
基于随机集的多主用户多维信息感知算法研究
2015-02-24 07:07杜利平何琴李飞周贤伟
电波科学学报 2015年6期
杜利平 何琴 李飞 周贤伟
(北京科技大学计算机与通信工程学院,北京 100083)
基于随机集的多主用户多维信息感知算法研究
杜利平何琴李飞周贤伟
(北京科技大学计算机与通信工程学院,北京 100083)
摘要移动认知网络多主用户(Primary User, PU)信号检测问题是当前认知无线电领域面临的主要问题之一.文中提出将随机集(Random Sets, RS)引入移动认知网络的频谱感知过程中,构建多主用户运动模型及观测模型,通过粒子概率假设密度滤波(Particle Probability Hypothesis Density Filter, P-PHDF)算法实现对主用户数量及主用户状态(位置、速度、使用频率、信号接收角度)的实时检测.较传统感知方法,基于随机集的频谱感知方法不仅能准确跟踪检测活跃主用户的数目,同时还能跟踪检测出主用户的具体位置、使用频率及信号接收角度等信息.仿真结果表明,在移动环境下文中提出的多主用户实时感知方法的检测性能良好,并且能有效地抵抗杂波等的干扰,实现了多维移动认知网络中对检测区域内主用户数量及状态的实时检测跟踪.
关键词多维频谱感知;多主用户;随机集;粒子概率假设密度滤波
资助项目: 国家自然科学基金(61102060)
联系人: 杜利平 E-mail:lpdu200@163.com
引言
随着通信技术的发展,无线移动通信已进入我们日常生活的每个角落.随之而来的频谱资源紧缺问题也变得越来越突出,成为限制无线通信发展的一个“瓶颈”[1].认知无线电技术为无线通信的发展提供了一个新的解决方案,该技术能够提高频谱利用率,充分有效地利用资源. 频谱感知技术作为实现认知无线电网络的前提和关键,是当前认知无线电领域研究的热点问题.而移动认知网络多主用户信息检测是当前认知无线电领域面临的主要问题之一[2].
然而随着认知无线电技术的不断发展,仅仅检测出主用户的存在与否的传统频谱感知技术已经远远不能满足日渐增多的要求[3].在移动通信系统中,有时我们不仅要求认知用户检测出检测区域内主用户的数量、准确定位主用户的位置,还需要对主用户的相关状态信息,比如使用频率及接收角度等信息进行准确估计.
对于移动认知无线电网络来讲,系统中主用户的位置和数量等信息随时变化.传统的频谱感知方法大多仅能检测主用户信号是否存在,感知时间长,因此不适用于移动认知网络.为了给认知用户提供更多的主用户信息,更好地利用空闲频段,移动认知无线系统往往需要检测系统中主用户的数量及各主用户的多维状态等信息主用户的多维状态,如主用户的位置、使用频率、信号接收角度等有助于实现最大程度的频谱复用,提高频谱资源利用率.通过感知主用户的位置信息,可以在重复利用频率时,有效避免对主用户的干扰.而通过感知主用户接收信号的角度,可以实现在不同角度上对频率的复用.另外,由于移动网络中随时变化的个数和信息,要求认知用户能实时追踪各主用户的信息变化,更新检测区域内各主用户的信息.
基于上述考虑,本文提出了基于随机集的多主用户多维频谱感知技术.该方法以随机集的粒子概率假设密度滤波检测算法为基础,通过一组带权值的随机样本来近似信号后验强度函数,并通过聚类运算得到最终信号状态估计的结果,分析出系统中检测区域内主用户的个数及各主用户的状态[4].通过MATLAB软件平台进行仿真实验,结果表明在移动环境下本文应用的多主用户实时感知方法的检测性能良好,并且能有效地抵抗杂波等的干扰,实现了移动认知网络中对多主用户多维信息的实时检测跟踪.
1基于随机集的信号检测理论基础
近些年,研究学者开始将随机集理论运用到多信号检测的过程中,尝试利用随机集理论来解决检测区域内信号数目未知或者信号状态时变的多信号检测问题[5].当杂波强度较大时,传统的数据关联算法很难完成目标检测任务,而随机集理论没有数据关联的过程,即使检测环境复杂,跟踪目标的能力也不会丧失,而且计算复杂度低,易于工程实现.
以随机集理论为依据的多目标多传感器模型,可以将多传感器多目标检测、多传感器单目标检测、单传感器多目标检测和单传感器单目标检测等目标检测统一在随机集Bayes框架下解决[6],即把当前时刻的信号状态值集合看作为一个状态随机集变量,而把当前时刻对信号状态的观测集合作为一个观测随机集变量来处理.
基于Bayes估计理论,随机集的Bayes滤波可以描述为:
pk|k-1(Xk|Z1∶k-1)=∫fk|k-1(Xk|Xk-1)pk-1
(Xk-1|Z1∶k-1)μ(dXk-1),
(1)
pk(Xk|Z1∶k)=gk(Zk|Xk)pk|k-1(Xk|Z1∶k-1)/
∫gk(Zk|Xk)pk|k-1
(Xk|Z1∶k-1)μ(dXk).
(2)
式中:pk|k-1(·|·)表示全体多目标联合先验概率密度;fk|k-1(·|·)表示全体多目标的状态转移概率密度;gk(·|·)代表多目标联合似然函数;pk(·|·)为多目标联合后验概率密度;μ代表某空间的参考测度[7-8].Zk表示的是k时刻为止所有测量值构成的集合,Zk={z1,z2,…,zk},其中zk表示k时刻系统的观测值,Xk表示的是k时刻及k时刻之前的状态值集合,Xk={x1,x2,…,xk},其中xk描述k时刻系统的状态.
在Bayes滤波算法中,概率假设密度滤波(ProbabilityHypothesisDensityFilter,PHDF)最具代表性,且其收敛性已经得到验证.该方法在整个处理过程中以集合为单位,实现了将复杂的多主用户目标状态空间的运算转换到单主用户目标状态空间运算,有效地避免了数据关联,并且在保证检测精度的前提下提高了系统的实时性检测功能.但是,PHDF算法计算过程包含复杂的积分运算,存在没有解析解和“维数灾”等问题.PHD滤波的数值实现方法包括基于粒子实现的PHD滤波(ParticleProbabilityHypothesisDensityFilter,P-PHDF)和基于高斯混合实现的PHD滤波(GaussianMixtureProbabilityHypothesisDensityFilter,GM-PHDF)以及相关改进算法.相比较GM-PHDF,P-PHDF虽然复杂度相对较高,但是不需要先验知识,适用于任何非线性、非高斯系统,应用范围更广.粒子滤波是基于贝叶斯理论的蒙特卡罗方法,它利用若干个离散的点来逼近后验概率分布,从而实现参数估计[9].在本文中,我们采用P-PHDF算法从时间域、空间域、频率域对主用户状态进行检测,有效地将三维状态统一到一个检测算法中,完成多元移动认知网络中主用户数量、主用户位置、主用户使用频率及主用户信号接收角度等状态信息的检测估计.
2基于粒子滤波的PHDF多主用户多维感知算法
下面我们通过介绍基于粒子滤波的概率假设密度滤波,将粒子滤波与随机集理论结合起来实现多主用户的多维感知.
多主用户多维感知基本原理框图如图1所示.
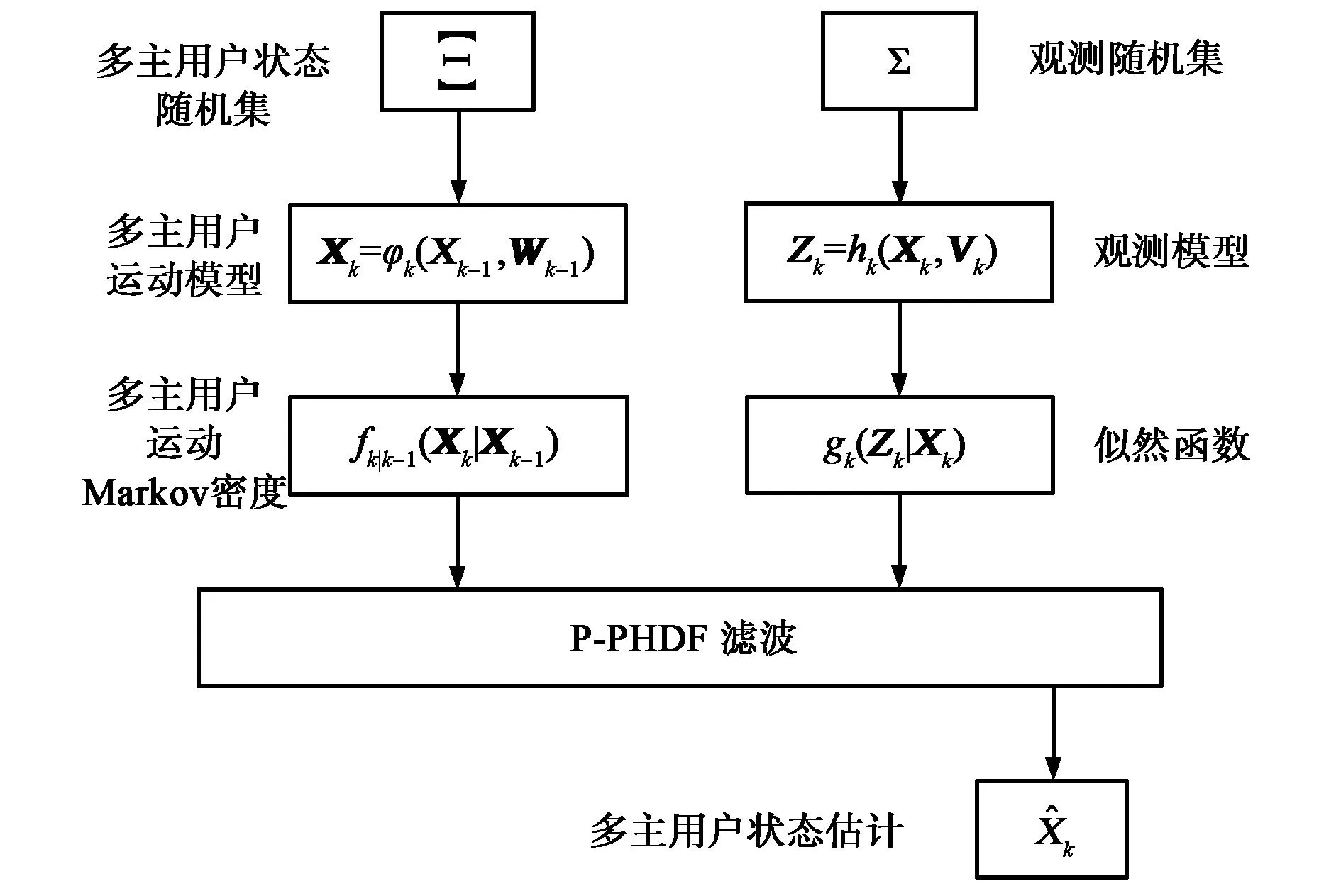
图1 基于P-PHDF算法的信号检测基本原理框图
根据图1可以看出,信号按照一定的动态特性(动态方程)在检测区域内运动,其运动状态经过传感器的测量(观测方程)后形成测量值,并将得到的主用户运动的状态值和传感器观测值以随机集的形式表示,以集合为参数计算得到多主用户运动Markov密度(状态转移概率密度)和似然函数,进而参与到粒子概率假设密度滤波主用户状态的估计过程中.
为了描述信号的检测过程,我们采用如下的信号动态方程和观测方程来描述信号运动及传感器的测量行为:
xk=φk(xk-1,wk-1)(运动方程);
(3)
zk=hk(xk,υk)(观测方程).
(4)
式中:k∈N表示时间指标; xk描述k时刻系统的状态,包括信号的各动态参数,如速度、位置等;φk(·)表示从k-1时刻到k时刻系统状态转移函数;zk表示k时刻对于系统的观测值;hk(·)为观测函数;φk(·)和hk(·)不受线性和非线性的限制,既可以为线性也可以为非线性; wk-1和υk分别表示系统过程噪声和观测噪声,且其概率密度分布一般情况下是已知的,可以为非高斯白噪声也可以是高斯白噪声.
2.1 P-PHDF具体实现
P-PHD滤波以粒子滤波的形式来实现后验概率密度函数的递推.算法流程如图2所示.
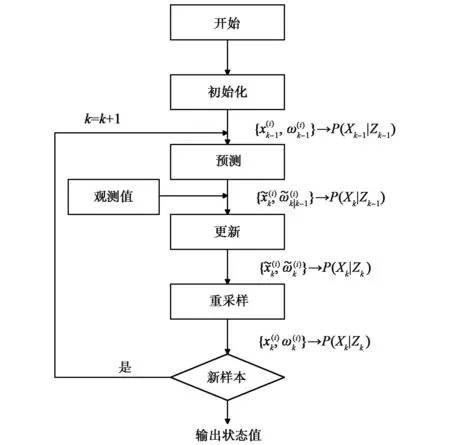
图2 P-PHDF算法流程图
2.1.1初始
初始粒子采样有两种方法:一种是假设信号均匀分布在检测区域S内,根据信号的先验分布密度进行采样;另一种方法是根据观测值确定信号数及计算信号状态,然后进行抽样.本算法所采用的是后者.由于抽样所导致的信号数目和信号状态的偏差,需要在下一步得到新的观测值后进行校正.
2.1.2预测

(5)

(6)
式(5)、(6)中: τk(·,·)=ek|k-1(·)fk|k-1(·|·)+bk|k-1(·|·),ek|k-1(·)表示主用户信号k-1时刻存在,k时刻仍然存在的存活概率,fk|k-1(·|·)表示由k-1时刻到k时刻的状态转移概率密度; qk(·)和pk(·)都表示建议采样密度; bk(·)则表示新生成的信号的概率假设密度PHD.
在P-PHDF的过程中,有一个非常重要的环节,即重要性采样函数q(·)和p(·)的选择,一般选择重要性函数的方法是令q(·)=fk|k-1(·),p(·)=bt(·). 为了简化,我们不考虑主用户信号的衍生情况,即bk|k-1(·)=0.因此,可以将式(5)、式(6)简化为:
(7)
(8)
2.1.3更新
粒子权值更新公式为
(9)

2.1.4重采样
针对粒子滤波迭代过程中的粒子退化现象,需要采用重采样方法来剔除低权值粒子和复制高权值粒子,以增加粒子的有效性.重采样过程是粒子滤波算法中相对独立的部分,但它的优劣直接影响检测结果的准确度和实时性.在重采样过程中首先需要对每个粒子的权值进行归一化处理,即
(10)

在概率假设密度滤波中,检测区域内的信号个数是通过对该区域内的概率假设密度进行积分运算来求取[10].在本文中,我们采取的是粒子滤波数值方法,将积分形式表示为粒子权重的离散求和.需要注意的是,在此粒子的更新权值之和等于估计的信号数,不再等于 1,即
(11)
2.1.5状态值的输出

2.2 Wasserstein距离评估指标

(12)
2.3 算法复杂度分析
由于PHD滤波借助了粒子滤波来实现检测功能,所以计算量会增大,这是不可避免的,当然,仿真时间会更长一些.但是,该算法同时避开了传统方法的数据关联,因此又节约了一部分数据关联的时间.在本文提出的跟踪算法里,重采样算法是粒子滤波中最重要和独立的部分,其时间复杂度为O(N).另外,我们也可以适当的减少粒子数目,降低计算复杂度,使得算法的实时性得到了保证.
3实验仿真分析
3.1 跟踪模型及参数选取
为了验证P-PHDF的有效性,本文利用MATLAB进行仿真实验.在仿真实验前,首先建立信号跟踪模型,包括信号运动模型和信号观测模型.
在信号跟踪模型中,主用户信号的运动方程为xk=Fk|k-1xk|k-1+wk-1,信号观测方程为zk=Hkxk+vk.式中: xk为k时刻信号状态矢量; zk为传感器在k时刻对信号的量测信息; Fk|k-1为状态转移矩阵; Hk为观测矩阵; 过程噪声wk和观测噪声vk分别为零均值带有协方差矩阵Qk-1和Rk的高斯白噪声,二者之间相互独立.
主用户的运动模型选用匀速直线模型,其方程为xk=F×xk-1+sqrt(Q)×randn8×1.状态转移矩阵F和状态噪声协方差矩阵Q分别为:
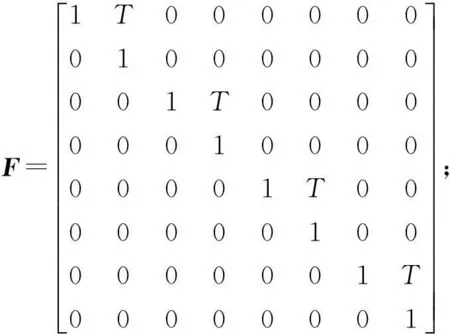
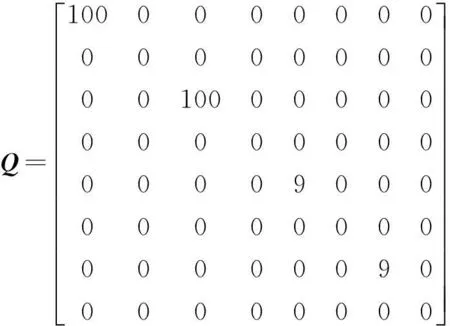
式中,T=1为采样周期.
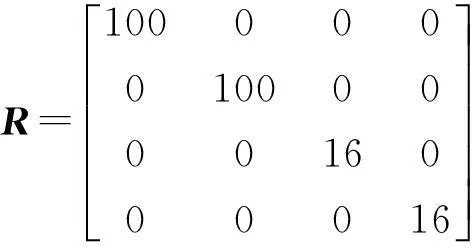
跟踪系统的观测方程为zk=H×xk+sqrt(R)×randn4×1,其中,观测矩阵H及观测噪声R分别如下:

为简单起见,本仿真中假设总共有2个主用户信号且两主用户信号处于检测区域内不同位置,传感器为区域内的认知用户.
检测区域内主用户目标1初始状态为[2 5001002 500-2001 88010305]T,主用户目标2初始状态为[-2 500200-2 500-801 9403806]T. 对于每个可能的信号固定分配ρ=1 000个粒子,每个采样间隔加入1 000个新生粒子,以表征可能产生的新信号,新生粒子符合均值为rm,方差为rp的正态分布N(·; rm,rp),其中rm=[1 0002001 0001401 8808254]T,rp=diag([10025100254149]T).杂波均匀地分布在整个检测区域S内,且杂波个数服从均值为λ=5的泊松分布,则对于场景区域[-10 000,10 000] m×[-10 000,10 000] m,杂波的PHD为κk(z)=λ/20 0002.
假设仿真长度为40s,主用户1出现的时刻为k=1~27s,主用户2出现的时刻为k=10~40s.
3.2 仿真结果及分析
图3~5分别描述了主用户信号的真实状态与量测信息的对比输出.从图3可以看出主用户信号在x和y方向随时间变化的真实运动轨迹与位置量测信息基本一致,观测值能够正确表示出主用户信号运动的真实轨迹,位置量测信息的可靠性可以得到保证.
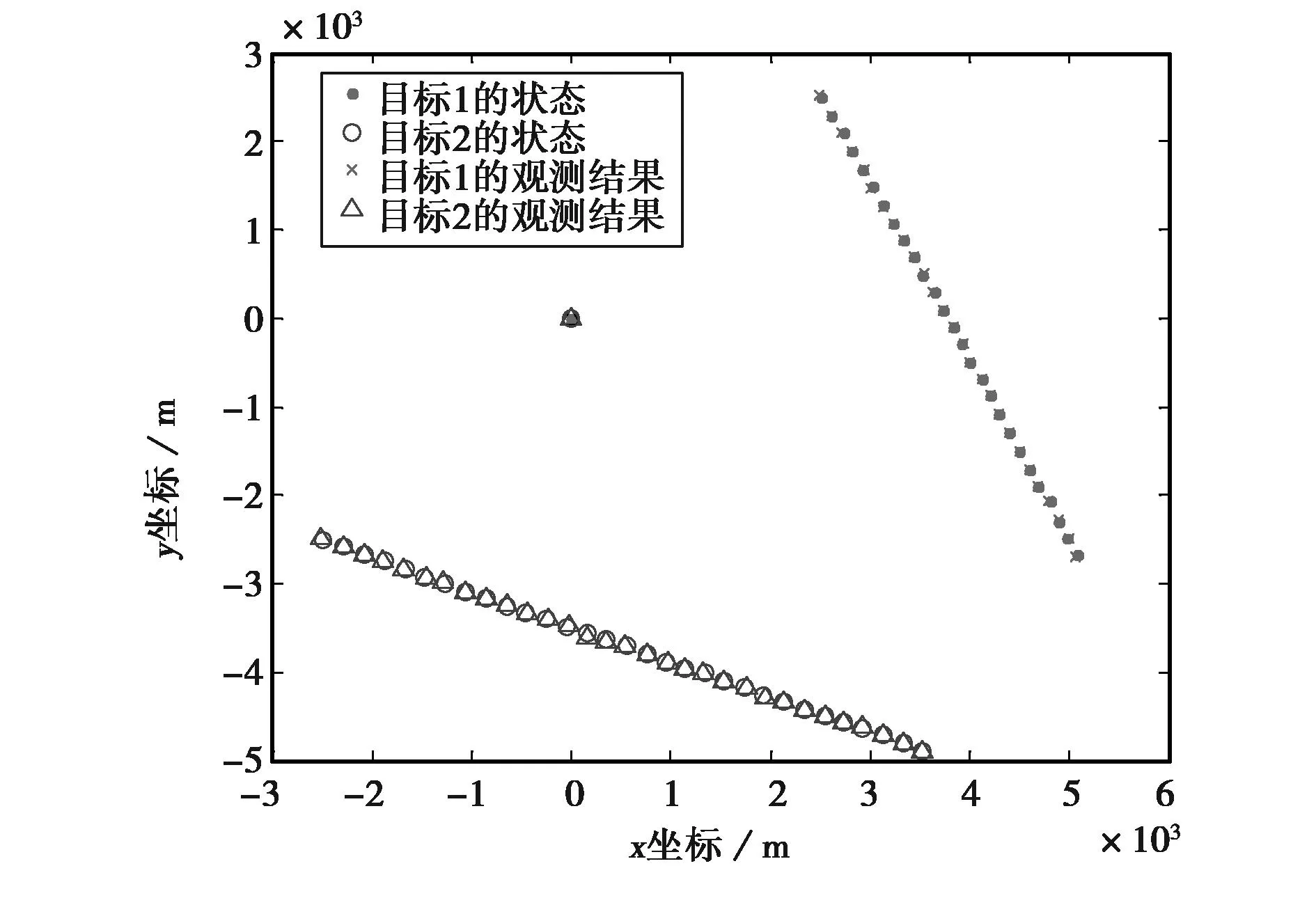
图3 主用户位置的真实值与测量值的对比图
从图4可以看出随着时间的推移,观测的主用户信号频率与信号真实频率的对比,频率变化的轨迹与观测输出结果基本一致,其频率输出同样可以描述出频率变化的真实情况.
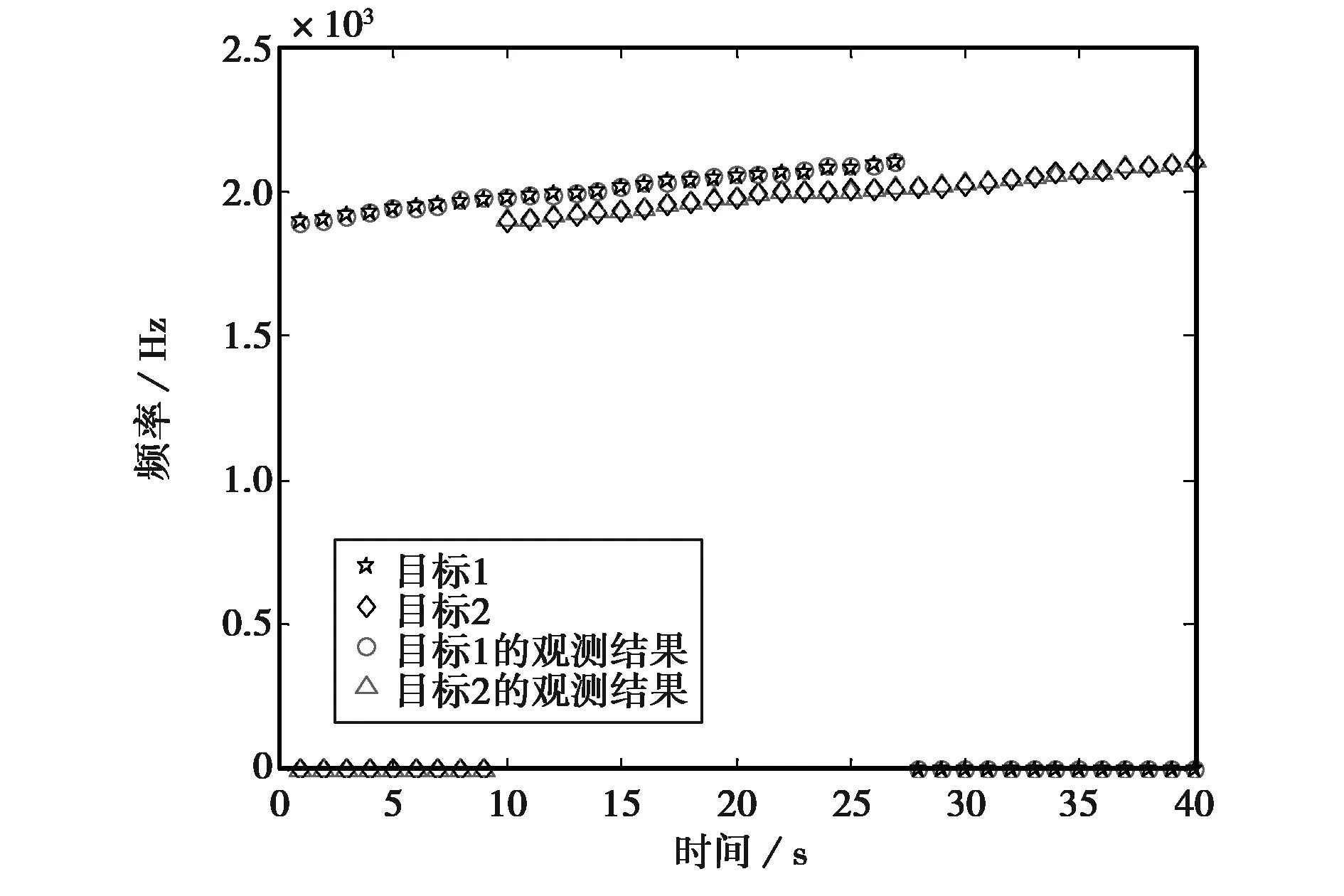
图4 主用户信号频率的真实值与测量值的对比图
图5描述了根据运动方程运动,位置不断改变的两主用户信号接收角度的测量值与真实值的对比.根据图示,可以看出我们所获取到的量测信息与主用户信号的真实状态信息基本吻合,为接下来各时刻的仿真实验提供了可靠的量测信息,保证了实验数据的准确性和可靠性.
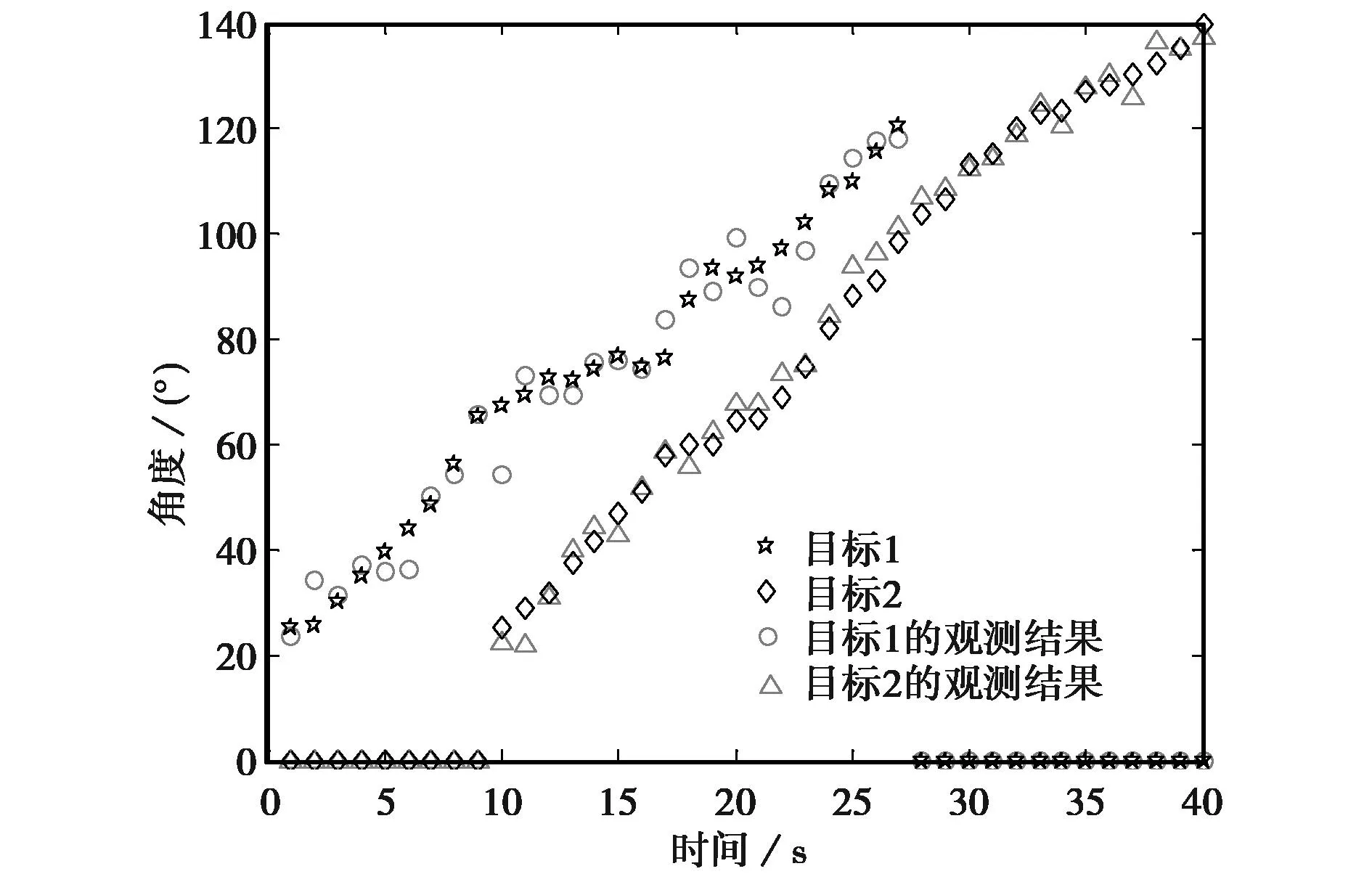
图5 主用户信号接收角度的真实值与测量值对比图
图6给出了检测区域内主用户数量的估计值.从图中可以看出,P-PHDF算法的输出结果与主用户数量的真实值结果一致.结果表明该算法能够准确检测出各时段内检测区域内主用户信号的数量,符合主用户在检测区域内的存在状态.
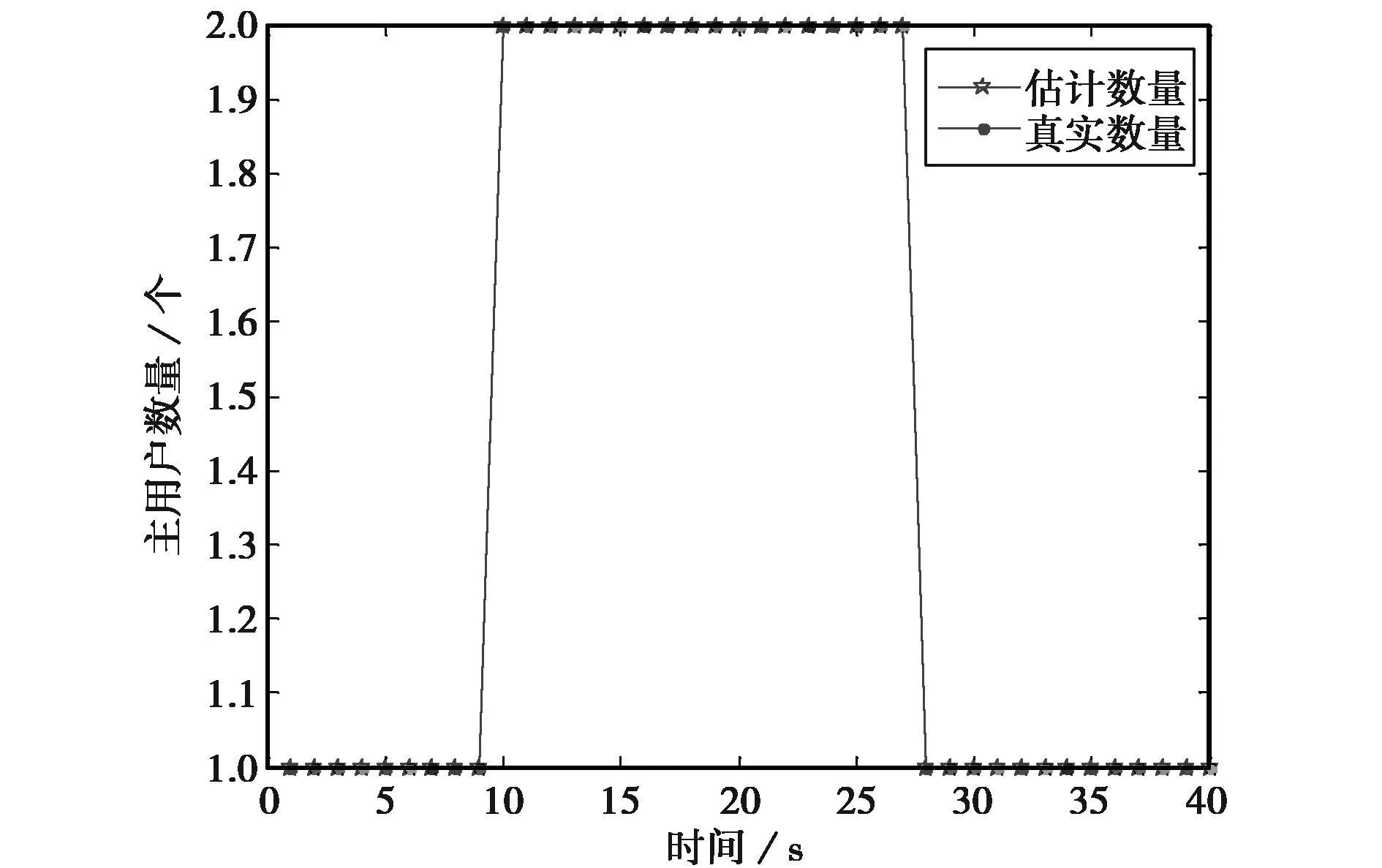
图6 检测区域内主用户的数量估计
图7给出了对主用户的位置的估计值与位置真实值的输出图.从图中我们可以看出,通过P-PHDF算法进行感知得到的估计值能够准确描述主用户信号的真实状态,与主用户的真实运动轨迹基本一致,将随机集理论与P-PHDF算法相结合能够实现对主用户位置状态的检测估计.
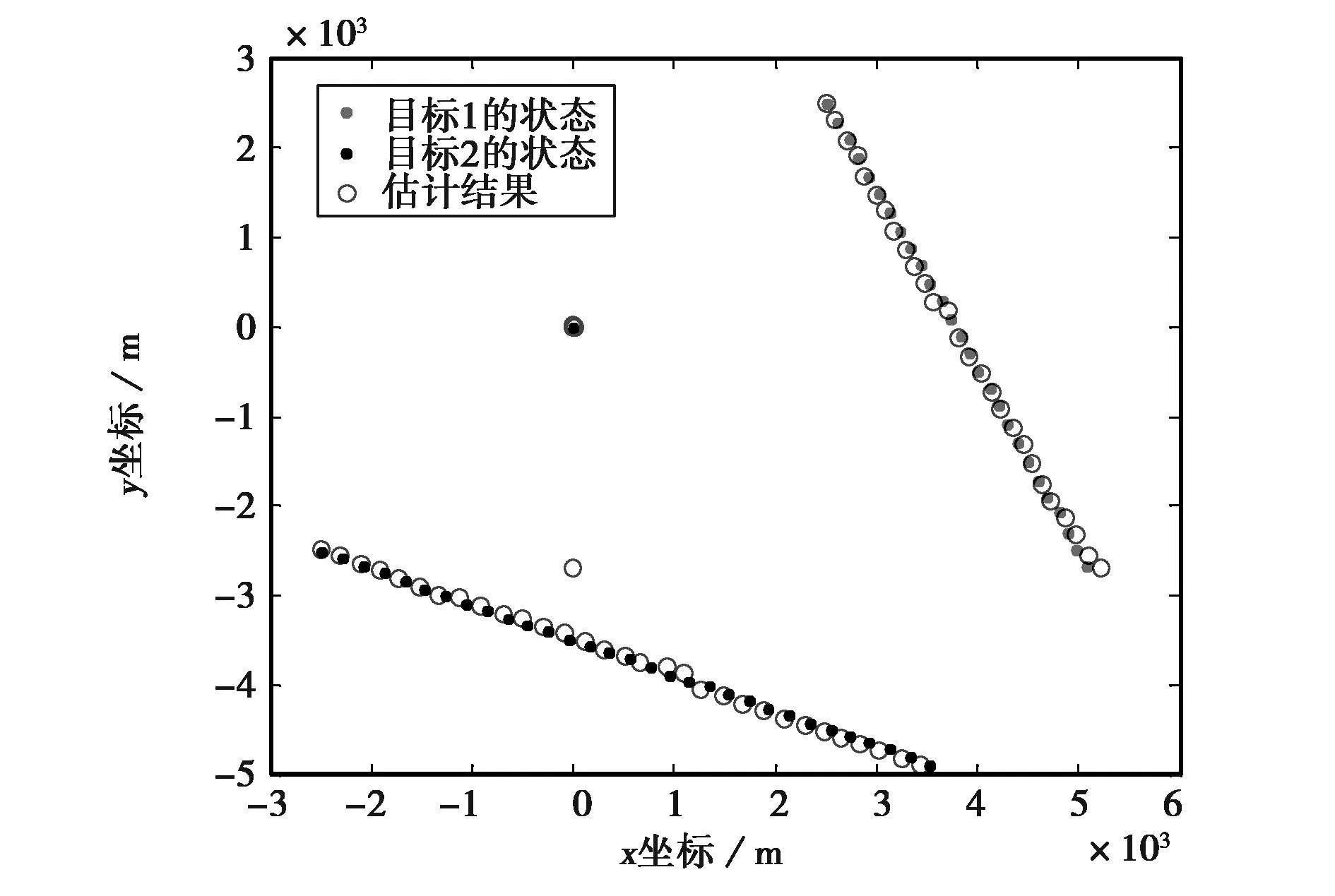
图7 主用户位置估计与真实值对比图
图8和图9分别为对主用户信号的使用频率和信号接收角度的估计输出图.可以看出,通过P-PHDF算法能够有效地实时估计出主用户各个时刻的所处频率和接受信号角度两个状态信息,通过将真实值与估计值对比可以看出,检测估计的状态值基本准确,能够可靠有效地表征主用户各时刻的状态值.
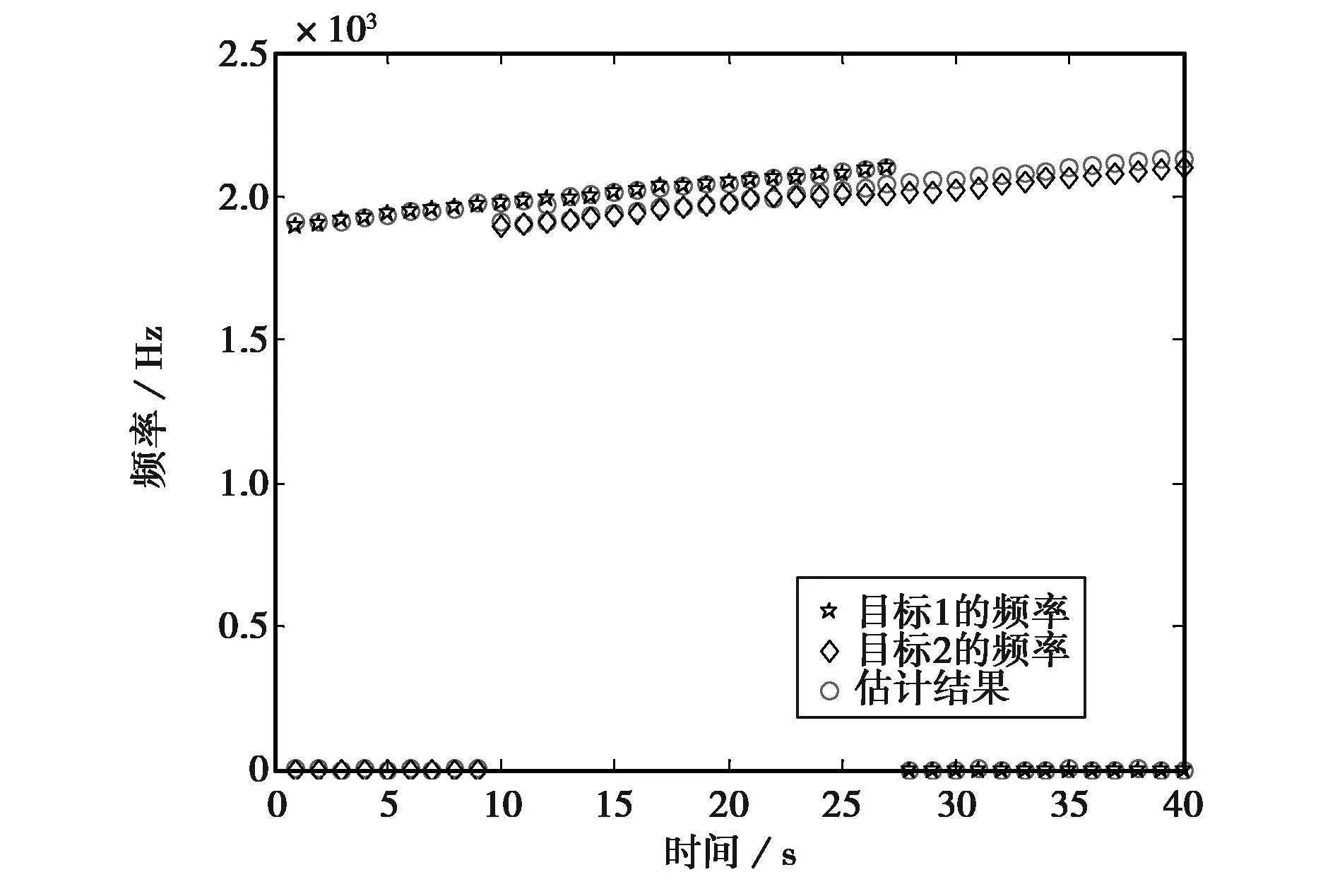
图8 对主用户信号的频率的估计输出图
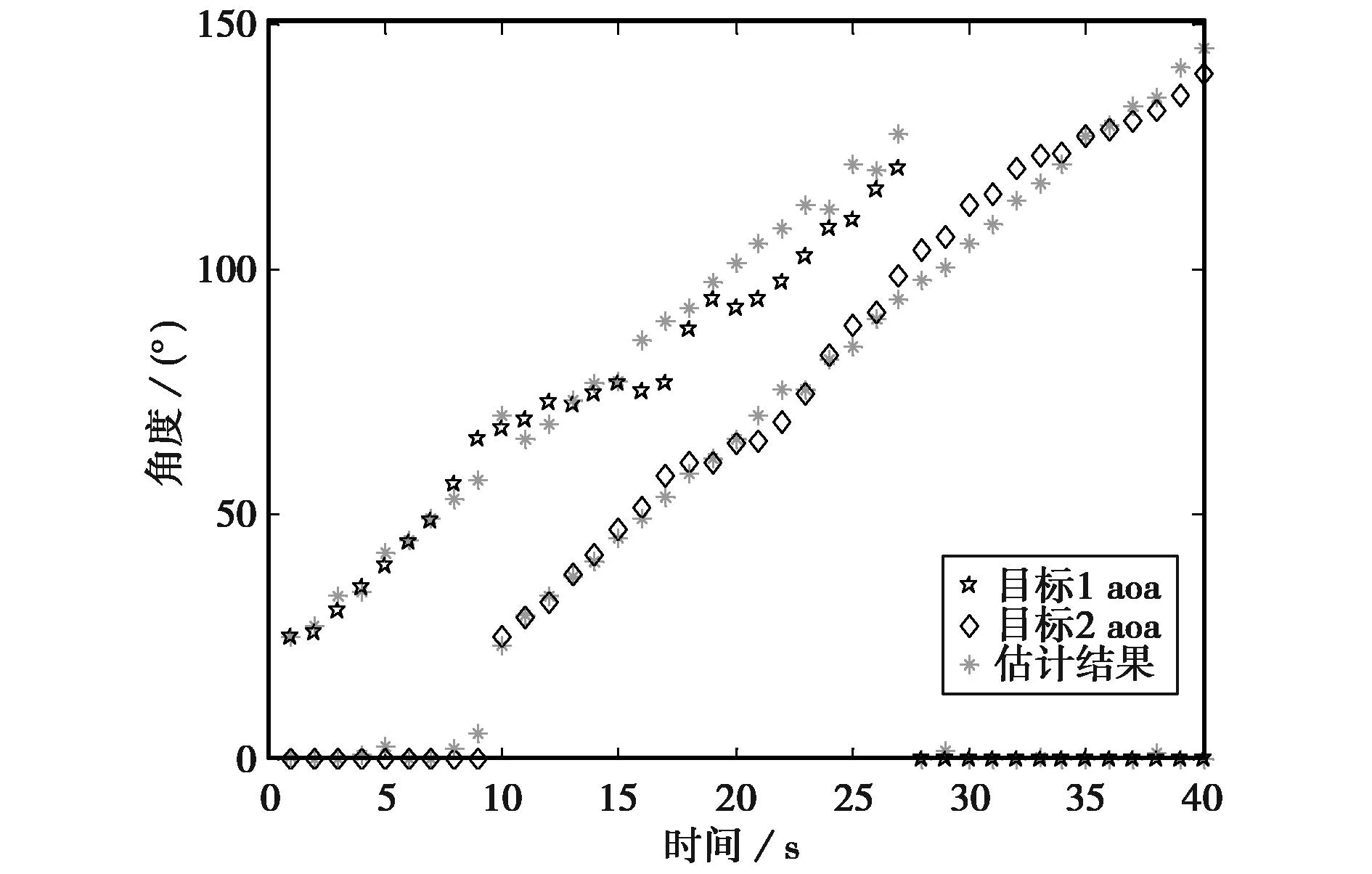
图9 对主用户接收角度的估计输出图
为了更加清楚地验证P-PHDF算法用于频谱感知系统的有效性及可靠性,我们同样给出算法的Wasserstein距离评估标准图,如图10所示.由图10可以看出,在整个检测时长内40s内,其输出的Wasserstein误差距离波动比较平稳,没有明显的峰值存在,对多信号检测追踪的整体性能良好,又进一步验证了粒子概率假设密度滤波算法用于多元移动认知网络从时间域、空间域、频率域来检测主用户信号数量及主用户各状态的有效性与可行性.
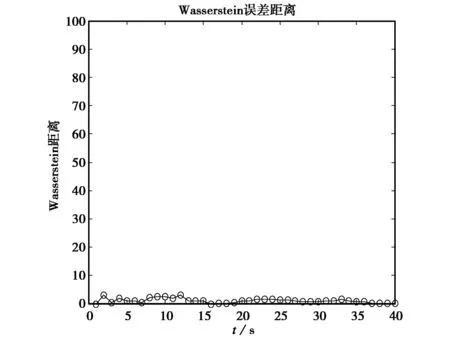
图10 Wasserstein距离
4结论
利用基于随机集的粒子概率假设密度滤波算法,本文实现了检测区域内对主用户的数量、位置、速度、使用频率、信号接收角度等状态信息的实时估计.文中介绍了粒子概率假设密度滤波的算法的具体实现过程以及评估算法性能的检测指标,给出了粒子概率假设密度滤波算法用于移动认知网络主用户数量检测的实验仿真.仿真结果验证了通过随机集问题研究频谱感知问题的可行性.
参考文献
[1]姚富强, 张建照, 柳永祥, 等. 动态频谱管理的发展现状及应对策略分析[J].电波科学学报,2013, 28(4): 794-803.
YAOFuqiang,ZHANGJianzhao,LIUYongxiang,etal.Reviewofthedevelopmentofdynamicspectrummanagementandtheresolvingstrategiesanalysis[J].ChineseJournalofRadioScience, 2013, 28(4): 794-803. (inChinese)
[2] 杜利平, 李飞, 周贤伟. 基于谱图的联合时频域主用户信号检测技术[J].电波科学学报, 2013, 28(6): 1105-1109.
DULiping,LIFei,ZHOUXianwei.Primaryuserdetectioninthejointtime-frequencydomainbasedontherange-Dopplerspectrogram[J].ChineseJournalofRadioScience, 2013, 28(6):1105-1109. (inChinese)
[3]KRIMH,VIBERGM.Twodecadesofstatisticalarrayprocessing[C]//ConferenceRecordoftheThirty-FirstAsilomarConferenceonSignals,Systems&Computers.PacificGrove:IEEE, 1997, 1:775-777.
[4] 占荣辉, 刘盛启, 欧建平,等. 基于序贯蒙特卡罗粒子概率假设密度滤波的多目标检测前跟踪改进算法[J].电子与信息学报, 2014, 36(11): 2593-2599.
ZHANRonghui,LIUShengqi,OUJianping,etal.ImprovedmultitargettrackbeforedetectalgorithmusingthesequentialMonteCarloprobabilityhypothesisdensityfilter[J].JournalofElectronics&InformationTechnology, 2014, 36(11): 2593-2599. (inChinese)
[5] 瑚成祥. 基于随机集理论的多目标跟踪算法[D].西安: 西安电子科技大学, 2014.
HUChengxiang.Multi-targetTrackingMethodBasedonRandomSetsTheory[D].Xi’an:XidianUniversity, 2014.(inChinese)
[6]RISTICB.Bayesianestimationwithimpreciselikelihoodsintheframeworkofrandomsettheory[C]//2011AustralianControlConference.Melbourne:IEEE, 2011: 481-486.
[7] 孟凡彬.基于随机集理论的多目标跟踪技术研究[D].哈尔滨:哈尔滨工程大学, 2010.
MENGFanbin.ResearchontheMulti-targetTrackingTechniquesBasedonRandomSetTheory[D].Harbin:HarbinEngineeringUniversity, 2010.(inChinese)
[8]BERGERJO.StatisticalDecisionTheoryandBayesianAnalysis[M].NewYork:SpringerSeriesinStatistics, 1985.
[9] 韩雅菲, 梁国龙, 付进, 等.有效降低计算量的粒子滤波多用户检测新方法[J].电波科学学报, 2010, 25(3): 574-578.
HANYafei,LIANGGuolong,FUJin,etal.Multi-userdetectionmethodforeffectivelyreducingcomputationalcomplexitybasedonparticlefilter[J].ChineseJournalofRadioScience, 2010, 25(3):574-578. (inChinese)
[10]姚柯柯. 基于粒子滤波的PHD多信号跟踪方法研究[D].西安: 西安电子科技大学, 2013.
YAOKeke.StudyonPHDMulti-targetTrackingMethodBasedonTheParticleFilter[D].Xi’an:XidianUniversity, 2013.(inChinese)
[11]BAR-SHALOMY.Multi-targetMulti-sensorTracking:AdvancedApplication[M].Norwood:ArtechHouse,1992.
[12]VOBN,SINGHS,ARNAUDD.SequentialMonteCarlomethodsformulti-targetfilteringwithrandomfinitesets[J].IEEETransactionsonAerospaceandElectronicSystems, 2005, 41(4): 1224-1245.
[13]KANDEEPANS,REISENFELDS,AYSALTC,etal.BayesianTrackingincooperativelocalizationforcognitiveradionetworks[C]//IEEE69thVehicularTechnologyConference.Barcelona:IEEE, 2009: 1-5.

杜利平(1975-),女,河南人,北京科技大学计算机与通信工程学院副教授,硕士生导师,主要研究方向为认知无线电、通信信号处理等.

何琴(1990-),女,河北人,北京科技大学计算机与通信工程学院硕士研究生,主要研究方向为认知无线电.

李飞(1988-),女,河北人,北京科技大学计算机与通信工程学院硕士研究生,主要研究方向为认知无线电.

周贤伟(1963-),男,四川人,北京科技大学计算机与通信工程学院教授,博士生导师,研究方向为通信网络安全、下一代网络、移动IPv6等.
曹顺锋, 焦永昌, 张铮. 多种群首领决策遗传算法优化阵列天线[J]. 电波科学学报,2015,30(6):1137-1143. doi: 10.13443/j.cjors. 2014122501
CAO Shunfeng, JIAO Yongchang, ZHANG Zheng. Multi-population leader dominating genetic algorithm optimizing antenna arrays[J]. Chinese Journal of Radio Science,2015,30(6):1137-1143. (in Chinese). doi: 10.13443/j.cjors. 2014122501
谭冠南, 杨雪霞. 高效平面印刷毫米波段整流电路设计与实验[J]. 电波科学学报,2015,30(6):1131-1136. doi: 10.13443/j.cjors. 2015012101
TAN Guannan, YANG Xuexia. Design and experiment of a planar printed rectifying circuit operated in millimeter wave [J]. Chinese Journal of Radio Science,2015,30(6):1131-1136. (in Chinese). doi: 10.13443/j.cjors. 2015012101
Random sets theory based multi-dimensional spectrum
sensing with multiple primary users
DU LipingHE QinLI FeiZHOU Xianwei
(UniversityofScienceandTechnologyBeijing,SchoolofComputer&
CommunicationEngineering,Beijing100083,China)
AbstractMultiple primary user signal detection in cognitive mobile network is one of the main cognitive radio problems. This paper introduces random sets theory into the process of mobile network cognitive spectrum sensing, and builds the motion model and the sensor model of multiple primary users, and uses Particle Probability Hypothesis Density Filter to realize real-time detection of the primary users, including the number and status (position, velocity, frequency, signal reception angle) of each primary user. Compared with traditional spectrum sensing methods, the proposed method can track the number of primary users, the position, frequency, as well as arrival of angle. Simulation results show that the random set theory for multidimensional cognitive mobile network can be realized on real-time detection and update of the state of each primary user. It can reliably and effectively detect the number and status of primary users with high capacity of resisting disturbance.
Key wordsmulti-dimensional spectrum sensing; multiple primary user detection; random sets theory; particle probability hypothesis density filter
作者简介
收稿日期:2015-01-12
中图分类号TN014
文献标志码A
文章编号1005-0388(2015)06-1123-09
