
ADS-B与TCAS II数据融合算法研究
2015-02-27 07:43倪育德马宇申
计算机工程与应用 2015年22期
倪育德,马宇申,刘 萍
中国民航大学 天津市智能信号与图像处理重点实验室,天津 300300
1 引言
随着民航运输业的快速发展,空中交通的拥挤程度越来越高,飞机之间的冲突概率大大增加。交通警戒与防撞系统(TCAS)很好帮助了飞行员了解飞机周围的空域情况,提高了飞行的安全系数[1]。目前世界范围内使用的TCAS系统大多属于TCAS II系统,该系统采用“询问—应答”的方式进行交换信息,通过询问本机周围飞机的ATC应答机,运用自身计算机系统识别和显示潜在的碰撞威胁。但是它对冲突的预测只能依靠当前和历史位置、速度等信息,航路飞行的复杂性将导致其冲突预测能力大大降低,在实际应用中出现了虚警和不必要的告警等缺点。广播式自动相关监视(ADS-B)是基于全球导航卫星系统(GNSS)和空-空、地-空数据链通信的航空器运行监视技术,能够提供更精确和更实时的航空器位置、速度和航向等监视信息,但是ADS-B的监视信息的导航完好性类别(NIC)、监视完好性水平(SIL)和导航精度类别(NAC)均取决于GNSS的性能,如果单独使用ADS-B,一旦导航系统出现了问题,如有干扰或者其他因素引起的GNSS信息丢失,将导致监视功能的丧失,并且ADS-B作为一种全新的技术,其性能还需要大量的测试和评估来验证[2-3]。因此将ADS-B与TCAS II数据融合,发展组合监视,不但可以弥补单一传感器的不足,而且还可以充分利用所有能够得到的信息,以达到更高精度的飞机状态估计,提高防撞系统的性能。
2 ADS-B与TCAS II概述
ADS-B技术首先接收通过飞行管理器和其他机载传感器等系统生成的信息,然后将这些信息转换成数字码,该数字码结合了飞机的四维位置信息(经度、纬度、高度和时间)和其他附加信息(冲突告警信息、飞行员输入信息、航向和航线拐点等)以及飞机的识别信息和类别信息,此外还可能包含其他的信息,如航向、空速、风速、风向和飞机外界温度等,每秒更新一次,在适当的频率下通过数据链从飞机广播出来,位于可接收范围内的其他飞机和地面站就能接收到此数据链广播,将其信息在驾驶舱交通信息显示器(CDTI)上显示出来,可使飞行员获得可靠的高精度实时空中飞行动态信息,增强飞机的位置识别能力[4]。
TCAS II的功能可以分为探测、跟踪、潜在危险评估、交通告警(TA)、决断告警(RA)和相互间的避撞协调功能[5-7]。TCAS II通过上下两部天线发射询问脉冲,探测本机监视范围内出现的装有S模式和A/C模式应答机的飞机,接收入侵飞机的应答脉冲,计算接近飞机的相对位置、接近速率、高度变化率等信息,根据防撞算法,在本机和入侵飞机之间建立空中协调链路。
3 ADS-B与TCAS II数据预处理
ADS-B所广播的内容包括(1)标识号(ID):7个字母组成的呼号、24位地址组成的飞机编号以及飞机类别的标识类型(轻型、中型、重型等);(2)状态矢量:WGS-84坐标系下的飞机三维位置、三维速度、飞机转向标识和导航不确定度分类(NUC);(3)意图信息:紧急/优先状态(Emergency/Priority)、当前趋势信息(Current Intent)、航路改变点(Trajectory Change Point);(4)分类号:只有广播功能、具有避碰功能等;(5)其他:预留未来扩展使用。ADS-B报告每秒更新一次。
TCAS II系统向飞行员提供的是入侵机与本机位置的相对信息。在TCAS II计算机获得入侵飞机的高度、距离、航向等信息后,还需要知道本机的具体位置、高度、航向、高度变化率等信息,才能计算出入侵飞机的运动轨迹是否与本机的运动轨迹相冲突,进而确定发出何种警报类型。TCAS II系统的S模式应答机也是以每秒约一次的速率更新。
ADS-B和TCAS II数据预处理按如下方式进行。
(1)坐标变换:把ADS-B报告中的以WGS-84坐标系的数据和TCAS II中的相对位置数据转换成统一的融合坐标系—地心地固坐标系(X,Y,Z)。
(2)时间对齐:虽然理论上ADS-B报告和TCAS II数据的更新率都是1s,但是系统的延时将导致数据采集的不一致,所以在数据融合前必须将这些数据进行同步处理[8]。本文采用统一的时基法对ADS-B和TCAS II的时间同步,由于ADS-B传感器是以GNSS授时为基准,因此以ADS-B时基作为基准。把TCAS II在时间tj的观测数据同步到ADS-B的公共处理时间ti上,则有:

其中ZTCAS(ti)是TCAS II传感器在ti时刻的观测数据,v是飞机的速度,v×(ti-tj)为修正项。
(3)数据相关:数据相关的作用是判别不同时间空间的数据是否来自同一架飞机,ADS-B目标通过其位置报告中的国际民航组织(ICAO)ID进行数据关联,TCAS II目标也可以通过24位地址组成的飞机编号进行点迹与航迹的关联。这种代码映射关系的关联具有很高的准确性,同时,ADS-B和TCAS II在代码关联的基础上还可以利用位置数据关联算法进行验证,以进一步保证数据关联的准确性和可靠性,目前最常用的是最邻近数据关联法(NNDA)[9]。
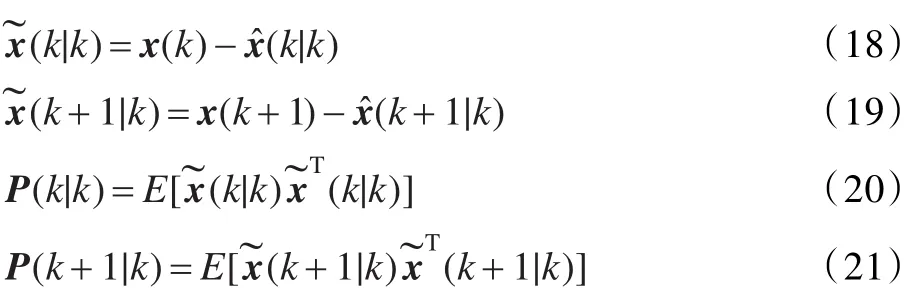
4 ADS-B与TCAS II数据融合
4.1 飞机状态空间模型
民航运输飞机都是在规定的高度层飞行的,所以假设飞机的运动是在二维平面上进行的。一架飞机以一定的航向沿直线做变速运动,把飞机的运动分解为东向运动和北向运动,则飞机的状态空间模型为:
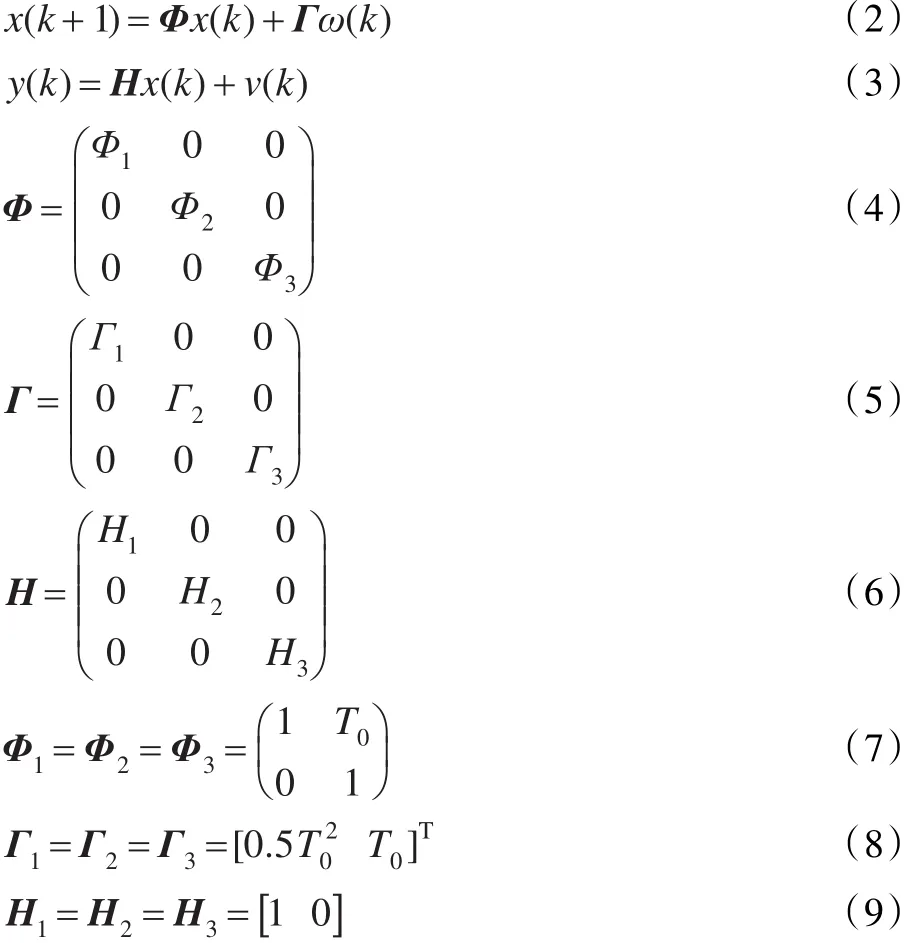
其中采样周期为T0,Φ,Γ,H分别是大小为6×6,6×3和3×6矩阵,称Φ状态转移阵,H为观测阵,且

其状态元素分别表示在采样时刻kT0处飞机的东向位置、东向速度、北向位置、北向速度、航向和航向变化率。

其元素分别表示为东向位置、北向位置和航向的观测信号。

其元素分别表示飞机的东向加速度、北向加速度、航向变化率,可以将其分别看作是零均值、方差为的白噪声,且其方差阵为:

其元素分别表示对飞机东向位置、北向位置和航向的观测噪声,可以将其分别看作是零均值、方差为的白噪声,且其方差阵

4.2 数据融合结构
针对民航飞机处理的目标数量比较大及处理速度实时性高的要求,本文采取分布式融合方法[10-11]。融合结构原理如图1所示。
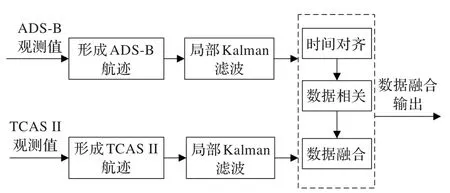
图1 分布式融合结构原理图
在该融合结构中,每个传感器都会根据各自观测到的信息产生独立的航迹,然后经过滤波处理,形成各自的本地局部航迹,ADS-B和TCAS II的本地局部航迹形成以后,被传送到融合中心,进行数据相关、时间对齐相关处理并进行融合,得到当前系统航迹的全局最优状态估计[12]。由于部分处理任务在传感器本地局部航迹中完成,所以中央处理器的工作量大大减少,这样就提高了数据处理的效率。
4.3 数据融合
将ADS-B和TCAS II看作两个监视子系统,利用Kalman滤波方法对两个子系统的数据进行滤波,得到局部状态估计信息,然后融合各传感器提供的局部状态估计信息得到高于局部状态估计精度的融合状态估计。Kalman滤波最优估计准则是线性最小方差估计,其算法如下:
动态条件下随机向量的最小均方误差估计为:

yk是状态x到k时刻为止的测量值集合,即

记滤波和预报估值误差及协方差为:
状态的一步预测为:

k+1时刻的状态估计为:

式中,K(k)为卡尔曼滤波增益;ε(k+1)为新息或测量残差,即
WSC-S型测色色差计 上海精科仪器有限公司;BSA224S型电子分析天平 赛多利斯科学仪器(北京)有限公司;BCD-215KJN型冰箱 青岛海尔股份有限公司;YXD-24B型高级电热食品烤箱 广州市豪宝厨具有限公司。

一步预测协方差为:

k+1时刻的协方差矩阵为:

飞机沿着预定航线作匀速直线运动,由于受到风速、湍流等因素影响,会出现某些机动,因此会产生一定的加速度,飞机状态模型为具有非线性,把这种加速度设为零均值的白噪声,通过卡尔曼滤波,不会导致数据发散。本文对飞机的位置和航向数据分别在东向和北向进行分解,降低了状态方程的维数,滤波的实时性得到了很大的提高。
ADS-B和TCAS II数据经过并行运算的Kalman滤波器的处理,分别得到各自局部最优状态估计ADS-B(k)和TCAS(k),接下来对两个局部最优状态进行融合。
本文采用的是在线性最小方差意义下的按标量加权最优信息融合准则和算法,其全局最优估计为
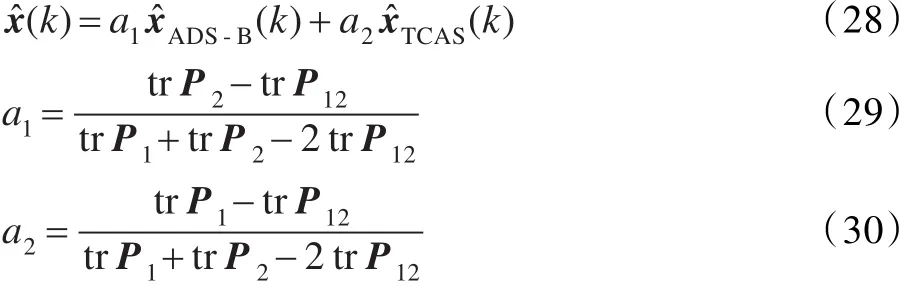
全局最优估计(k)满足:
(1)无偏,E=Ex,i=1,2;
(2)最优融合估计误差方差阵为:

且有trP≤trPi,i=1,2。
由此可知,通过对ADS-B和TCAS II数据估计值按标量加权,得到了目标状态的最优估计值。
5 数据融合仿真实验
假设 ADS-B数据采样周期为1.2 s(延迟0.2 s),TCAS II数据采样周期为1.1 s(延迟0.1 s),系统融合周期为1 s。初始化配置参数,飞机的初始状态为x=[10 000 230 10 000 80 π/4 0]T,飞 行 所 有 阶 段 垂 直 方向均无速度和加速度。设ADS-B和TCAS II系统噪声标准差分别为0.3和0.5,位置观测噪声标准差分别为50和60,航迹角观测噪声标准差都为0.02π,融合算法仿真结果如图2、图3和图4所示。
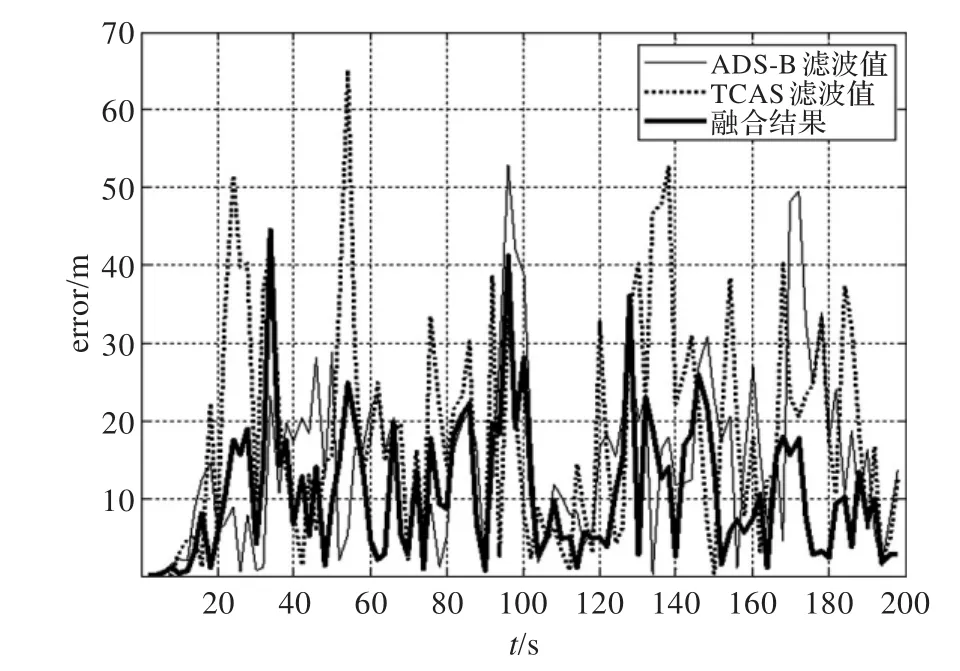
图2 位置估计误差图
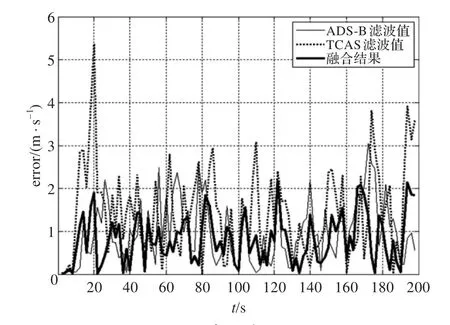
图3 速度估计误差图
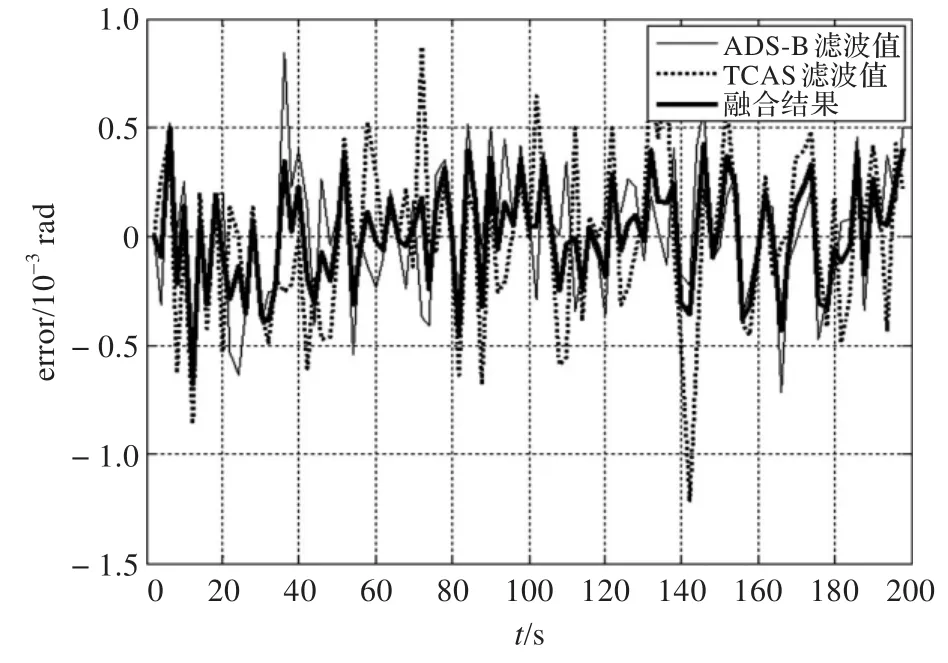
图4 航迹角估计误差图
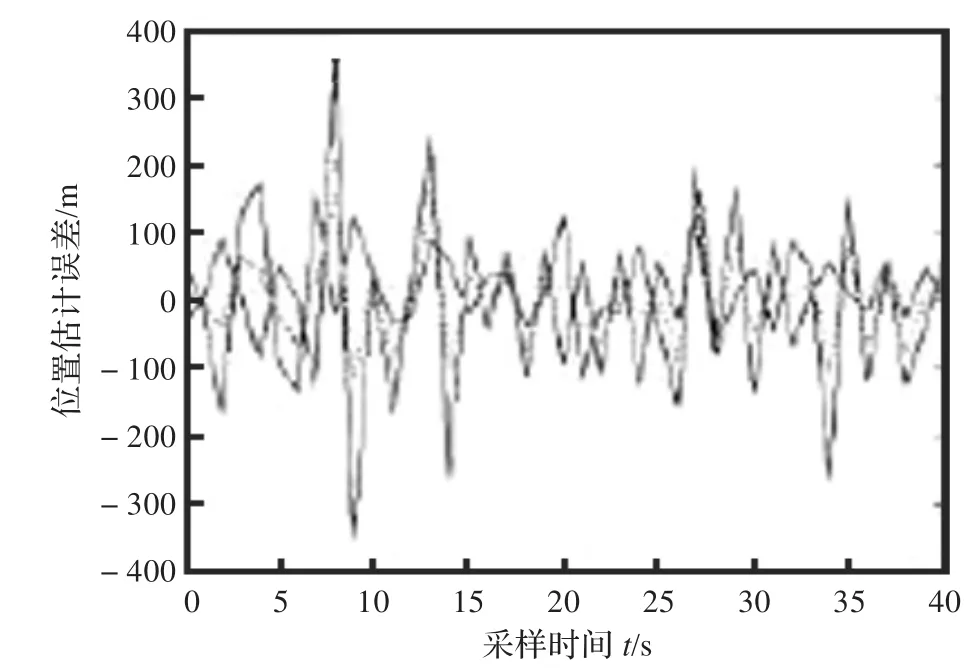
图5 目标位置估计误差
图2是ADS-B、TCAS II以及融合后的位置估计误差,图3是ADS-B、TCAS II以及融合后的速度估计误差,图4描述的是ADS-B、TCAS II以及融合后的航迹角估计误差。
从以上仿真结果可以看出,融合后的估计误差比任何一个传感器单独估计的误差都要小,并且融合后的误差变化更加平稳。其中位置融合误差在50 m 之内,速度融合误差在2.5 m/s之内,航迹角融合误差在0.5×10-3之内。根据RTCA/EUROCAE文件草案对ADS-B定义的航路和终端管制区域运行的最低要求,在航路5 nm间隔和终端区3 nm间隔,ADS-B监视的航路位置精度分别为558 m和186 m,并且TCAS II的位置精度要比ADS-B低得多,所以融合后的位置误差满足监视精度的要求[13]。
根据参考文献[14]的介绍,其根据最小方差原则,采用加权平均的方法,得到目标位置最优融合估计,图5中实线分别表示ADS-B与TCAS II的位置估计误差,虚线表示融合后的估计误差,可知其组合监视融合位置误差在±150 m内满足监视精度要求。对于速度质量指标(NACV),其编码由水平速度误差决定,融合后的误差满足NACV>2的要求[15]。对于航迹角,融合后的误差标准差为0,达到了很理想的效果。
由此可见,通过ADS-B与TCAS II数据的融合,得到了更高精度的数据,提高了飞机状态估计水平,有效增强了防撞系统的性能。
6 结束语
本文针对TCAS II在实际应用过程中暴露出的虚警和不必要告警,以及其境况感知单一等问题,给出了ADS-B与TCAS II组合监视方法,对飞机状态的基本数据编组如位置、速度和航向进行了有效的融合,相应的仿真实验也验证了算法的有效性。ADS-B技术的异军突起,更好地弥补了TCAS的缺点,未来ADS-B与TCAS将会更多的结合起来,为增强飞机境况感知能力开辟了广阔的前景,进而提高了TCAS的性能,增强了飞机之间的防撞能力。
[1]Yepes J L,Hwang I,Rotea M.New algorithms for aircraft intent inference and trajectory prediction[J].Journal of Guidance,Control and Dynamics Conference,2007,30(2).
[2]何桂萍.ADS-B与雷达组合监视数据融合方法研究[D].广汉:中国民用航空飞行学院,2011.
[3]吴江.多雷达和ADS数据融合研究和应用[D].成都:四川大学,2004.
[4]黄晋.广播式自动相关监视(ADS-B)在中国民航飞行学院的应用研究[D].成都:西南交通大学,2008.
[5]EngSeah C,Aligawesa A,Hwang I.Algorithm for conformance monitoring in air traffic control[J].Journal of Guidance,Control and Dynamics Conference,2010,33(2):500-509.
[6]Reynolds T G,Hansman R J.Conformance monitoring approaches in current and future air traffic control environments[C]//21st Digital Avionics Systems Conference,2002.
[7]何小薇.空中交通警戒与防撞系统的主要技术特点[J].中国民航飞行学院学报,2001(3):40-42.
[8]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2009.
[9]Baud O,Honore N,Taupin O.Radar/ADS-B data fusion architecture for experimentation purpose[C]//IEEE 2006 9th International Conference on Information Fusion,2006.
[10]Vitale A,Corraro F,Bernard M,et al.Unscented Kalman Filtering for reentry vehicle identification in the transonic regime[J].Journal of Aircraft,2009,46(5).
[11]邓自立.信息融合滤波理论及其应用[M].哈尔滨:哈尔滨工业大学出版社,2007.
[12]蒋希帅.雷达目标跟踪滤波算法的研究[D].大连:大连海事大学,2008.
[13]李自俊.一种基于ADS-B、WAM和雷达的组合监视方法及其架构[J].中国雷达,2008(3):48-52.
[14]何桂萍,徐亚军.基于TCAS II和ADS-B的组合监视防撞系统研究[J].电光与控制,2011(4):61-64.
[15]王璐璐.ADS-B导航数据源可用性研究[D].天津:中国民航大学,2011.
猜你喜欢
环球时报(2022-05-30)2022-05-30
新世纪智能(高一语文)(2021年3期)2021-07-16
青年歌声(2019年12期)2019-12-17
当代陕西(2019年11期)2019-06-24
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年7期)2017-11-24
作文周刊·小学一年级版(2017年9期)2017-06-20
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16
小学生导刊(低年级)(2016年8期)2016-09-24
