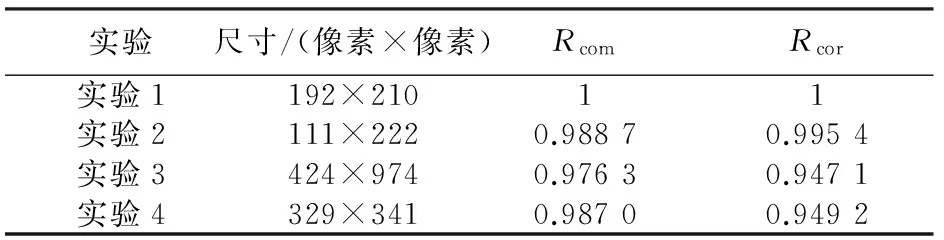
表1 实验结果精度Tab.1 Quantitation evaluation of results
图10(a)中黄色角点是运用文献[20]中方法(在边缘检测算法检测的边缘基础上进行角点的检测与识别)提取的角点;红色角点为本文方法检测到的角点。针对实验2,2种方法的角点检测结果精度差别不大。图10(b)是对文献[20]所提角点处理后,将位于缓冲区内的角点连线而得到的建筑物轮廓线。该轮廓线的Rcom=0.976 0,Rcor=0.999 1。对比图10(b, c, d)可知,2种方法的实验结果均较好,但文献[20]方法是在边缘检测算法检测边缘的基础上,且是在全图范围内提取角点,对于复杂建筑物如2.3节实验3及2.4节实验4,文献[20]所提取的角点无法直接连接。
(a) 拐角点检测结果比较(b) 连接(a)中黄色拐角点

(c) 本文方法的提取结果 (d) 参考数据
图10 与文献[20]的比较
Fig.10 Compared with reference[20]
2.3 实验3
本实验的特点是所选的建筑物不规则,建筑物与周围地物的光谱值差别不明显,且部分边缘不清楚(图11(a))。实验结果如图11及表1所示。

(a) 原图 (b) 初始轮廓线

(c) 本文方法的提取结果(d) 参考数据
图11 实验3
Fig.11 Experiment 3
图11(b)中蓝色线为本文分割所得的建筑物斑块外边缘线,即初始轮廓线,但与实际地物不太吻合,且不规则。图11(c)是采用本文方法提取的规则化的建筑物轮廓线,与参考数据较为符合。
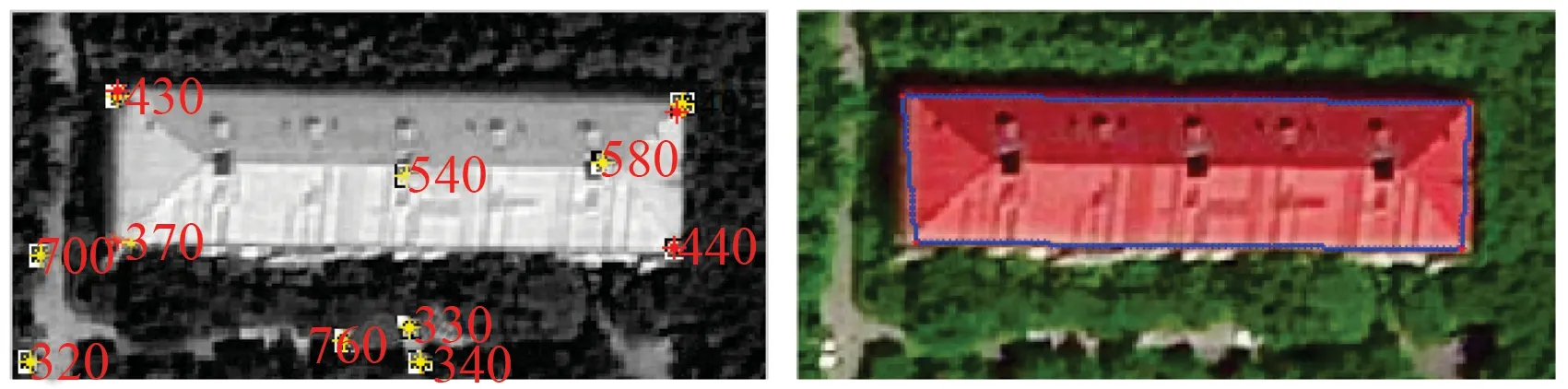
2.4 实验4
本实验的特点是所选建筑物不规则,且其光谱值与周围地物的差别不明显,但是,边缘较为明显(图12(a))。实验结果如图12及表1所示。数据来源于国际摄影测量与遥感协会(ISPRS)。

(a) 原图(b) 文献[2]方法的提取结果

(c) 本文方法的提取结果(d) 参考数据
图12 实验4
Fig.12 Experiment 4
图12(b)是文献[2]中方法(LiDAR point cloud 3.9点/m2)提取的建筑物外轮廓。从图12(b,c,d)可以看出,2种方法得出的建筑物轮廓均符合建筑物的实际特征,说明本方法并不比文献[2]中的方法结果差,而且本方法提取的建筑物更规则,更为完整。
从上述4个实验结果可以看出,采用本文方法可以获得较为符合实际特征的建筑物轮廓,无论是简单矩形建筑物,还是复杂建筑物,其提取的精度都在0.9以上。相对于分割得到的结果,提取的建筑物轮廓较为规则,更为合理,且提取过程只采用了高分辨率影像数据,不需要使用高程及回波强度等信息。
3 结论
本文对基于影像所提取的建筑物斑块进行规则化,对分割所得建筑物轮廓线利用Radon变换以确定建筑物主方向,在轮廓线引导下,设计角点匹配模板以确定建筑物拐角点,通过连接和结合角点,得到规则化建筑物轮廓线。方法的优点在于:
1) 将分割方法与角点特征相结合,充分利用两者的优点,实现了建筑物轮廓的可靠提取;
2) 可以减弱噪声的影响,寻找到较为准确的建筑物拐角点,所提取的建筑物较好地反映了建筑物的外形;
3) 只采用了高分辨率影像数据,不需要使用高程及回波强度等信息;
4)本方法也可用于对其他方法(如level set formulation,graph cut)的建筑物提取结果进行边缘规则化。
需要说明的是,此方法的提取结果受建筑物本身及其周围地物的影响较大。原因是利用最小二乘模板匹配检测到的误匹配点较多,经过去除操作,仍有可能有少量误匹配点无法删除,导致建筑物轮廓存在局部不规则现象。今后将重点研究如何解决这些问题,以实现建筑物轮廓的大范围的精确提取及规则化。
[1] Sumer E,Turker M.An adaptive fuzzy-genetic algorithm approach for building detection using high-resolution satellite images[J].Computers Environment and Urban Systems,2013,39(5):48-62.[2] Awrangjeb M,Fraser C S.Rule-based segmentation of LiDAR point cloud for automatic extraction of building roof planes[C]//ISPRS Annals of Photogrammetry,Remote Sensing and Spatial Information Sciences,Volume II-3/W3.Antalya,Turkey,2013:1-6.[3] 陶超,谭毅华,蔡华杰,等.面向对象的高分辨率遥感影像城区建筑物分级提取方法[J].测绘学报,2010,39(1):39-45. Tao C,Tan Y H,Cai H J,et al.Object-oriented method of hierarchical urban building extraction from high-resolution remote-sensing imagery[J].Acta Geodaetica et Cartographica Sinica,2010,39(1):39-45.
[4] 谭衢霖.高分辨率多光谱影像城区建筑物提取研究[J].测绘学报,2010,39(6):618-623. Tan Q L.Urban building extraction from VHR multi-spectral image using object-based classification[J].Acta Geodaetica et Cartographica Sinica,2010,39(6):618-623.
[5] 杨化超,邓喀中,张书毕.基于Hough变换的航空影像建筑物半自动提取[J].测绘科学,2006,31(6):93-94. Yang H C,Deng K Z,Zhang S B.Semi-automated extraction from aerial image using improved Hough transformation[J].Science of Surveying and Mapping,2006,31(6):93-94.
[6] 田昊.面向遥感影像的建筑物区域理解方法研究[D].长沙:国防科学技术大学,2012. Tian H.Research on Image Understanding of Building Regions in Remote Sensing Images[D].Changsha:National University of Defense Technology,2012.
[7] Cote M,Saeedi P.Automatic rooftop extraction in nadir aerial imagery of suburban regions using corners and variational level set evolution[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(1):313-328.
[8] Li Z B,Liu Z Z,Shi W Z.A fast level set algorithm for building roof recognition from high spatial resolution panchromatic images[J].IEEE Geoscience and Remote Sensing Letters,2014,11(4):743-747.
[9] Jung C R,Schramm R.Rectangle detection based on a windowed Hough transform[C]//Proceedings of 17th Brazilian Symposium on Computer Graphics and Image Processing.Curitiba:IEEE,2004:113-120.
[10]程曦冉,张剑清,张祖勋.航空影像多直角平顶房屋的半自动提取[J].武汉大学学报:信息科学版,2005,29(12):1097-1100. Cheng X R,Zhang J Q,Zhang Z X.Semi-automatic extraction of houses with multi right angles from aerial images[J].Geomatics and Information Science of Wuhan University,2005,29(12):1097-1100.
[11]秦永,宋伟东.基于Freeman编码的遥感影像直角型房屋半自动提取方法研究[J].测绘科学,2009,34(6):203-205. Qin Y,Song W D.Semi-automatic extraction of right-angle houses from remote sensing imagery based on Freeman code chain[J].Science of Surveying and Mapping,2009,34(6):203-205.
[12]黎瑾慧.基于Gabor滤波器和MRF的道路影像分割方法研究[D].南京:河海大学,2009. Li J H.Segmentation Algorithm for Road Images Using Gabor Filter and Markov Random Field[D].Nanjing:Hohai University,2009.
[13]周绍光,陈超,岳建平.形状先验和图割的高分辨率遥感影像道路段提取[J].测绘学报,2014,43(1):60-65. Zhou S G,Chen C,Yue J P.Extracting roads from high-resolution RS images based on shape priors and graph cuts[J].Acta Geodaetica et Cartographica Sinica,2014,43(1):60-65.
[14]Boykov Y,Kolmogorov V.An experimental comparison of Min-Cut/Max-Flow algorithms for energy minimization in vision[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(9):1124-1137.
[15]Gruen A,Agouris P.Linear feature extraction by least squares template matching constrained by internal shape forces[C]//Proc.SPIE 2357,ISPRS Commission III Symposium:Spatial Information from Digital Photogrammetry and Computer Vision.Munich,Federal Republic of Germany:SPIE,1994:316-333.
[16]Hu X Y,Zhang Z X,Tao C V.A robust method for semi-automatic extraction of road centerlines using a piecewise parabolic model and least square template matching[J].Photogrammetric Engineering and Remote Sensing,2004,70(12):1393-1398.
[17]Kim T,Park S R,Kim M G,et al.Tracking road centerlines from high resolution remote sensing images by least squares correlation matching[J].Photogrammetric Engineering and Remote Sensing,2004,70(12):1417-1422.
[18]Hu X Y,Zhang Z X,Li J.Linear feature extraction using adaptive least-squares template matching and a scalable slope edge model[J].International Journal of Remote Sensing,2009,30(13):3393-3407.
[19]Awrangjeb M,Lu G J.Robust image corner detection based on the chord-to-point distance accumulation technique[J].IEEE Transactions on Multimedia,2008,10(6):1059-1072.
[20]Awrangjeb M,Lu G J,Fraser C S,et al.A fast corner detector based on the chord-to-point distance accumulation technique[C]//Proceedings of Digital Image Computing:Techniques and Applications.Melbourne:IEEE,2009:519-525.
[21]Awrangjeb M,Lu G J,Fraser C S.Performance comparisons of contour-based corner detectors[J].IEEE Transactions on Image Processing,2012,21(9):4167-4179.
(责任编辑:刁淑娟)
Extraction of building contour from high resolution images
ZHOU Shaoguang1, SUN Jinyan1, FAN Li1, XIANG Jing1, CHEN Chao2
(1.SchoolofEarthScienceandEngineering,HohaiUniversity,Nanjing210098,China;2.ProvincialGeomaticsCenterofJiangsu,Nanjing210013,China)
Since the building profile obtained by segmentation or other methods has the disadvantages of inaccuracy or irregularity, this paper presents a new approach to extract the outlines of buildings: Firstly, images are preprocessed by combining spectral characteristics and multi-angle texture characteristics obtained by one dimensional Gabor filter of images to form characteristics to be segmented. On the basis of the construction of graph by Gaussian mixture model, the candidate points of the building can be determined by graph cuts, and the building blob can be obtained by mathematical morphology. Then according to segmentation objects, the main direction of the building is detected by the Radon transform, the least square matching templates are created, and the corner points are extracted precisely in the outline buffer zone. Finally, the accurate corner points are connected to constitute the outlines of the building. This method was tested by using synthetic image and high resolution images. The experimental result proves that this method is feasible.
least square template matching;high resolution image;building contour;graph cuts;image segmentation
2014-05-15;
2014-08-15
国家自然科学基金项目“高分辨率遥感影像中城市道路网的提取方法研究”(编号:41271420/D010702)资助。
10.6046/gtzyyg.2015.03.10
周绍光,孙金彦,凡莉,等.高分辨率遥感影像的建筑物轮廓信息提取方法[J].国土资源遥感,2015,27(3):52-58.(Zhou S G,Sun J Y,Fan L,et al.Extraction of building contour from high resolution images[J].Remote Sensing for Land and Resources,2015,27(3):52-58.)
TP 79
A
1001-070X(2015)03-0052-07
周绍光(1966-),男,副教授,主要从事摄影测量与遥感和数字图像分析研究。Email:zhousg1966@126.com。
孙金彦(1989-),女,硕士研究生,主要从事遥感和数字图像分析研究。Email:sun_jin_yan@126.com。
猜你喜欢
计算机仿真(2021年8期)2021-11-17
装备制造技术(2020年1期)2020-12-25
考试与评价·七年级版(2020年4期)2020-10-23
计算机系统应用(2020年1期)2020-01-15
制造技术与机床(2019年11期)2019-12-04
电子技术与软件工程(2018年10期)2018-07-16
中国交通信息化(2017年4期)2017-06-06
美文(2017年4期)2017-02-23
小雪花·初中高分作文(2016年5期)2016-05-14
自然资源遥感(2012年4期)2012-12-27