上袋机械手设计与动态性能分析
2015-03-07 09:24孙明迁唐火红骆敏舟
合肥工业大学学报(自然科学版) 2015年8期
孙明迁, 唐火红, 骆敏舟, 陈 伟
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.中国科学院 常州先进制造技术研究所,江苏 常州 213164)
随着工业自动化程度和包装技术的快速发展,先进、快速、稳定的自动化设备需求日益增大,高水平全自动套袋机作为自动化包装生产线的重要设备,代替人工劳动完成套袋工作,其研究受到前所未有的关注[1]。上袋机械手是全自动套袋机的关键部件,其合理性和动态性能的优劣影响着套袋速度、准确性和成功率。
本文模仿人工套袋动作设计上袋机械手,对不同工况下的上袋机械手进行动态性能仿真分析,对结构进行优化后,通过再次仿真和试验验证优化的正确性。
1 上袋机械手虚拟样机设计
1.1 机构原理
人工完成套袋时,包括以下几个动作:张开袋口、撑住袋口、手指捏住袋边、套袋。模仿人工套袋动作过程,上袋机械手工作时,上行机构吸盘将袋口张开,上袋机械手的插刀机构插进袋口以撑开包装袋处于张开状态,模仿人工套袋过程中的手指撑袋;用夹袋手指机构夹住包装袋的两边,模仿人工套袋过程中的2个手指捏住包装袋;上袋机械手手臂带着撑开袋口的包装袋转动,套在物料出料口,完成套袋过程,如图1所示。
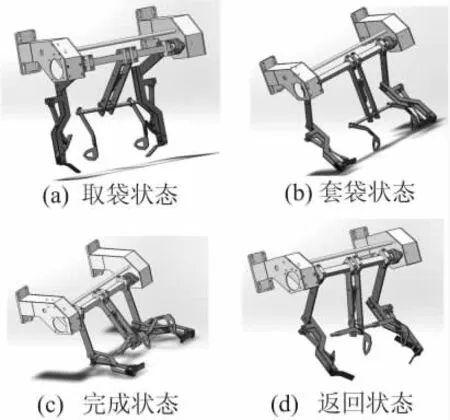
图1 上袋机械手工作流程图
上袋机械手由1根转动轴、左右2个机械手臂、撑袋机构组成。轴中间结构截面为方形,方形截面轴可以传递较大的扭矩,保证轴高速运动和稳定性。手臂机构和撑袋机构用固定件卡在方轴上。这种传动方式稳定、工作可靠。转动轴用轴承支撑,采用伺服电机配合减速机驱动,通过直连方式将运动和动力传递给转动轴。
1.2 机构设计
根据套袋动作以及工作环境的要求,上袋机械手的设计须遵守以下原则:① 上袋空间有限,套袋轨迹、位置要求精确,要求上袋机械手机械结构紧凑,具有较大的工作空间体积比;② 模仿人工套袋动作手臂、手指的功能设计,要求结构简单、灵活;③ 借助有限元分析软件对机构进行动态性能分析,并优化设计方案。
1.2.1 手指机构设计
手指机构如图2所示。
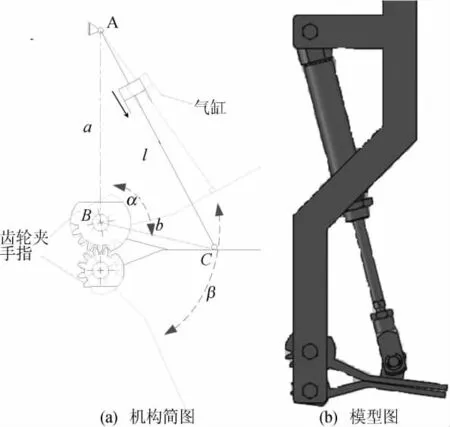
图2 手指机构
模仿人工套袋过程中2个手指捏住包装袋的动作,采用2个夹板机构夹袋边,夹板的一端设计成齿数为5的不完全齿轮结构,上方手指的中间连接气缸杆,气缸的另一端用铰链固接在上袋手臂上,气缸带动上方手指转动,2个手指通过2个不完全齿轮啮合,便可以实现手指机构的张开和闭合;β为2个齿轮夹变化的夹角;l为气缸和连杆长度,气缸行程为75mm。

其中,α、a、b为已知量;235≤l≤310。由(1)式可解出0°≤β≤100°,即2个手指角度变化为0°~100°。
1.2.2 撑袋机构设计
撑袋机构采用对称布置的插刀来模仿人手指撑袋过程,插刀对称分布在转轴上,轴的中间连接气缸接头,气缸布置在上袋机械手的中间部位,如图3所示。气缸带动插刀旋转运动,当袋口张开时,插刀采用圆弧状边界插进袋口,不仅使插刀顺利插进袋口,同时其宽度也使袋口保持张开。
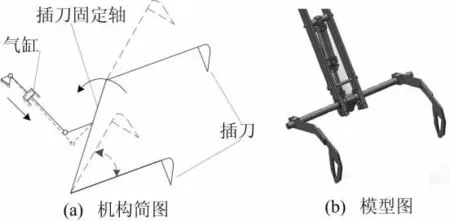
图3 撑袋机构
1.2.3 手臂机构设计
模仿人工套袋中的手臂,设计2个手臂均匀分布两侧,类似人体上肢的大臂Q1Q2和小臂Q2Q3,如图4所示。
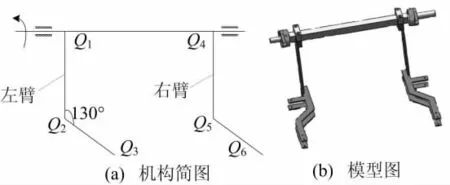
图4 手臂机构
由于套袋运动自由度不多,手臂机构采用大臂小臂固结的整体手臂结构,两臂夹角为130°;手臂机构用伺服电机配合减速机驱动,左、右手臂上各安装一套手指机构,中间安装撑袋机构,手指机构和撑袋机构随手臂一起转动。
2 旋转预应力下模态分析
模态分析是研究上袋机械手的振动特性,高速旋转时的上袋机械手易产生振动,会影响套袋准确度和稳定性[2-6]。分析结构固有频率,对结构进行优化以提高固有频率,提升工作稳定性、可靠性。上袋机械手作为运动系统,其动力学方程为:

其中,m、c、k分别为系统的质量矩阵、阻尼矩阵、刚度矩阵;F(t)为激励矢量;q为位移矢量。
模态分析是建立有限元模型进行数值分析的过程。对于一般的多自由度结构系统而言,运动都可以由其自由振动的模态来合成。系统的固有频率由其本身属性决定,与外载荷无关;系统结构阻尼主要发生在固定的或可动的连接部位,内阻尼只是吸收、损耗能量的一部分,对其模态频率及振型的影响很小,所以模态分析的实质是求解具有有限个自由度的无阻尼及无载荷状态下的运动方程的模态适量,其动力学方程[2]可简化为:

假设系统是由一系列的简谐振动组成,则有:

其中,φ为特征矢量或振型;ω为角频率;a为初相角。(3)式可简化为:

上袋机械手高速旋转工作时,上袋机械手结构会产生旋转预应力,结构刚度因为旋转预应力的存在发生变化,影响系统的固有频率,所以在进行上袋机械手结构系统模态分析时,考虑预应力因素具有重要意义。存在旋转预应力的情况下,(5)式变为:

其中,s为旋转预应力刚度矩阵。
对det(k+kr-ω2m)=0求解,可得到n个特征值ωi(i=1,2,…,n),即为系统的固有频率,将解带入(6)式,即可得到振型φi。
运用SolidWorks对上袋机械手进行虚拟样机设计,再将模型导入ANSYS。根据圣维南原理,对模型进行简化处理,忽略倒角、螺纹、小孔等,对上袋机械手中的手指机构和撑袋气缸采用等质量块替代,不影响整体结构的动态性能分析,节省分析时间。材料弹性模量为206GPa,密度为7.8×103kg/m3,泊松比为0.3,采用四面体单元对模型进行网格划分,得到有限元模型。
3 结构模态分析
上袋机械手结构有限元模型建立后,添加约束、求解。分别在以下3种工况下求解:① 上袋机械手静止,不存在旋转预应力状况;② 上袋机械手逆时针转动时存在预应力状况;③ 上袋机械手顺时针转动时存在预应力状况。由于低阶频率对上袋机械手结构系统的振动影响较大,高阶频率对动态特性分析意义不大,同时前3阶振型对套袋稳定性、成功率影响较大,故只列出前6阶频率和前3阶振型。
3.1 无旋转预应力工况模态分析
有限元模型添加约束后,不添加旋转预应力,即处于静止工况,得到系统模态分析的结果,前6阶频率见表1所列,前3阶振型如图5所示。
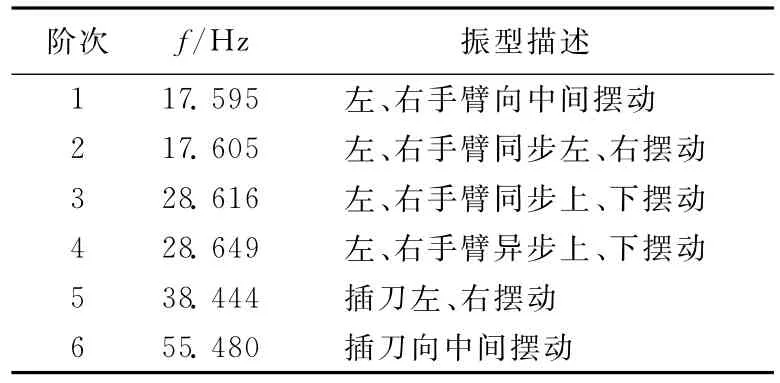
表1 无预应力工况前6阶频率

图5 无预应力工况前3阶振型
3.2 逆时针旋转预应力工况模态分析
上袋机械手机构进行套袋工作时,逆时针方向转动,角速度为3.140rad/s。有限元模型添加约束后,添加逆时针旋转角速度,解出系统模态分析的结果。前6阶频率见表2所列,前3阶振型如图6所示。
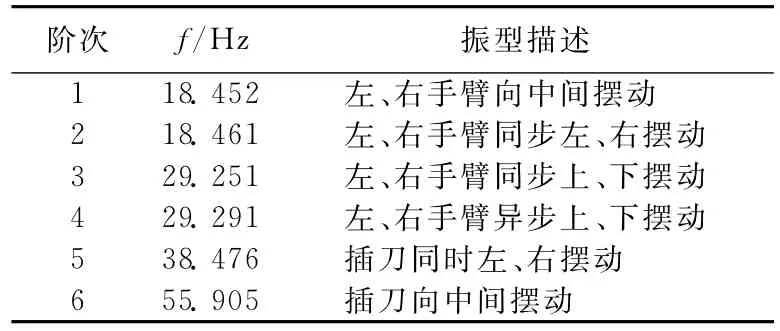
表2 逆时针转动工况前6阶频率
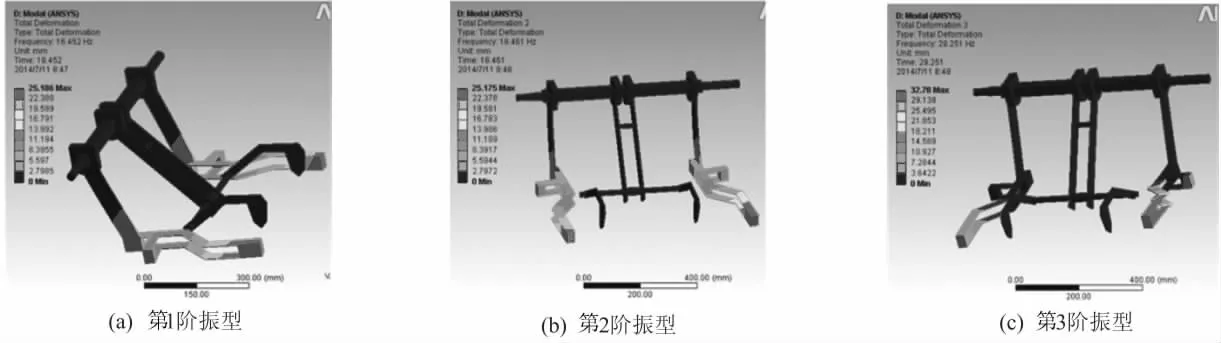
图6 逆时针转动工况前4阶振型
3.3 顺时针旋转预应力工况模态分析
上袋机械手完成套袋工作后返回取袋时,上袋机械手顺时针方向转动,角速度有高、低速2种工作状况,分别为3.140rad/s和2.512rad/s。求解出模态分析的结果,系统前6阶频率见表3所列。以角速度3.140rad/s顺时针转动工作时振型和逆时针3.140rad/s转动时振型一致,故不单独列出。低速前3阶振型如图7所示。
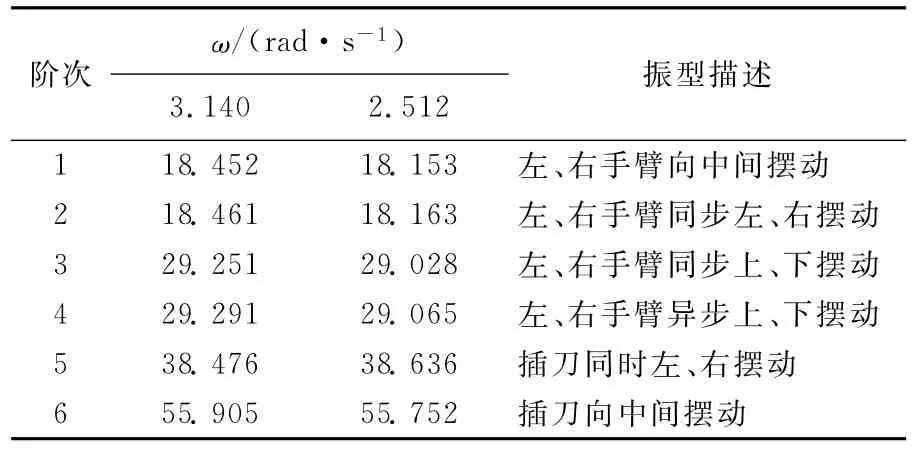
表3 顺时针转动工况不同角速度下前6阶频率 Hz

图7 顺时针转动工况前3阶振型
由以上模态分析可知,上袋机械手的固有频率较低,转速提高容易引起系统共振,需对结构进行优化;上袋机械手在旋转预应力工况下的固有频率比不存在旋转预应力工况下略有提高,且低阶频率变化更明显;上袋机械手在加载旋转预应力工况下,顺时针、逆时针转动角速度相同时,模态分析结果基本相同;逆时针转动工况下的模态分析结果表明,转速的提高会使得固有频率小幅提高。
4 机构优化与试验
根据动态特性和机构原理[7-9],对上袋机械手结构进行优化,上袋机械手左、右手臂大、小臂连接处增加1根固定轴以将左、右手臂固结为整体结构,手臂小臂上、下板之间增加加强筋结构,左、右手臂的板厚度由4mm增加到6mm,以提高上袋机械手的刚度。对优化后结构模型进行模态分析,根据上述结论可知,只需对其逆时针转动工况进行分析即可得到动态特性情况,前6阶频率见表4所列,前3阶振型如图8所示。
由优化前、后动态特性可得,系统低阶频率有明显提升,高阶频率有小幅提升;优化后的上袋机械手低阶主要阵型发生变化,第1阶振型由左、右手臂摆动变为插刀左、右摆动,套袋过程中,插刀主要是撑开袋口,对套袋位置不起决定性作用。
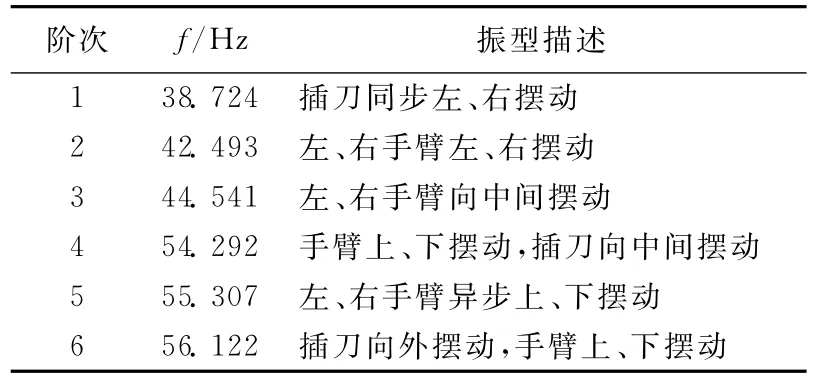
表4 优化后结构前6阶频率

图8 优化后结构前3阶振型
对改进前和改进后的上袋机械手机构,分别制作出物理样机,并对物理样机进行套袋试验研究,如图9所示。根据上袋效果和套袋位置的准确度判断套袋是否成功,对500个包装袋进行套袋试验,结果见表5所列。由表5可知,优化后的上袋机械手结构,大幅提高套袋成功率和稳定性,验证了优化结果的正确性。

图9 样机试验图
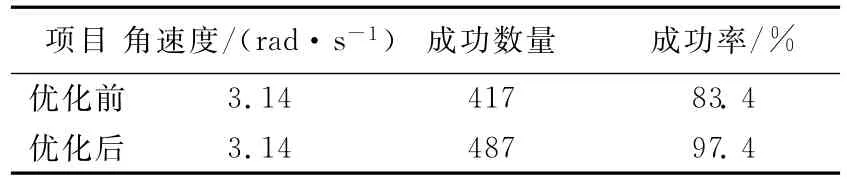
表5 优化前、后套袋结果比较
5 结束语
根据全自动套袋机的功能要求,模仿人工套袋动作,设计出上袋机械手机构。分析上袋机械手静止和高速旋转(即不存在和存在旋转预应力)2种工况下的动态特性,得到不同工况下的固有频率和振型。根据模态特性分析结果对结构进行优化设计,对优化前、后的上袋机械手进行仿真和试验比较,验证了优化的正确性。
[1] 吴国荣,何宗金.我国包装机械业现状及发展方向[J].包装与食品机械,2003,21(6):35-38.
[2] 傅志方,华宏星.模态分析理论与应用[M].上海:上海交通大学出版社,2000:1-56.
[3] 蔡力钢,马仕明,赵永胜,等.多约束状态下重载机械式主轴有限元建模及模态分析[J].机械工程学报,2012,48(3):165-173.
[4] 赵勇杰.高速轻型并联机械手动态设计理论与方法[D].天津:天津大学,2006.
[5] 罗筱英,唐进元.结构参数对砂轮主轴系统动态性能的影响[J].机械工程学报,2007,43(3):128-134.
[6] 谢远森,李意民,周忠宁,等.旋转预应力条件下的叶片流固耦合模态分析[J].噪声与振动控制,2009(4):34-37.
[7] 唐启敬,赵铁石,边 辉,等.复合肥取样机器人仿生设计[J].农业机械学报,2011,42(8):220-223.
[8] 尹安东,龚来智,王 欢,等.基于HyperWorks的电动汽车车架有限元分析[J].合肥工业大学学报:自燃科学版,2014,37(1):6-9,77.
[9] 崔 鹏,陈 志,张小超.苹果采摘机器人仿生机械手静力学分析与仿真[J].农业机械学报,2011,42(2):149-152.
猜你喜欢
力学与实践(2022年5期)2022-10-21
今日农业(2022年15期)2022-09-20
兰州交通大学学报(2022年2期)2022-04-26
特种结构(2019年2期)2019-08-19
中国果业信息(2019年1期)2019-01-05
制造技术与机床(2018年11期)2018-11-23
同济大学学报(自然科学版)(2018年1期)2018-02-08
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
商业文化(2017年26期)2017-03-20