
非晶丝MI效应磁场方位角测量系统
2015-02-28 17:37蒋峰
电子器件 2015年6期
蒋 峰
(江苏信息职业技术学院,江苏无锡 214153)
非晶态合金的高磁导率很早就引起了科技工作者们的浓厚兴趣,并开发出许多不同用途的磁传感器,有的已经投入了商品化生产[1-2]。例如1984年,用非晶态合金做磁芯的音频磁读头便已在TDK、SONY等公司投产,年产量在300万只以上。在这些器件中使用零磁致伸缩非晶态合金,是因为它们具有导磁率高,频带宽,耐磨,抗腐蚀等特点,但也只是用来做磁芯。
直到1992年日本科学家在非晶态合金中发现了磁阻抗MI(Magneto-impedance)效应,它们的应用发生了质的变化[3]。此时,非晶态合金已作为线路元件。磁阻抗是指当非晶材料上通以高频(10 kHz以上)电流时,在磁场作用下,材料两端的电压会发生巨大的变化,即其阻抗发生了巨大变化,且这种变化与材料的长短无关。这种阻抗变化可高达10%~100%/Oe(AMR的磁灵敏度为0.1%/Oe,GMR为1%/Oe)。正因为该现象非常灵敏,特别适合于对微弱磁场的检测。1993年,MI效应首次被提出用于发展新型灵敏、快响应微传感器。利用MI效应制成的传感器可用作计算机硬盘读头、汽车导航和用在电力配电网络、生物磁场传感、材料无损探伤等方面[4-6]。
本文设计并制作了基于CMOS IC电路的传感器电路。通过电路产生的尖脉冲电流对非晶丝进行激励,以此产生MI效应,从而达到检测磁场的目的。结合LabVIEW虚拟仪器开发软件,实现了地球磁场方位角的方便测量。
1 MI效应
1.1 正弦电流激励MI效应
如图1所示,当非晶丝被高频电流磁化,产生趋肤效应,其阻抗随外加平行于非晶丝轴向的磁场,而发生明显变化。

图1 实验原理图
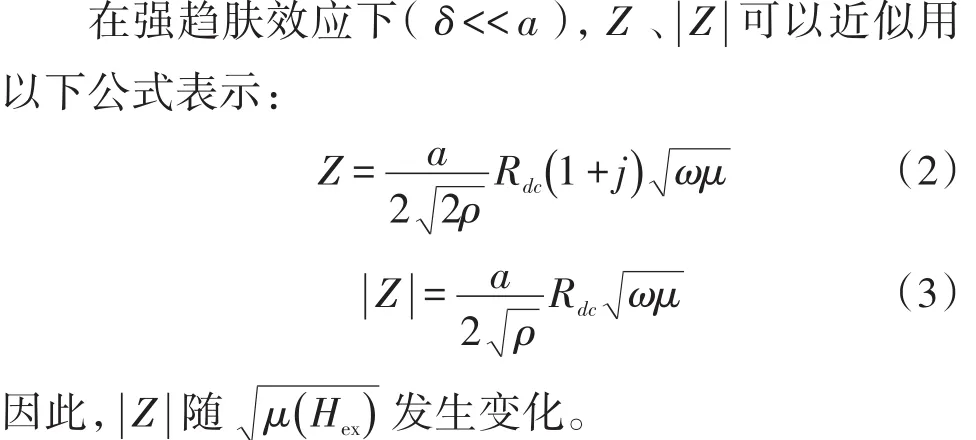
非晶丝阻抗以贝塞尔公式表示[7-8]:

其中a为直径,ρ为电阻率,μ为有效磁导率,Rdc为直流电阻,ω(f)为激流电流角频率(频率)。
可见,非晶丝在磁化圈产生的轴向交变磁场激励下,其有效磁导率对外加磁场十分敏感,从而使阻抗发生巨大变化。如图1所示,这是由于钴基非晶丝内芯具有轴向分布的磁畴结构而外芯具有圆周向磁畴分布,且呈右旋、左旋交替,钴基非晶材料具有较小的应力感生各向异性和小的饱和磁致伸缩系数,以及大的长径比共同决定的。正是这些因素使得钴基非晶丝材料具有高的交流有效磁导率,且易随外磁场作用而变化。因此用钴基非晶丝制成的磁场传感器具有很高的磁灵敏度。
1.2 尖脉冲电流激励MI效应
将尖脉冲信号近似为一个周期为T,幅度为A,宽度为2tr(tr为上升沿时间)的三角波信号,并进行傅立叶级数展开,可得:

在有限项内,增大(tr/T)和幅值A有利于提高各谐波分量的幅值,但(tr/T)的增大使各谐波幅值衰减比较快。若(tr/T)为一个较小的值,可保证在一个很宽的范围内,各谐波的幅值基本保持不变。尖脉冲电流可以产生类似于正弦交流电流的趋肤效应,在高频弱磁场下,励磁电流的频率越高,其MI效应就越明显。所以,利用含有丰富谐波分量的尖脉冲信号对非晶丝激励将提高MI效应。
假设忽略谐波分量中的高频部分,T=2tr,脉冲电流i()
t等效于具有频率f=2πT的直流偏置余弦电流:

具有10 ns周期时间的脉冲电流相当于100 MHz左右的直流偏置余弦交流电。因此,当非晶丝被由多谐振荡器产生的tr=5ns脉冲电流磁化时,可以得到超过100%/Oe的MI特性,这对设计灵敏的微型磁传感器非常有用。同时该电路功耗非常低,这对制造大规模MI集成电路(MIIC)传感器特别重要。此外还有一个优点是,当需要得到线性传感器时,可以通过施加直流偏置磁场,调节非晶材料的工作点。
2 传感器电路
2.1 工作原理
由CMOSIC构造的利用尖脉冲MI效应磁场传感器如图2所示。由于CMOSIC广泛应用于数字电路,因此传感器电路采用CMOSIC使生产MIIC变为可能。CMOS多谐振荡电路由两个CMOS非门、电阻和电容组成,所用的元件少、线路简单、调试方便。当振荡频率低于1 MHz时,电路的功耗低于1 mW,且工作稳定。利用多谐振荡电路产生方波信号,再通过RC微分电路,将方波信号转换成尖脉冲信号。尖脉冲宽度与时间常数τ1=RdCd有关,τ1越小,尖脉冲越尖,反之越宽。τ1必须远小于输入方波的宽度,否则就失去了波形变换的作用。但τ1太小,脉冲幅度也会相应的被削弱,这对非晶丝MI效应和后续的检波将产生不利的影响。所以,要在满足脉冲宽度条件下,取合适的Cd和Rd值,来获得最大脉冲幅度。图2中非门Q3是将微分电路输出波形整形并起隔离作用。
非晶丝在尖脉冲电流励磁下产生脉冲电压信号,该电压峰值随外加磁场的作用而变化,通过峰值检波电路检测出其峰值。峰值检波器时间常数τ2设计时注意,τ2太大输出信号幅值明显降低,检波效率变差,同时,对交变磁场检测时,信号快变部分的丢失变得严重。τ2太小检波前后的信号幅值的差异变小,信号中快变分量明显变好,但输出信号的平滑度变差。所以使用时根据输入信号的频率来调整R1、C1(R2、C2)。通过峰值检波电路被转换为直流电压,并放大为传感器两路输出电压Ex、Ey(Ex、Ey分别为两个垂直放置非晶丝轴向输出电压值)。

图2 传感器电路
2.2 闭环控制
正比于Eou(tEx、Ey)的反馈磁场Hf可以有效改进磁场检测:(1)实现线性检测,消除磁滞;(2)响应速度提高10倍以上;(3)提高温度稳定性。这些特点可通过图3方框图很好地解释,其中F为磁、电转换系数,A是电压放大倍数,B是由Eout到Hf的反向传递函数。当闭环增益|FAB|足够大时,Eout表示为:

其中,Nf和lc分别代表反馈线圈的圈数和长度,Rf为反馈电阻。式(6),F中的非线性因素(包括磁滞和温漂)被消除。
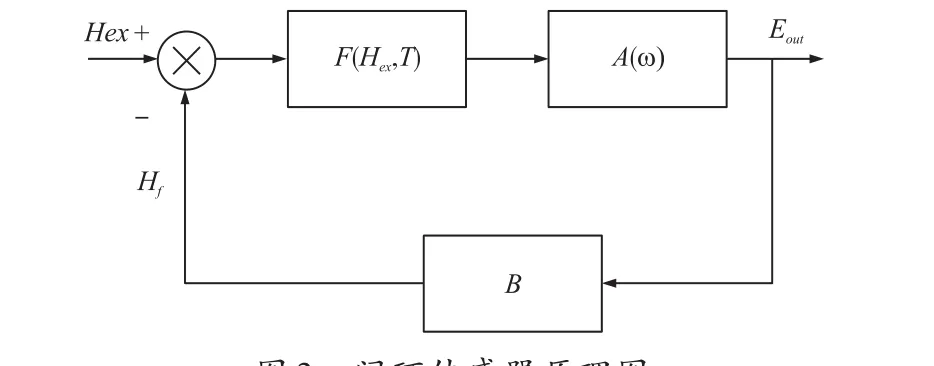
图3 闭环传感器原理图
此外,传感器的截止频率fc表示为

其中,f0为F或前向通道增益的截止频率,可见闭环传感器的响应速度得到明显提高。
3 磁场方位角检测
3.1 磁场方位角检测原理
地磁场是指地球和近地空间之间存在的磁场,只存在地球周围有限的区域内。常用磁倾角、磁偏角、地磁场水平强度(地磁场的水平分量)这3个要素来描述地磁场的大小和方向。若地磁场的大小和方向用磁场强度He表示,单位为高斯,He可分为3个分量:水平强度Heh,是He在水平面上的投影;磁偏角λ,是Heh与正北方向的夹角;磁倾角δ,是He对水平面的倾角。地磁场强度一般为0.5~0.6高斯,地磁场的水平分量指向磁北极。
目前关于磁场方位角的检测,国内东南大学MEMS教育部重点实验室利用Honeywell的HMC1022双轴磁阻传感器设计了一种小型电子罗盘,最大误差小于1°。南京航空航天大学以Honeywell的HMC2003三轴混合磁阻传感器和加速度计作为底仰角、横滚角测量传感器,构建一种小型磁航向测量系统,适用于车辆、无人机等航向角测量要求[9-10]。国外,美国KVH公司采用磁通门技术生产的C-I00DE电子罗盘,达到精度为0.5°,分辨率为0.1°。
类似于电子罗盘原理,本磁场方位角的检测,只需要考虑地磁场的水平分量Heh。令X轴和Y轴分别为双轴MI传感器的两个敏感方向,其工作原理是测得地磁场的水平分量在其正交的两测量轴的分量X和Y,假设X轴方向磁场分量为Hex,Y轴方向磁场分量为Hey,然后用公式α=arctan(Hey/Hex)算得方位角。本设计双轴MI传感器测量水平面内两个正交方向的磁场,为平面结构,故它只能水平放置才能保证精确度。
3.2 LabVIEW程序设计
LabVIEW是NI公司代表性产品,作为虚拟仪器开发平台软件,LabVIEW以其简单直观的图形编程方式、数量较多的仪器驱动程序、数据分析处理等功能,简化了开发过程,缩短开发时间,易于调试[11-12]。
本测量系统基于LabVIEW虚拟仪器开发环境,在PC上以图形化的功能界面来代替常规的传统仪器操作面板,通过连接外设,很方便地对测试数据实时地进行分析和处理。由于本系统要求能够进行在线实时的数据采集,故选用NI公司生产的PCI-6 024E多功能数据采集卡。基于PCI的总线技术具有模拟和数字输入、输出功能以及定时/计数功能,最高采样率为200 ksample/s,采样精度12位,完全满足磁场方位角的信号采集需要。
程序设计包括前面板和程序框图两部分。前面板由参数设置和功能按钮组成,后台有相应的程序模块与之对应。利用前面板的按钮或控件选择状态,运行程序后台执行其对应的状态。根据以上磁场方位角测量原理的分析,编写图4所示程序设计流程图以及图5所示程序框图。

图4 系统流程图
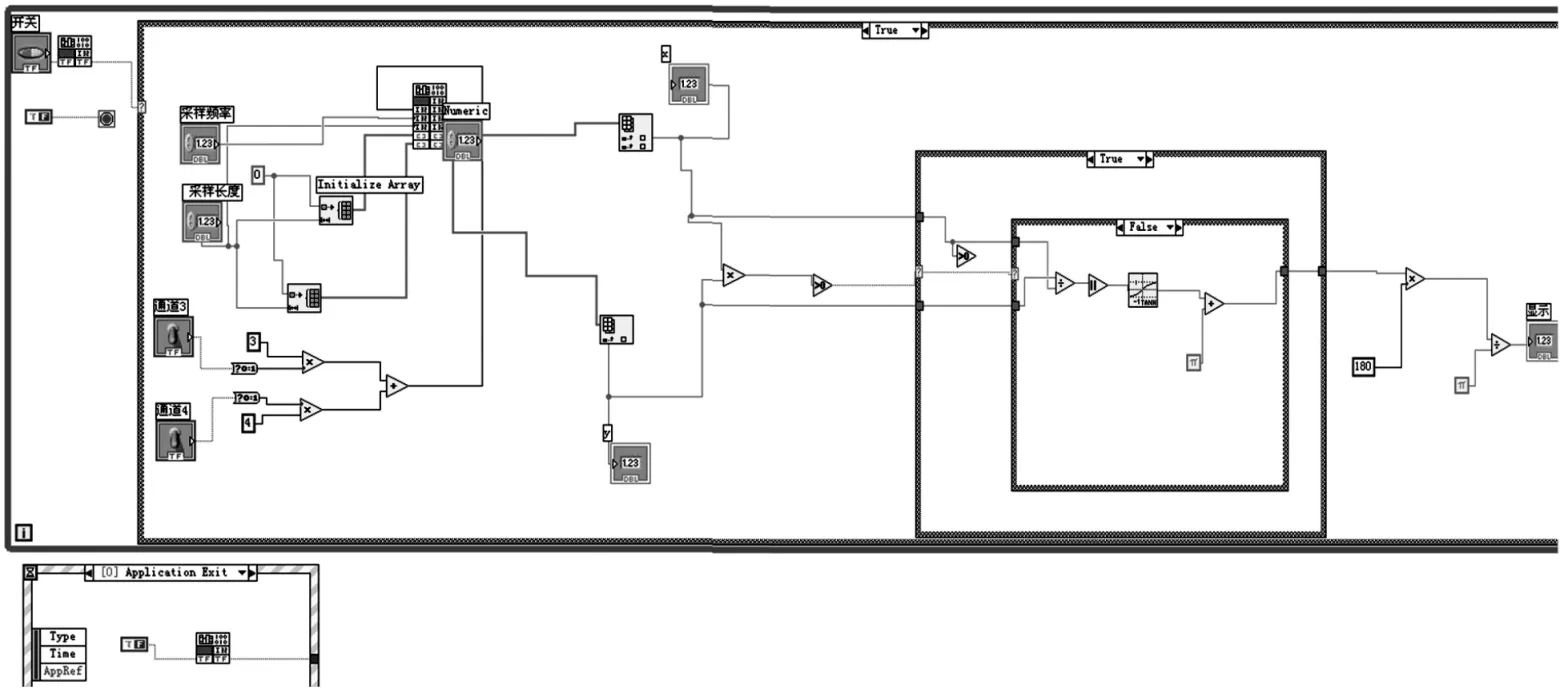
图5 程序框图
3.3 LabVIEW测量结果
将传感器固定在一个水平放置的回转工作台面上,转台主轴上装有精密圆光栅,通过数字显示装置读出角度值,分度精度可达±1"。数据采集卡装于台式PC机主板上。测量时,手动或自动方式旋转工作台,带动磁场传感器一起旋转。传感器转动时,改变了磁场与传感器的夹角,从而实现了磁场方位测量。系统运行时的前面板如图6所示,采样频率设为6 000 Hz,图6(a)、图6(b)、图6(c)分别为磁场与传感器的夹角在第一、三、四象限情况下的显示结果。
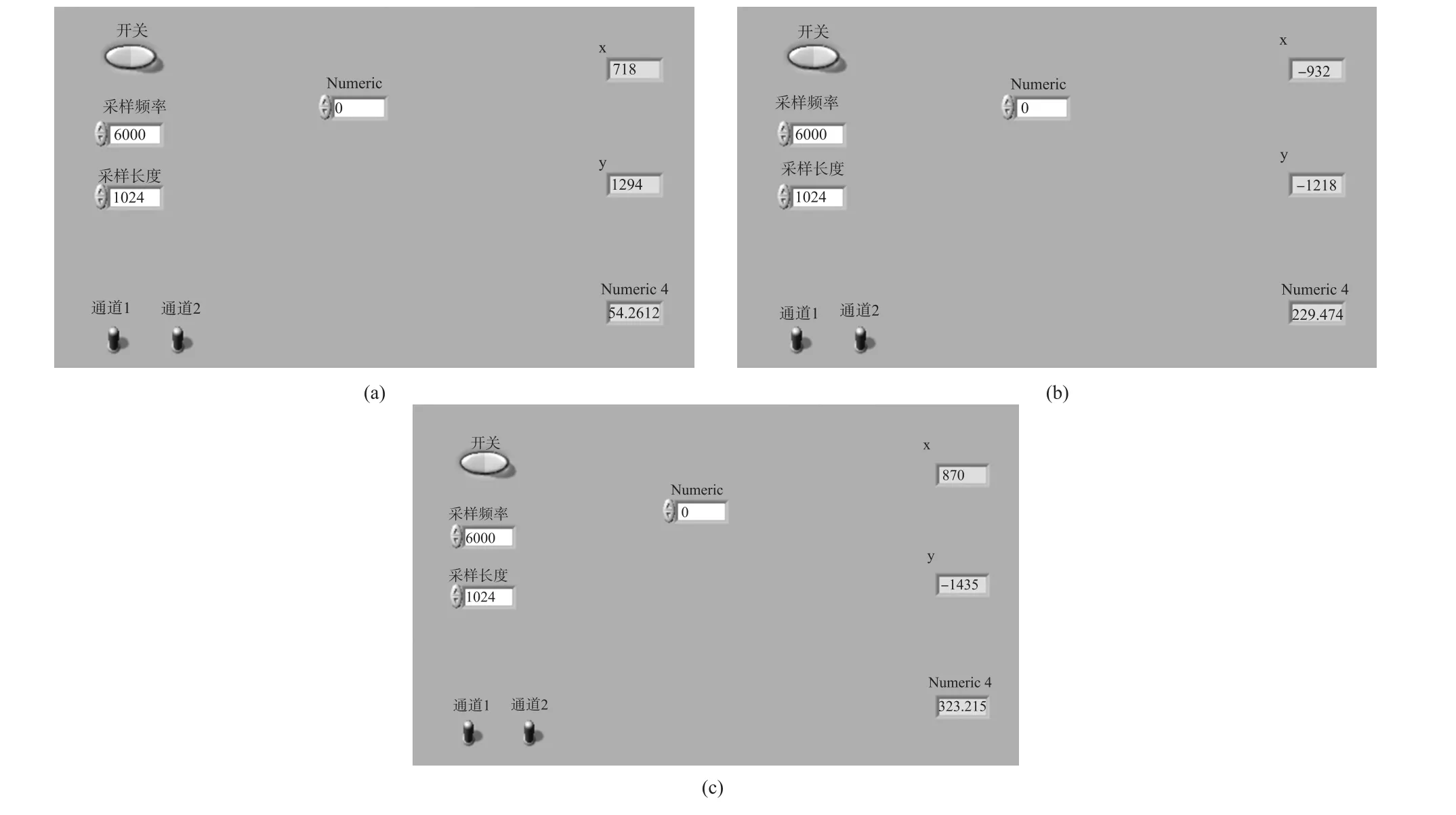
图6 方位角显示
本测量系统功能仍比较单一,编写并不很复杂。实际应用中,根据用户需求,可以集成更多的传感器,通过增添界面按钮和控件,使系统具备实时显示物体三维姿态和定位等功能。利用Lab⁃VIEW软件可以很方便地实现以上设想。
4 结束语
将MI传感器测量到的数据通过数据采集卡采集到计算机,再通过LabVIEW软件进行编程,向用户提供操作界面和显示界面,实现磁场方位角数据采集、传递、处理和显示。结果表明,系统结构简单、界面良好、易于操作、测量准确,可以满足磁场方位角检测的需要。
[1]鲍丙豪,蒋峰.单非晶丝磁芯双绕组新型磁传感器理论与实验研究[J].传感技术学报,2006,19(4):1001-1004.
[2]郭博,刘诗斌,杨尚林,等.用于低功耗微型磁通门的Co77Fe2.5Mn1.4Mo2.1Si13B4非晶薄膜研究[J].功能材料,2013,44(18):2719-2723.
[3]Mohri K,Kohzawa T,Kawashima K,et al.Magneto-inductive Ef⁃fect(MI effect)in Amorphous Wires[J].IEEE Trans Magn,1992,28(5):3150-3152.
[4]Kudo T,Tsuji N,Asada T,et al.Development of a Small and Wide-range Three-phase Current Sensor Using an MI Element[J].IEEE Trans Magn,2006,43:3062-3064.
[5]Honkura Y.Development of Amorphous Wire Type MI Sensor for Automobile Use[J].Journal of Magnetism and Magnetic Materi⁃als,2002,249:375-381.
[6]蒋峰.非晶带巨磁阻抗效应磁场测量仪[J].功能材料与器件学报,2014,20(5):164-169.
[7]Panina L V,Mohri K.Magneto-Impedance Effect in Amorphous Wires[J].Appl Phys Lett,1994,65:1189-1191.
[8]Mohri K,Bushida K,Noda M,et al.Magneto-Impedance Element[J].IEEE Trans Magn,1995,31:2455-2460.
[9]李怡达,张中平,秦明,等.基于磁阻传感器与微处理器的二维磁电子罗盘的设计[J].功能材料与器件学报,2008,14(2):557-560.
[10]杨新勇,黄圣国.磁航向测量系统误差修正方法研究[J].仪器仪表学报,2004,25(4):466-469.
[11]林静,林振宇,郑福仁.LabVIEW虚拟仪器程序设计入门到精通[M].北京:人民邮电出版社,2010.
[12]张华,郑宾,武晓栋.基于LabVIEW的温度测试系统[J].电子器件,2013,36(2):243-246.

蒋 峰(1981-),男,汉族,江苏盐城人,硕士,现为江苏信息职业技术学院机电工程系讲师,主要从事传感器以及检测技术研究,jf_415@126.com。
猜你喜欢
机械工程材料(2022年6期)2022-08-03
民族文汇(2022年14期)2022-05-10
空间科学学报(2020年4期)2020-04-22
兵器装备工程学报(2019年4期)2019-05-05
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
电镀与环保(2016年2期)2017-01-20
山东工业技术(2016年15期)2016-12-01
西南军医(2016年1期)2016-01-23
河南科技(2015年18期)2015-11-25
