多全球导航卫星系统联合的探月飞行器轨道定位分析*
2015-03-09 01:21黄仰博刘文祥
国防科技大学学报 2015年3期
陈 雷,黄仰博,刘文祥,欧 钢
(国防科技大学电子科学与工程学院,湖南长沙410073)
近年来,以美国的全球定位系统(Global Position System,GPS)、欧洲的伽利略卫星导航系统(Galileo satellite navigation system,Galileo)、俄罗斯的格洛纳斯全球卫星导航系统(GLObal NAvigation Satellite System,GLONASS)和中国的北斗卫星导航系统(BeiDou navigation satellite System,BDS)为主的全球导航卫星系统(Global Navigation Satellite System,GNSS)已经广泛运用到了陆地、海洋、航空乃至航天领域。GNSS的应用在中轨道(Medium Earth Orbit,MEO)和低轨道(Low Earth Orbit,LEO)飞行器定位领域已经十分成熟,定轨精度可达厘米级[1-2];在地球静止轨道(Geostationary Earth Orbit,GEO)和大椭圆地球轨道(Highly Elliptical Earth Orbit,HEEO)等高地球轨道(High Earth Orbit,HEO)上的应用也正在探索之中。其难点[3]在于:可见卫星数目少,信号强度弱,大气层传播误差不同。当用户星轨道高度高于3000km时,GPS对于用户的可见性明显变差[4]。但是,近年来一系列研究成果[5-6]表明:高灵敏度GNSS接收机在GEO,HEO上的应用是可行的。
随着深空探测技术研究的不断深入,需要将目前GNSS对航天器定轨的研究拓展到深空领域。当前探月飞行器测定轨任务所使用的是甚长基线干涉测量(Very Long Baseline Interferometry,VLBI)[7]手段,使用超大型天线和复杂昂贵的地面无线电设备,必须保证在几十万千米的距离上有可靠的无线电通信的能力[8]。而利用GPS对探月飞行器定轨的研究主要集中于近地段。现有文献没有涉及GNSS在月球轨道上的应用。
陈雷等针对探月飞行器GNSS多系统联合定位的可行性进行研究。具体分析了系统联合方式、载噪比(Carrier-power-to-Noise density ratio,C/N0)、天线辐射方向图和几何精度因子(Geometric Dilution of Precision,GDOP)值等制约深空环境下定位解算的关键因素,对比论证GNSS多系统联合的探月飞行器定位性能。
1 深空定位约束条件分析
1.1 几何约束条件
为深空飞行器提供导航服务是GNSS未来的发展方向之一。对于目前在建的BDS,Galileo系统和GLONASS的仿真,均以系统的“满星”状态分析。仿真时段内月球轨道参数设为发布数据的平均值。已知月球公转周期(恒星月)约为27.321 66d,考虑地球公转后的月相周期(朔望月)为29.530 488d。研究的对象是月球轨道飞行器,因此仿真使用恒星月为周期。仿真时间为2008-07-01T 12:00:00.000至2008-07-28T 19:43:11.424。
如图1所示,位于深空位置处的飞行器远离地球,高于GNSS轨道,因此探月飞行器在月球轨道上只能采用下视天线接收来自地球另一侧的卫星信号。只有探月飞行器运行至地球遮挡半锥角之外、信号辐射半锥角之内的区域(图1中AB,CD弧段)时,方可接收该卫星发射的导航信号。而处于BC弧段的飞行器受到地球的遮挡无法收到信号[9],位于其他弧段的飞行器由于辐射角度限制同样无法接收来自该卫星的导航信号。由图1可知,GPS信号被地球遮挡住的波束范围是±13.84°。根据星上天线方向图可得导航卫星天线的波束辐射范围[10],如图2所示。图2是GPS卫星L波段天线发射波束方向图的正半轴,负半轴方向图与之关于y轴对称。因此天线发射的主瓣信号位于[-21.3°,21.3°]的区域,旁瓣信号位于[-47°,-21.3°]∪[21.3°,47°]的区域。其余导航系统的星上天线方向图暂未公开,仿真以GPS的方向图为准。因此,当仅接收GNSS的主瓣信号时,探月飞行器可接收的范围是[-21.3°,-13.84°]∪[13.84°,21.3°]。
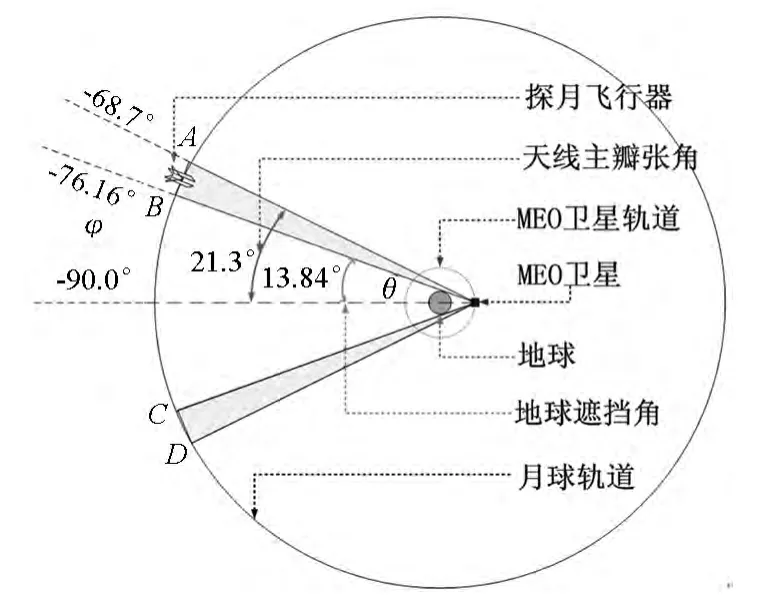
图1 探月飞行器与GNSS相对位置示意Fig.1 Relative position of lunar explorer and GNSS
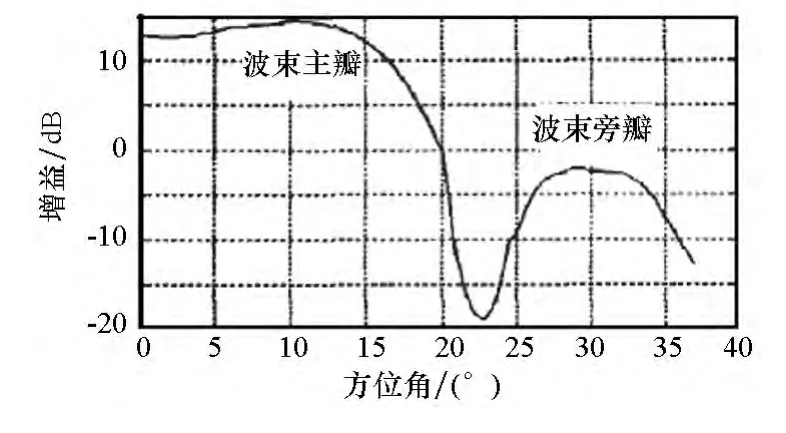
图2 GPS L波段天线发射方向与增益的关系Fig.2 Relation between launch and gain of GPS L band antenna
GPS卫星俯仰角的法向是以地心为中心的径向方向(此时以卫星为观测点,正对地球方向为-90°),因此根据换算关系可得对应的可用信号仰角范围是

1.2 C/N0约束条件
现有文献对GPS空间覆盖性的分析仅从几何角度考虑,并没有考虑到接收灵敏度的影响。因此有必要对C/N0的影响进行分析。
已知飞行器上的接收机信号C/N0与等效全向辐射功率(PEIRP)、自由空间损耗(Ld)、接收天线增益(Gr)有关。接收机的接收功率为:

其中:Pr单位为dBW;PEIRP为天线发送功率和天线增益的乘积,单位为dBW;Ld和传播距离有关,距离越远损耗越大:

1.2.1 主瓣信号的C/N0
以GPS的L1频点为例,信号频率、功率分别为:fL1=1575.42MHz,PEIRP=56.8dBW=26.8dBm,光速取c=299 792 458m/s。以2008-07-01T 12:00:00为起始时刻,GPS的2号星与飞行器的距离R=345 319.600 831km,由式(3)得:Ld=-207.16dB。对于通用地面GPS接收机,全向天线增益Gr一般为3.0dB(星载接收机和深空飞行器使用非全向天线,Gr可有针对性地提高)。由式(2)可得,一般全向天线的接收机在该点的信号接收功率Pr为-147.36dBm。相对空间噪声本底而言的C/N0为26.64dBHz,是可以捕获的。
1.2.2 旁瓣信号的C/N0
国外研究结果表明高轨接收机接收GPS旁瓣信号是可行的[11]。其中,PiVoT接收机[12]能够在HEO上捕获GPS的主瓣和旁瓣信号。但是在月球公转轨道上,信号极其微弱,旁瓣信号的接收必须考虑发射天线旁瓣辐射的功率损耗。以GPS为例,旁瓣信号要比主瓣信号低15dB,信号接收C/N0降为11.64dBHz。近年来的相关文献表明:一般的弱信号接收机可有效处理C/N0低至21dBHz的信号[13],而采用扩展卡尔曼滤波器的弱信号接收机能够捕获并持续跟踪15dBHz的信号[14],并将应用于高轨GPS接收机。另一方面,通过提高卫星信号发射功率,飞行器采用更高增益的定向接收天线,或是在发射卫星背向安装服务于深空定位的专用发射天线,都将提高探月飞行器GNSS信号接收的C/N0。
2 信号主瓣、旁瓣的可见性分析
探月飞行器从发射到绕月飞行需经历地球调相轨道、地月转移轨道、月球捕获轨道三个阶段。而对于GNSS定位来说,最重要的是远离地球的月球捕获轨道阶段。由于地月距离约为地球半径的60倍,故将月球作为点单元进行分析。因此,以月球质心为月球公转轨道飞行器的参考点进行几何可见性分析。
2.1 主瓣信号接收
2.1.1 单系统可见性
首先对GPS,BDS,Galileo和GLONASS的单系统可见性分别进行仿真分析。由于定位解算至少需要4颗卫星信号同时接收,以GPS为例,通过计算可得可视卫星数量不少于4的时段仅占仿真周期的0.089 6%。因此,仅有极少时段能够实现定位解算,使用GPS单系统完成探月飞行器轨道定位是不可行的。同时通过计算可得,仿真过程中所有GPS卫星到飞行器的信号C/N0均高于27dBHz,与前文理论推导结论相符。
2.1.2 多系统可见性
双系统联合时,系统间钟差不同,需要至少5个方程进行求解。同理,三系统联合需要6个方程求解,四系统联合需要7个方程求解。
以四系统为例,仿真结果如图3所示。仿真时间以1min间隔步进,原始数据的计算结果参见表1、表2,而为了更加直观体现多系统联合定位时各系统所做的贡献,图3~5在绘图时将可见星数按日做平均。
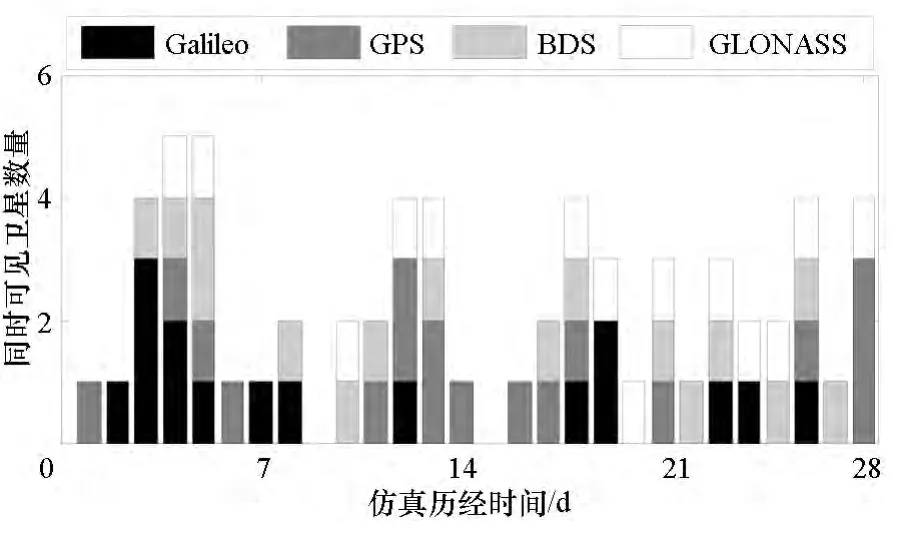
图3 四系统联合的卫星可见时段示意图Fig.3 Visible satellites quantity of 4 systems
在仿真时段中,多数时段不满足四系统7星(或三系统6星、双系统5星、单系统4星)的定位条件。因此,仅考虑主瓣信号接收时多系统联合无法满足定位需求,其余联合方式的对比结论参见表1、表2中“主瓣接收可见时段百分比”一栏。
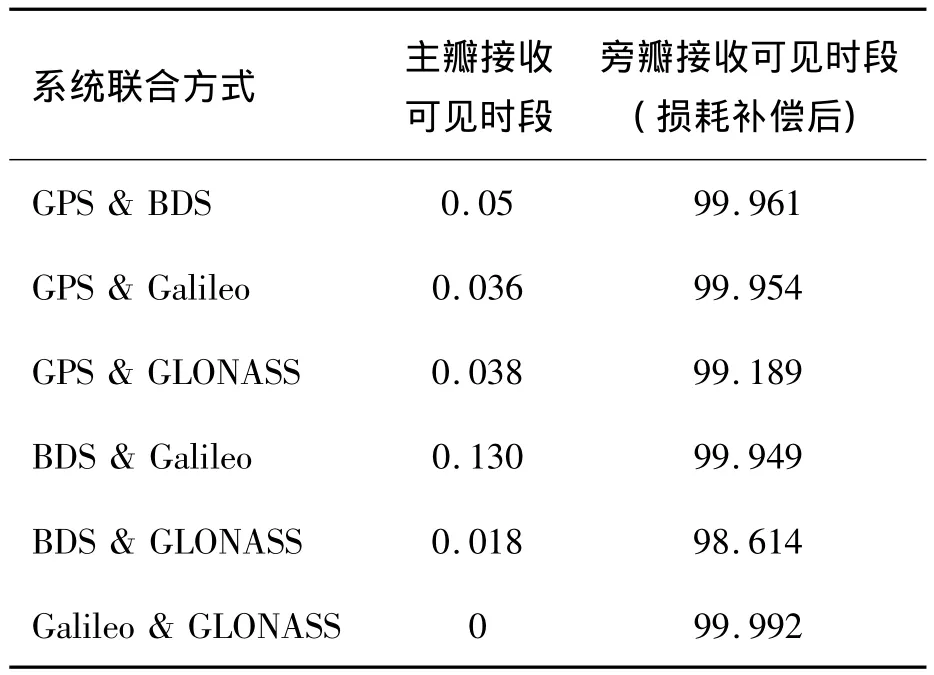
表1 双系统联合的可见时段百分比Tab.1 Percentage of available time of dual-systems%

表2 多系统联合的可见时段百分比Tab.2 Percentage of available time of multi-systems%
2.2 旁瓣信号接收
2.2.1 旁瓣损耗补偿前
当无法通过提高接收天线增益或者发射信号功率来补偿链路损耗时,考虑旁瓣信号的15dB损耗,以最低载噪比门限(15dBHz)对主瓣、旁瓣信号接收进行仿真。仿真结果如图4所示,四系统联合对月球轨道飞行器的可见性不能满足定位的基本条件。三系统联合也无法满足需求。具体数据参见表2中“旁瓣接收可见时段-损耗补偿前”一栏。
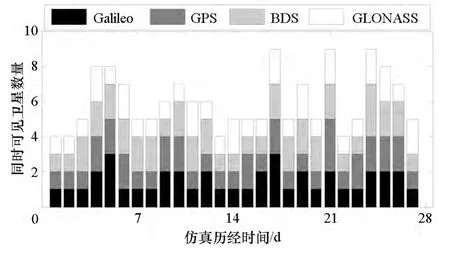
图4 旁瓣有损时四系统联合卫星可见性Fig.4 Visibility of 4 systems with side lobe loss
2.2.2 旁瓣损耗补偿后
在不考虑实现代价的情况下,通过上文所述方法提高信号接收C/N0,使其达到接收门限。如图5所示,旁瓣损耗补偿后GNSS的四系统联合可满足探月飞行器月球公转轨道全时段定位需求。
旁瓣损耗补偿后的三系统联合定位中,GPS,BDS,Galileo和GLONASS的任意三者联合均满足上述目标场景下的定位条件,具体参见表2第4列“旁瓣接收可见时段-损耗补偿后”的统计数据。
对于双系统联合方式。仿真结果参见表1“旁瓣接收可见时段(损耗补偿后)”一栏。由表1可知,大部分时段可以满足定位条件(双系统5颗星或单系统4颗星),但还有少部分时段无法定位。
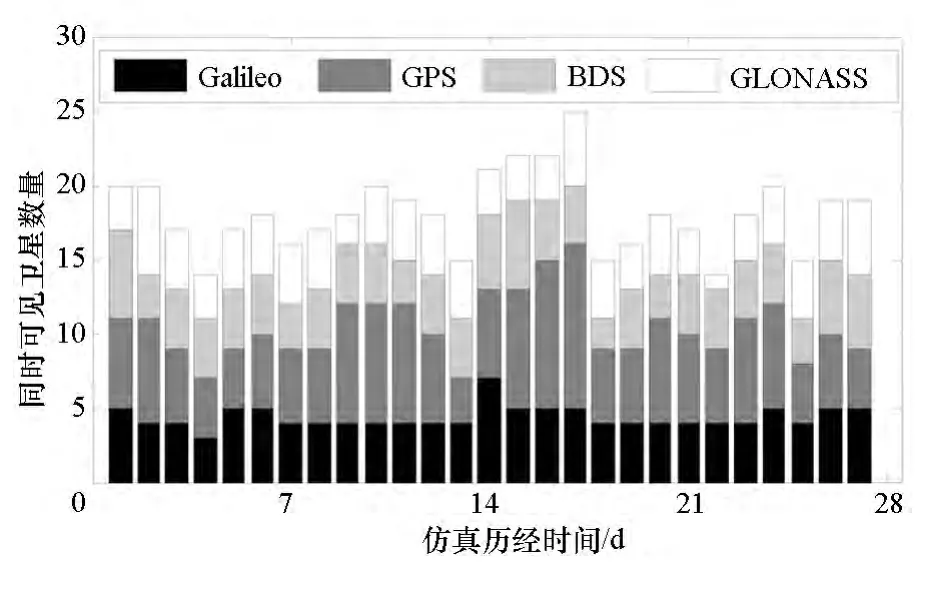
图5 旁瓣损耗补偿时四系统联合卫星可见性Fig.5 Visibility of 4 systems with side lobe loss compensation
3 多系统联合DOP值对比
由于旁瓣信号接收后,三系统或四系统联合定位的可见卫星数均满足定位需求。星座的布局将直接影响其精度因子(Dilution of Precision,DOP),多系统联合定位相对于单系统具有更完整的星座构型。对于三系统联合定位而言,选择DOP值较小的联合方式既能降低设计复杂度(相对四系统而言),又能改善定位精度。
3.1 DOP值理论计算
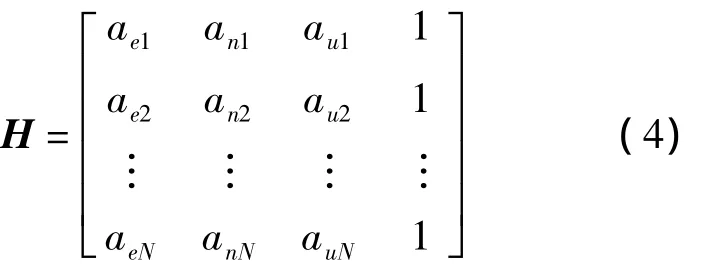
以GDOP为标准,分析系统联合对误差放大量的影响。首先根据地心直角坐标系中的飞行器站心坐标系下的单位矢量计算H矩阵,如式(4)所示,进而计算GDOP值。其中,a i=[aei,ani,aui](i=1,2,…,N)是飞行器指向卫星i的单位矢量(正x轴指东,y轴指北,z轴指天)。
文献[15]详细推导了利用站心系下GDOP的计算过程,此处仅给出结论。

其中,Dij为式(6)中矩阵(HTH)-1对角线上的元素。
文献[16]详细介绍了利用站心系下的仰角、方位角计算上述(H T H)-1矩阵中Dij的原理与推导过程,此处不再赘述。
3.2 DOP值仿真分析
多系统联合的精度因子仿真结果如图6所示。其中,仿真历经时间的步进间隔为60s。由图6可知,单系统、双系统联合的GDOP值不满足精度要求。四系统联合相比三系统联合GDOP值下降16.93%。

图6 各系统联合时的GDOP值Fig.6 GDOP value of different system united
其余各类精度因子时变曲线如图7所示,仿真时长24h,步进间隔30min。其中,PDOP(Position Dilution of Precision)表示位置精度因子、HDOP(Horizontal Dilution of Precision)表示水平精度因子、VDOP(Vertical Dilution of Precision)表示垂直精度因子、TDOP(Time Dilution of Precision)表示时间精度因子。
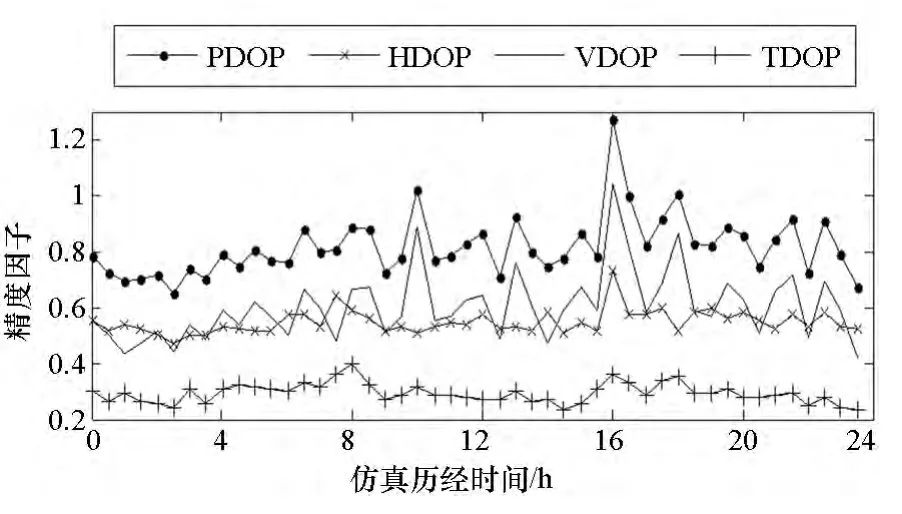
图7 四系统联合时的各类精度因子变化值Fig.7 Different kinds of DOP value for 4 systems united
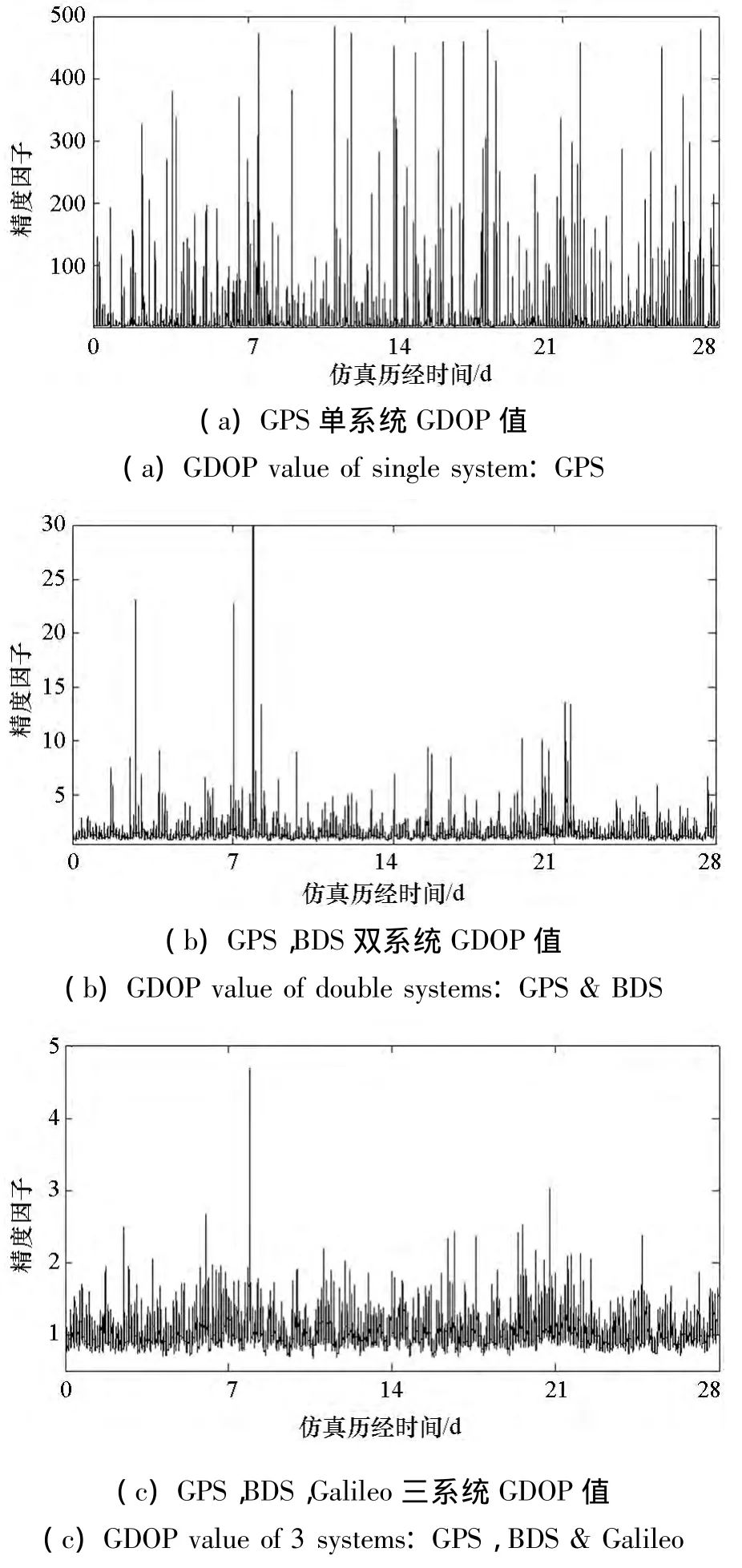
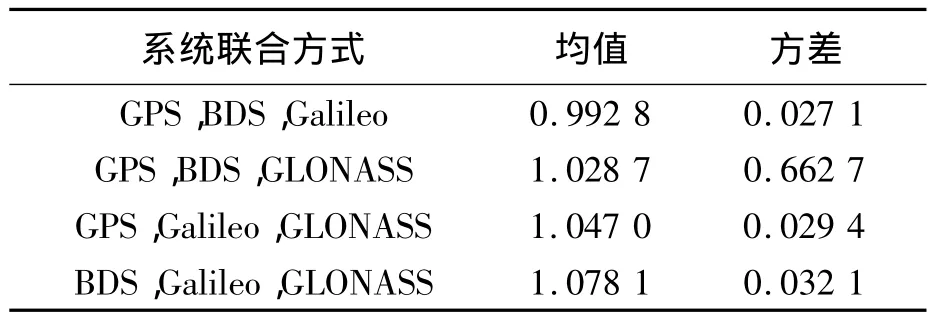
表3 三系统联合GDOP均值方差对比Tab.3 Mean and variance comparison of GDOP for 3 systems united
由2.1节可见性分析可知,旁瓣损耗补偿后三系统联合的可见卫星数满足定位条件。在考虑系统资源和接收机设计复杂度的情况下,三系统联合比四系统联合拥有更好的应用前景。因此对比三系统联合的4种情况,GDOP均值和方差的计算见表3。仿真计算结果表明,GPS,BDS和Galileo联合方式拥有更优的GDOP值。因此,应用于探月飞行器的三系统联合定位接收机设计可以优先考虑GPS,BDS和Galileo联合的情况。从硬件兼容性角度考虑该联合方式也更具优势。
4 结论
理论分析和仿真结果表明,当仅接收GNSS天线辐射方向图的主瓣信号时,无论哪种联合方式都无法满足月球公转轨道飞行器的定位条件。考虑接收旁瓣信号后,由于旁瓣信号损耗15dB,在同等接收C/N0下依旧不能满足月球轨道飞行器全时段GNSS联合定位的需求。因此,必须通过增加天线增益、提高发射功率、增加卫星背向天线等方式弥补旁瓣损耗。当接收机C/N0达到捕获门限后,利用GNSS中任意三个系统的联合,即可实现月球公转轨道飞行器全时段定位解算。通过DOP的仿真和计算可知,四系统联合的GDOP最优,三系统联合时,GPS,BDS和Galileo系统联合的GDOP波动最平缓,硬件实现也更简单。研究结果为GNSS多系统联合的探月飞行器定位技术研究以及星载多系统集成接收机设计提供理论参考。
References)
[1]Zhao Q,Liu J,Ge M,et al.Precision orbit determination of champ satellite with cm-level accuracy[J].Geomatics and Information Science of Wuhan University,2006,31(10):879-882.
[2]Gold K,Brown A.Architecture and performance testing of a software GPS receiver for space-based applications[C]//Proceedings of the National Technical Meeting of the Institute of Navigation,2004:624-635.
[3]李春玲,高晓颖,孙梅,等.GPS在深空中的应用情况研究[C]//全国第十二届空间及运动体控制技术学术会议论文集,2006:167-170.LI Chunling,GAO Xiaoying,SUN Mei,et al.GPS application in deep space[C]//Proceedings of the 12th National Space and Moving Body Control Technology Conference,2006:167-170.(in Chinese)
[4]俞朔春,高益军.基于GPS的高轨道卫星自主定轨技术可行性分析研究[J].控制工程,2006(1):38-42.YU Shuochun,GAO Yijun.High orbit GPS satellite autonomous orbit technique based on analysis of feasibility study[J].Control Engineering,2006(1):38-42.(in Chinese)
[5]柳丽,董绪荣,郑坤,等.星载GNSS确定GEO卫星轨道的积分滤波方法[J].中国空间科学技术,2011(1):70-75.LIU Li,DONG Xurong,ZHENG Kun,et al.Load GNSS determine the integral filter method of the orbit of GEO satellite[J].Chinese Space Science and Technology,2011(1):70-75.(in Chinese)
[6]詹鹏宇.基于GNSS的高轨卫星定轨技术研究[D].南京:南京航空航天大学,2012.ZHAN Pengyu.Study on high orbit satellite orbit determination technology based on GNSS[D].Nanjing:Nanjing University of Aeronautics&Astronautics,2012.(in Chinese)
[7]董光亮,陈少伍,李海涛.月球轨道器交会对接地面高精度导引技术研究[J].飞行器测控学报,2013,32(1):1-6.DONG Guangliang,CHEN Shaowu,LI Haitao.Research on high precision ground-based navigation of lunar orbiter rendezvous and docking[J].Journal of Spacecraft TT&C Technology,2013,32(1):1-6.(in Chinese)
[8]文援兰,王威,曾国强,等.地面站对月球探测器的导航[J].国防科技大学学报,2001,23(6):33-37.WEN Yuanlan,WANG Wei,ZENG Guoqiang,et al.Navigation for the lunar probe based on ground tracking sites[J].Journal of National University of Defense Technology,2001,23(6):33-37.(in Chinese)
[9]郗晓宁,曾国强.月球探测器轨道设计[M].北京:国防工业出版社,2001.XI Xiaoning,ZENG Guoqiang.Lunar trajectories design[M].Beijing:National Defense Industry Press,2001.(in Chinese)
[10]Parkinson B W,Spilker J J.Global positioning system:theory and applications volume I[M].USA:Washington American Institute of Aeronautics and Astronautics,1996:234-242.
[11]Kronman J D.Experience using GPS for orbit determination of a geosynchronous satellite[C]//Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation,Salt Lake City,2000:1622-1626.
[12]Moreau M C.Test results of the PiVoT receiver in high earth orbits using a GSS GPS simulator[C].ION GNSS Meeting,Salt Lake City,UT,USA,2001.
[13]谢燕军.高轨航天器中GPS弱信号处理及自主定轨技术[D].哈尔滨:哈尔滨工程大学,2011.XIE Yanjun.Rail technology and independent set in high orbit spacecraft GPS weak signal processing[D].Harbin:Harbin Engineering University,2011.(in Chinese)
[14]Psiaki L M,Jung H.Extended Kalman filter methods for tracking weak GPS signals[C]//Proceedings of the 15th International Technical Meeting of the Satellite Division of the Institute of Navigation,2002:2539-2553.
[15]Kaplan D E,Hegarty J C.GPS原理与应用[M].寇艳红,译.2版.北京:电子工业出版社,2008:242-245.Kaplan D E,Hegarty J C.Understanding GPS principles and applications[M].Translated by KOU Yanhong.2nd ed.Beijing:Publishing House of Electronics Industry,2008:242-245.(in Chinese)
[16]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.XIE Gang.Principle of GPS and receiver design[M].Beijing:Electronic Industry Press,2009.(in Chinese)
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
凤凰动漫(军事大王)(2022年1期)2022-04-19
海军航空大学学报(2020年2期)2020-07-27
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
电子制作(2018年2期)2018-04-18
电子技术与软件工程(2017年12期)2017-07-05
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
电测与仪表(2016年14期)2016-04-11