
无人直升机自转着陆控制设计与仿真验证
2015-02-24 01:48庞晓楠赖水清
直升机技术 2015年4期
庞晓楠,赖水清
(1.中国人民解放军海军潜艇学院,山东 青岛 266000;2.中国直升机设计研究所,江西 景德镇 333001)
无人直升机自转着陆控制设计与仿真验证
庞晓楠1,赖水清2
(1.中国人民解放军海军潜艇学院,山东 青岛 266000;2.中国直升机设计研究所,江西 景德镇 333001)
针对常规构型无人直升机,研究在发生发动机空中停车的情况下,通过自转下滑进行应急着陆的控制方法,制定自转着陆控制策略,并通过仿真试验进行验证。
无人直升机;自转着陆;飞行控制
0 引言
随着无人直升机的快速发展和越来越多的使用,一个不容忽视的问题摆在我们面前,即飞行中忽然失去动力的无人直升机如何实现安全着陆。
据统计,因发动机失效引起的事故占直升机总事故的28.5%,自转下滑是实现直升机安全着陆的唯一手段。发动机空中停车后,直升机旋翼扭转力矩和反扭矩发生急剧变化,形成高度迅速下降、俯仰姿态忽然下俯和方向急偏的外部现象,直升机飞行员可根据当前飞行状况,迅速进行相应的操作,操纵直升机进入自转下滑飞行,实现安全着陆[1]。
自转飞行是直升机特有的飞行状态。在发动机空中停车的情况下,旋翼利用其原有的旋转动能和直升机势能仍能保持稳定的旋转,利用旋翼自转产生的拉力,可以操纵直升机进行垂直下降或滑翔。直升机自转飞行过程中存在诸多约束、不确定性、干扰等因素,使得自转着陆难度很大。自转飞行的操作方法是由试飞员和飞行员们在长期的飞行实践中总结出来的,目的是尽量充分地利用直升机的重力势能和旋翼的旋转动能,实现最小的着陆速度[2]。
对于无人直升机来说,当发生发动机空中停车故障时,自转着陆成功与否关系到直升机平台与机载设备,特别是地面人员的安全。为减小甚至避免事故造成的伤害,一方面在无人直升机设计阶段需充分考虑其自转性能,另一方面需设计可靠的自转着陆控制功能,在发动机空中停车时,自动进入自转下滑模态,控制无人直升机平稳着陆于安全地点[3]。
本文以常规单旋翼、单尾桨、滑橇起落架构型的无人直升机为对象,通过对其自转着陆过程中诸多影响因素和需求的分析,研究制定自转着陆控制策略,并进行仿真试验验证。
1 自转着陆控制设计
1.1 自转着陆要求
为了飞行安全,自转着陆应满足以下要求:
1)保证旋翼转速
旋翼转速是无人直升机飞行和操纵的基础,在自转下滑过程中,必须稳定旋翼转速。
2)尽可能减小下降速率
下降速率过大会减少无人直升机滞空时间,减小航程,不利于安全着陆。同时,下降速率过大,不利于控制触地下降速率,影响接地瞬间的安全。
3)尽量减小触地速度和触地下降速率
无人直升机采用滑撬式起落架,接地后通过滑撬触地滑行减速,若触地速度和下降速率过大会增加危险。
根据无人直升机自转着陆需求,制定自转着陆控制策略,如图1所示。整个自转着陆过程可分为四个阶段:自转建立段、稳定下滑段、末端拉起段和姿态改平段。
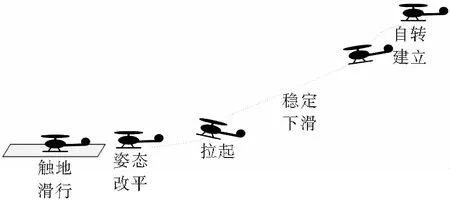
图1 自转着陆控制策略
1.2 自转建立段控制策略
自转建立段的任务是在发动机停车后,以最快速度恢复旋翼转速,并进入自转下滑状态。据此,自转建立段的控制策略为:
1)快速放开离合器:放开离合器可防止发动机运行阻力导致旋翼转速快速下降,同时,放开离合器后,旋翼反扭力矩不会耦合到机身,可减小尾桨操纵负担,有利于储备旋翼旋转动能。
2)快速将总距降到最低:通过将总距降到最低,使无人直升机快速建立下降速率,通过重力势能转化为旋翼旋转动能,恢复旋翼转速。
3)转速稳定控制:当旋翼转速恢复到正常范围之后,接入转速稳定控制,防止旋翼超转。转速控制通过总距操纵来实现,控制策略如图2所示。
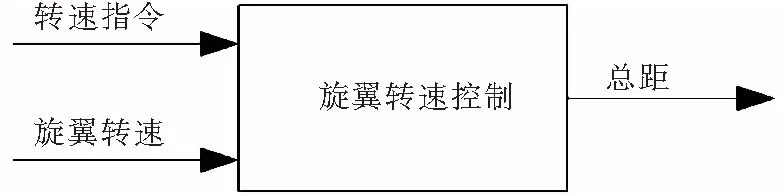
图2 旋翼转速控制策略
旋翼转速稳定后,无人直升机进入到自转下滑状态。
旋翼转速可以采用PI控制,控制结构如图3所示。
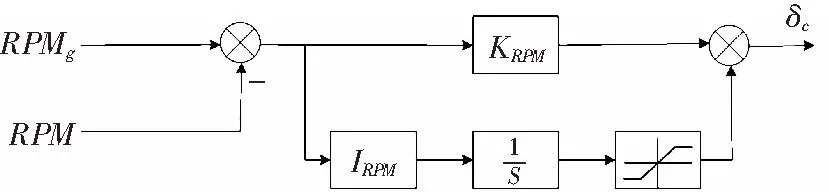
图3 旋翼转速控制结构
给定旋翼转速270rpm,对上述控制结构进行仿真验证,仿真曲线如图4所示。
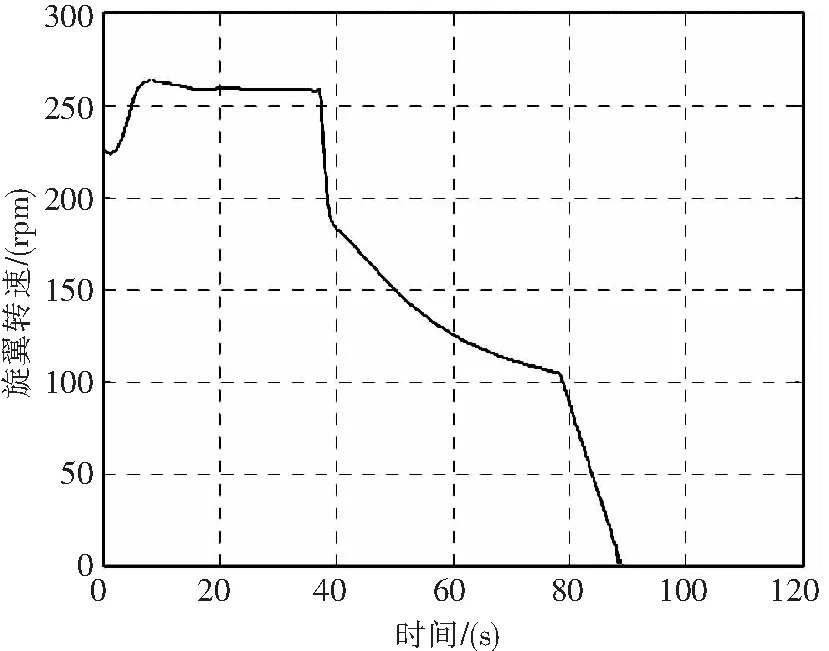
图4 下滑过程中旋翼转速变化曲线
可以看出,PI控制可以有效控制旋翼转速,建立稳定下滑。
1.3 稳定下滑段控制策略
稳定下滑段的任务是保证无人直升机以稳定轨迹角下滑。为了尽可能提高发动机停车后的飞行航程,并减小接地速度,稳定下滑段应尽可能减小下滑轨迹角。
根据直升机理论和试飞经验,以下面方式进行下滑时,下滑轨迹角最小:
1) 以经济旋翼转速下滑;
2) 以经济速度下滑。
根据稳定下滑段要求,该阶段以旋翼转速和速度控制为主。旋翼转速控制如图2所示,速度控制如图5所示。
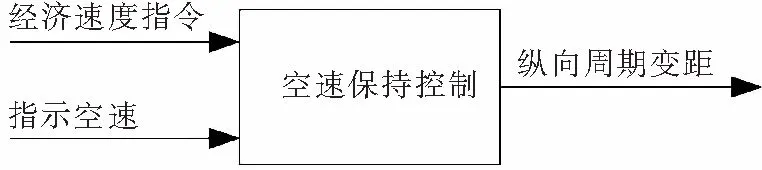
图5 速度控制策略
速度控制结构可以采用常规速度控制策略,给定速度为设计出的经济速度。仿真曲线如图6。
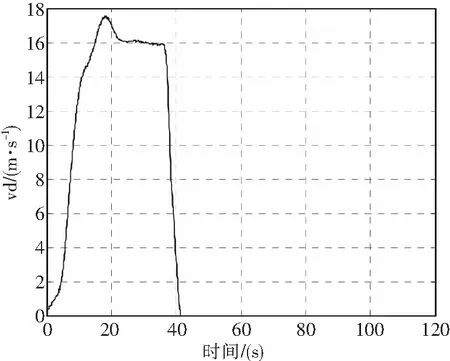
图6 下滑地速变化曲线
从曲线中可以看出,采用上述控制建立了稳定的下滑地速,满足自转着陆的需求。
1.4 末端拉起段控制策略
末端拉起段的任务是当无人直升机进入近地后,迅速拉起姿态和总距,拉平飞行轨迹,减小速度和下降速率,以减小触地速度和触地下降速率。
拉起操作通过抬高俯仰角来实现,拉起过程中无人直升机减速,在此过程中无人直升机动能向旋翼旋转动能转换,会导致旋翼转速增大。为了防止旋翼超速,应提高总距。因此,拉起段的控制以姿态控制为主,伴随总距的拉起控制。拉起姿态控制策略如图7所示。
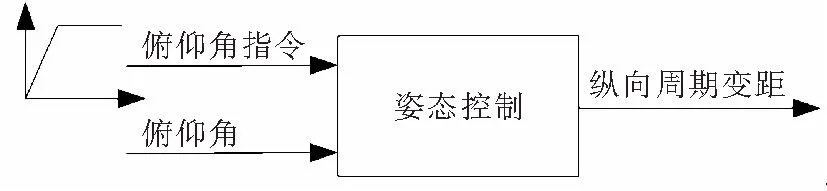
图7 末端拉起控制策略
1.5 姿态改平段控制策略
姿态改平段的任务是在接地前调整姿态,保证无人直升机水平触地,防止无人直升机以抬头姿态触地,引起尾桨触地,造成直升机损坏。因此姿态改平段的控制仍以姿态控制为主。控制策略如图8所示。
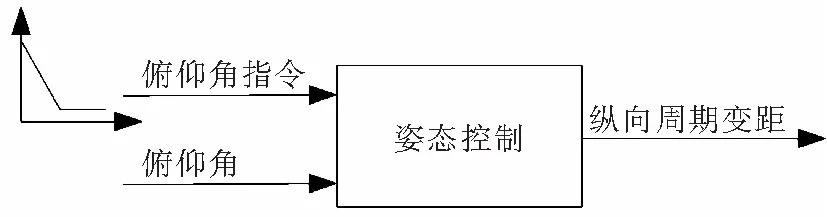
图8 姿态改平控制策略
姿态控制采用常规的俯仰角控制律,仿真曲线如图9所示。
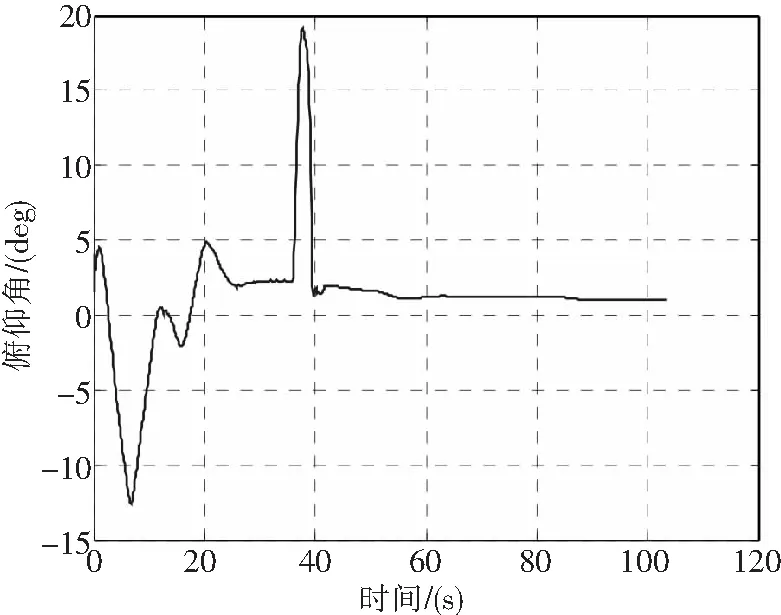
图9 俯仰角变化曲线
从俯仰角变化曲线中可以看出无人直升机在着陆时刻经历了姿态迅速拉起和姿态迅速改平两个阶段,对姿态的控制是有效的。
2 自转着陆控制仿真验证
以飞控计算机为核心,对自转着陆控制策略进行半物理仿真试验验证,仿真结果表明:无人直升机在发动机空中停车的情况下,能够通过自转下滑安全着陆,自转着陆控制策略合理可行。
2.1 初始速度对自转着陆的影响
对于相同的初始高度,在不同的初始速度下,自转建立段有差异,随着旋翼转速的稳定和下降速率的稳定,逐渐进入稳定下滑段,直到最后拉起进入姿态改平段,最后平稳落地。仿真曲线如图10-13所示。
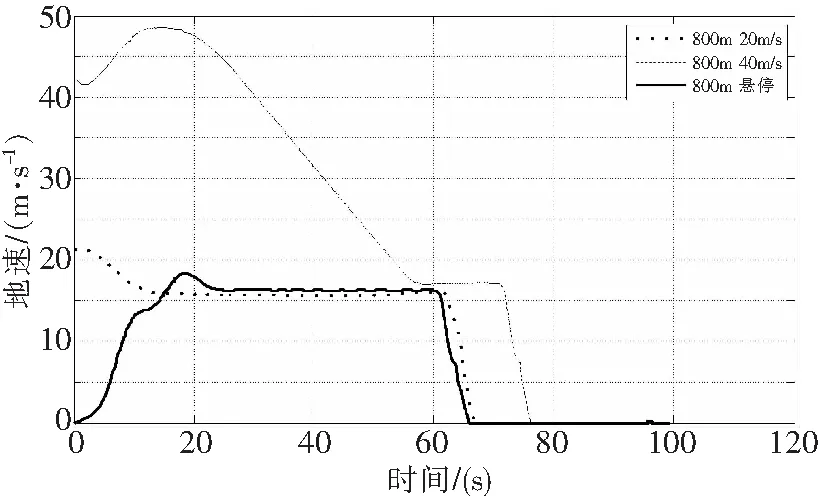
图10 初始速度对自转着陆的影响-地速变化曲线
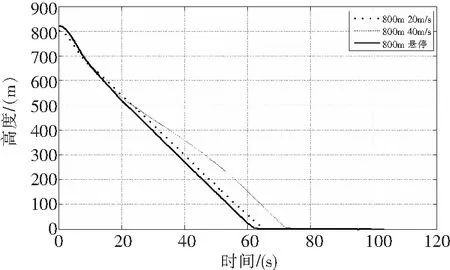
图11 初始速度对自转着陆的影响-高度变化曲线
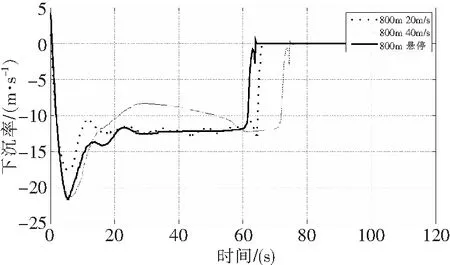
图12 初始速度对自转着陆的影响-下降速率曲线
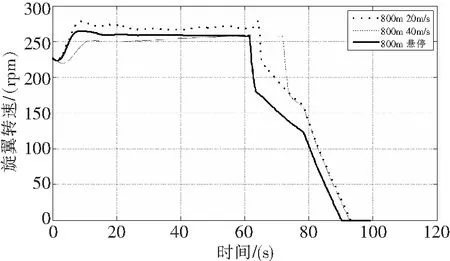
图13 初始速度对自转着陆的影响-旋翼转速曲线
2.2 初始高度对自转着陆的影响
对于相同的初始速度,在不同的初始高度下,自转建立段相差无几,稳定段的下降速率和旋翼转速都保持在稳定值左右,只是由于高度不同造成稳定下滑段时间长短也相应不同。仿真曲线如图14-17所示。
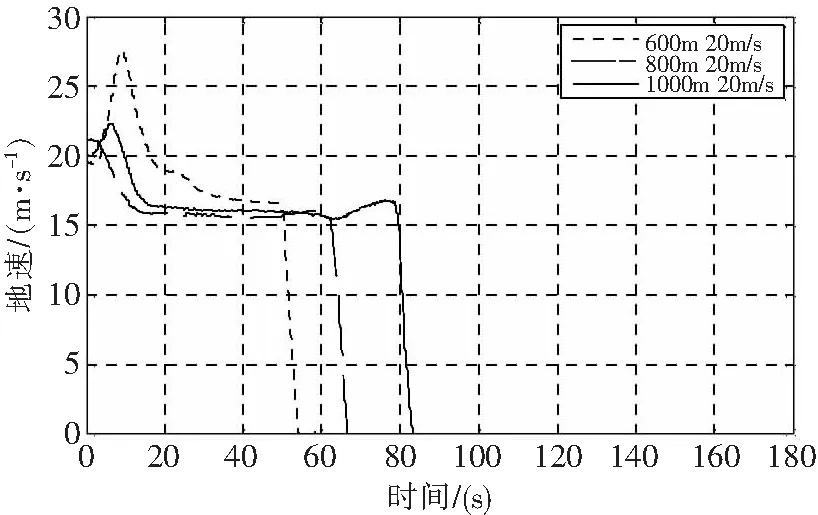
图14 初始高度对自转着陆的影响-地速变化曲线
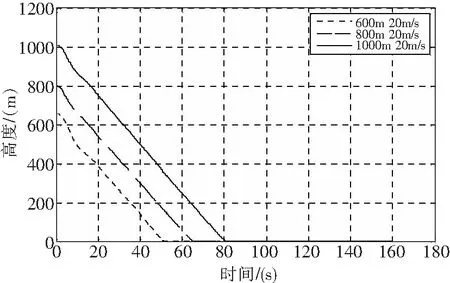
图15 初始高度对自转着陆的影响-高度变化曲线
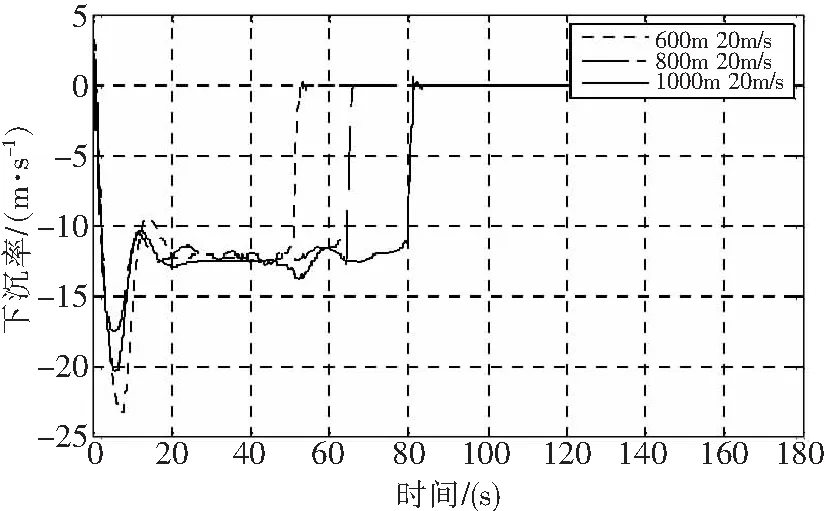
图16 初始高度对自转着陆的影响-下降速率曲线
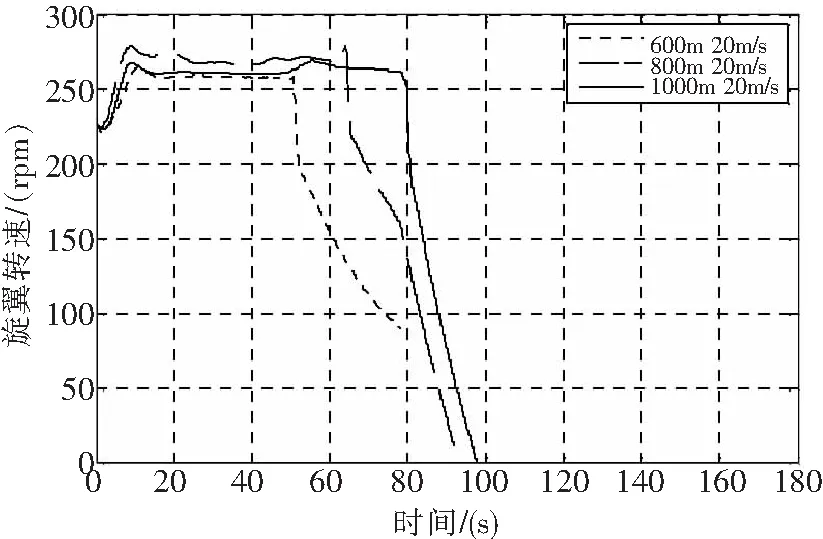
图17 初始高度对自转着陆的影响-旋翼转速曲线
2.3 旋翼转速对自转着陆的影响
不同旋翼转速对下降速率和总距的变化有不同程度的影响,仿真曲线如图18-21所示。当稳定下滑旋翼转速较小时,稳定下降速率相比额定转速时
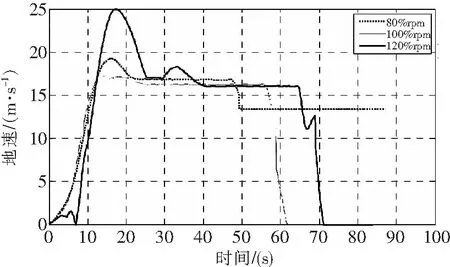
图18 旋翼转速对自转着陆的影响-地速变化曲线
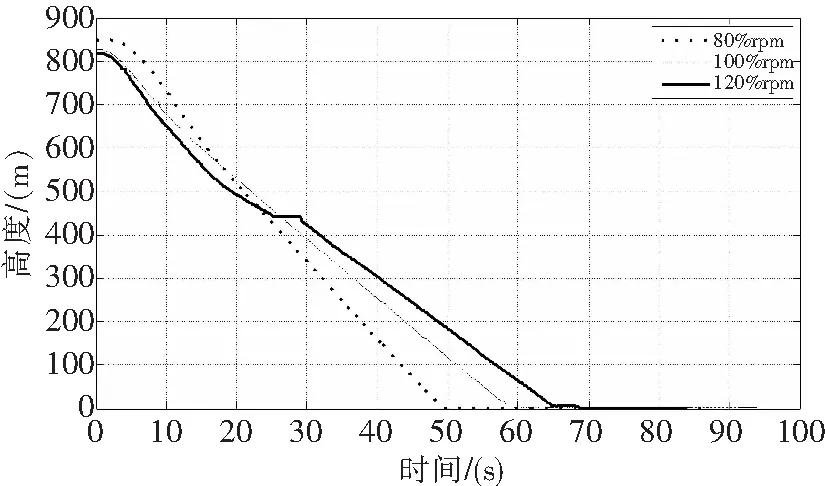
图19 旋翼转速对自转着陆的影响-高度变化曲线
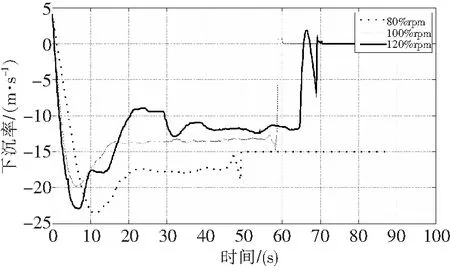
图20 旋翼转速对自转着陆的影响-下降速率曲线

图21 旋翼转速对自转着陆的影响-旋翼转速曲线
大,因此拉起时刻应该提前。当稳定下滑旋翼转速较大时,稳定下降速率相比额定转速时小,因此拉起时刻应该延后。
2.4 自转着陆高度下边界
选取初始高度为200m时,空中停车后仍能自转下滑落地,但几乎已经看不到稳定下滑过程,因此可以认为初始高度200m为自转着陆下边界。仿真曲线如图22-25所示。
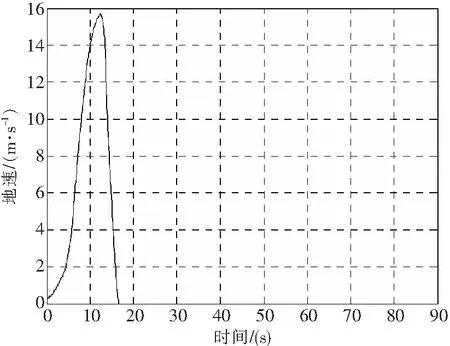
图22 200m高度下自转着陆地速变化曲线
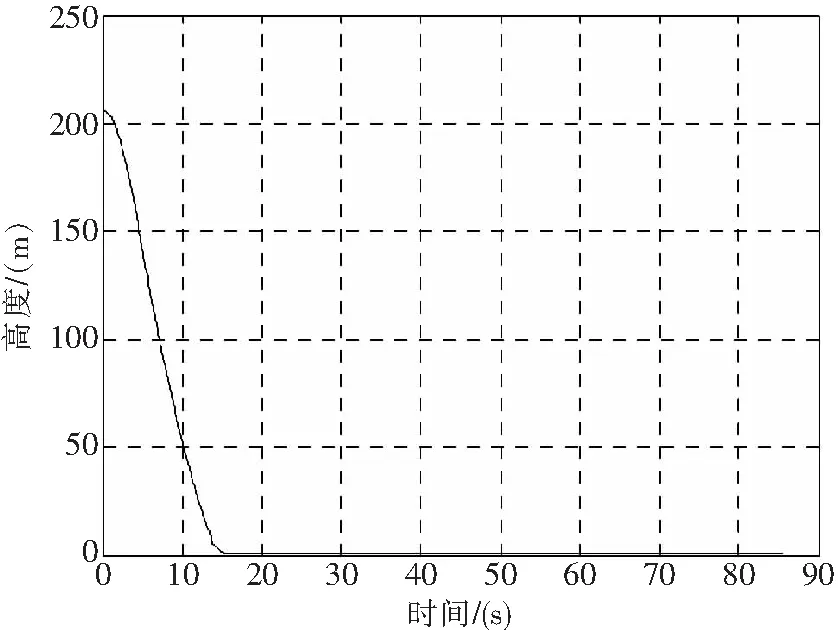
图23 200m高度下自转着陆高度变化曲线
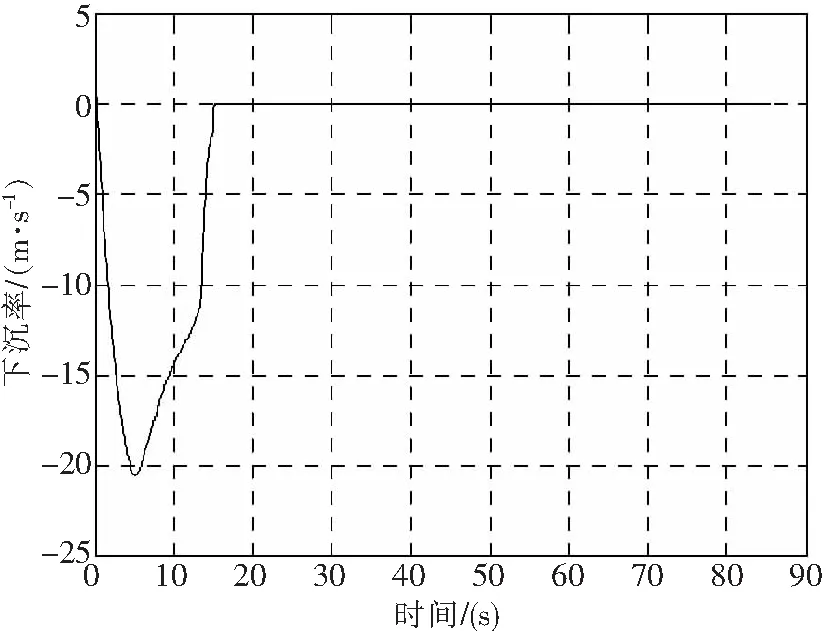
图24 200m高度下自转着陆下降速率变化曲线
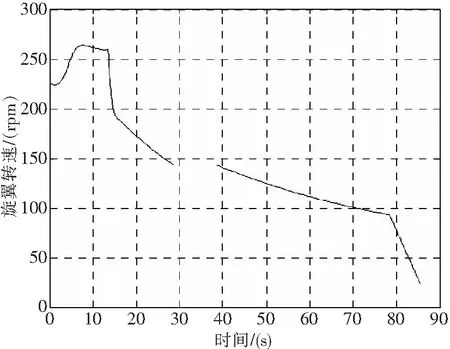
图25 200m高度下自转着陆旋翼转速变化曲线
2.5 结论
通过仿真试验结果分析,可以得出以下结论:
1) 若无人直升机以经济巡航速度和经济旋翼转速进行自转下滑,下滑轨迹角最小,航程最长,能最有效地利用无人直升机能量,提高着陆安全性;
2) 拉起操作时机的选择可能决定无人直升机能否安全着陆。若拉起过早,会导致旋翼转速过早消耗,增大下降速率;若拉起过晚,则未能充分利用旋翼提供的能量,也会导致触地时刻的速度和下降速率过大;
3) 若能精确预测航程,制定合理的S转弯策略,会有利于提高触地点位置精度,改善着陆安全。
3 结束语
自转着陆对直升机来说是非常危险的科目,难以开展飞行试验,对无人直升机来说,进行飞行试验难度更大。因此,需进行大量的分析和验证工作,在考虑各种不确定性和干扰的情形下,对触地位置、触地速度、下降速率和触地姿态进行分析,确保自转下滑策略可靠、安全。仿真试验表明,在一定的条件和合适的控制策略下,无人直升机能够实现平稳自转着陆,而且通过下滑飞行航迹控制,可以控制无人直升机飞行至安全区域进行着陆,尽可能地避免对地面人员的伤害。
[1] Lee A Y, Bryson A E Jr, Hindson W S. Optimal landing of helicopter in autorotation[R].Palo Alto:Stanford University,1986.
[2] Gebhard A. Flight path calculations for a helicopter in autorotive landing[R].Amsterdam: National Aerospace Lab,1992.
[3] Karapetyan G R. Mi-26 autorotional landings[R].Moscow: Mil Helicopter Plan,1993.
Design and Simulation of Autorotation Landing Control for Unmanned Helicopter
PANG Xiaonan1,LAI Shuiqing2
(1.PLA Navy Submarine Academy, Qingdao 266000, China;2.China Helicopter Research and Development Institute, Jingdezhen 333001, China)
The control method of emergency landing by autorotation for the conventional unmanned helicopter was researched while its engine was cutoff in flight, the control strategy of autorotation landing was developed and validated by simulation.
unmanned helicopter;autorotation landing;flight control
2015-09-02
庞晓楠(1979-),男,山东济南人,博士,讲师,主要研究方向:无人机飞行控制。
1673-1220(2015)04-024-06
V249.122+.5;V279
A
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
消费导刊(2018年10期)2018-08-20
专用汽车(2017年8期)2017-09-03
体育时空·上半月(2017年4期)2017-05-05
东西南北(2017年1期)2017-02-22
山东工业技术(2016年15期)2016-12-01
